Modeling and Simulation of Airflow Dynamics in a Dynamic Skip Fire
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Testing the System Page 1 of 4
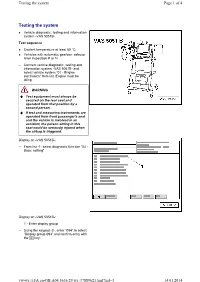
Testing the system Page 1 of 4 Testing the system Vehicle diagnostic, testing and information system -VAS 5051B- Test sequence Coolant temperature at least 80 °C. Vehicles with automatic gearbox: selector lever in position P or N – Connect vehicle diagnostic, testing and information system -VAS 5051B- and select vehicle system “01 - Engine electronics” from list. Engine must be idling. WARNING Test equipment must always be secured on the rear seat and operated from that position by a second person. If test and measuring instruments are operated from front passenger's seat and the vehicle is involved in an accident, the person sitting in this seat could be seriously injured when the airbag is triggered. Display on -VAS 5051B-: – From list -1- select diagnostic function “04 - Basic setting”. Display on -VAS 5051B-: 1 - Enter display group – Using the keypad -2-, enter “094” to select “Display group 094” and confirm entry with the Q key. vw-wi://rl/A.en-GB.A04.5636.29.wi::37889621.xml?xsl=3 14.01.2014 Testing the system Page 2 of 4 – Activate basic setting by touching key A . Display on -VAS 5051B-: – Increase the engine speed to above 2000 rpm for approx. 10 seconds. – Check specifications in display zones -3- and -4-. Display zones 1234 Display group 94: variable valve timing, bank 1 (right-side) and bank 2 (left-side) Display xxxx rpm --- --- --- Readout Engine speed Variable valve timing Variable valve timing Variable valve timing bank 1 bank 2 Range CS-ctrl ON Test OFF Test OFF CS-ctrl OFF Test ON Test ON Syst. -

Camshaft Deviation Codes.Pdf
AD07.61 -P-4000 -94VA Page 1 of 2 AD07.61-P-4000- Continuous camshaft adjustment - 94VA fault code description ME Angular deviation of camshafts to the crankshaft 1 Fault code 1197 Exhaust camshaft on right cylinder bank, permanent advanced ( Readout on generic scan tool) position (P0017) 1198 Exhaust camshaft on right cylinder bank, permanent retarded position (P0017) 1200 Exhaust camshaft on right cylinder bank, displacement (P0017) 1201 Exhaust camshaft on left cylinder bank, permanent advanced position (P0019) 1202 Exhaust camshaft on left cylinder bank, permanent retarded position (P0019) 1204 Exhaust camshaft on left cylinder bank, displacement (P0019) 1205 Intake camshaft on right cylinder bank, permanent advanced position (P0016) 1206 Intake camshaft on right cylinder bank, permanent retarded position (P0016) 1208 Intake camshaft on right cylinder bank, displacement (P0016) 1209 Intake camshaft on left cylinder bank, permanent advanced position (P0018) 1210 Intake camshaft on left cylinder bank, permanent retarded position (P0018) 1212 Intake camshaft on left cylinder bank, displacement (P0018) 2 Fault storage After expiry of test duration and fault Actuation of engine diagnosis Following two successive driving cycles with faults indicator lamp (EURO4) or CHECK ENGINE (MIL) malfunction indicator lamp 3 Checking frequency Continuous 4 Checked signal or status Comparison of position of the intake camshaft or exhaust camshaft to position of the crankshaft 5 Fault setting conditions 1197, 1201, 1205, 1209 - Permanent advanced position greater than a 20° crank angle 1198, 1202, 1206, 1210 - Permanent retarded position greater than a 20° crank angle 1200, 1204, 1208, 1212 - Fault if after adjustment of a camshaft the new position deviates more than a 9° crank angle from the required value. -

Off-Road Industrial Engines MAN Engines Off-Road Diesel Engines Fordiesel Agricultural and Environmental, Construction and Special Machinery and Special Construction
Industrial engines Off-Road Off-Road Diesel engines for agricultural and environmental, construction and special machinery MAN Engines Built for everyone who wants to move things in a big way. Contents MAN diesel engines for agricultural and construction machinery Performance spectrum and applications . 4 MAN key technologies . 4 Development to meet operational requirements . 4 Easy system integration . 4 Intelligent service solutions . 4 The shared component concept . 4 Modular exhaust gas treatment kit (AGN kit) . 4 Reliability . 4 Description of engines D0834 and D0836 . 6 D2676 . 8 D3876 . 10 D2868 . 12 D2862 . 14 MAN diesel engines for agricultural and construction machinery Time and cost pressure are increasing, both in agriculture and in the construction industry. This is why reliability and economic efficiency are more important in these businesses than ever before. MAN engines are the constant factor that makes the machines reliable, both in brisk day-to-day business and in their life-cycle costs. Our MAN engines can help you move things in a big way – either as a vehicle operator or as a designer. Performance spectrum and applications MAN off-road engines with a displacement of 4.6 to 24.2 liters come with ratings ranging from 110 kW to 882 kW (150 hp to 1 200 hp). Applications include: nnAgricultural machinery nnCutters and shredders nnSpecial machinery such as nnConstruction machinery nnEnvironmental and recycling snowcats nnMobile cranes and materials technology transport MAN key technologies Development to meet operational Easy system integration Our key to your success: When de signing requirements One name – one system . MAN makes and developing an MAN off-road engine, Our concepts are off-road in the truest use of a single defined engine inter- we rely on innovative technologies such sense of the word, that is to say they face to exchange data and commands as turbo-charging using variable turbine are extraordinary . -

Mike Mavrigian Special Firing Order Camshafts Allow the Performance
Performance Perspectives Special firing order camshafts allow the performance engine builder to create a smoother-running engine, with improved fuel distribution and enhanced crankshaft and main bearing durability. his article falls under the category for the same reasons...to smooth out the harmon- of “thinking outside the box.” It’s a ics in the pursuit of greater engine durability and trite phrase, I know, but the point to potentially generate more power. is that we don’t need to always Power gain potential aside, the primary reason think of an OE carmaker’s engine to address (and alter) cylinder firing order is to Mike firing order specification as gospel. achieve a smoother-running engine (a smoother, Mavrigian In certain racing applications, a special firing or- more lineal acceleration ramp), with less harmonic Tder (SFO) camshaft can be used as a tuning aid, effect (and crank deflection) on the crankshaft and [email protected] allowing the competition engine builder to fur- its main bearings. In theory, virtually all engines can ther address combustion heat and crankshaft dis- benefit from this. The engines that can most bene- turbance (harmonic) issues. fit include those that run at or near peak rpm levels In essence, the goal in changing the firing or- for long periods of time, such as oval track, road der is to create a smoother-running engine and race and marine engine applications, as well as en- more even fuel distribution, with enhanced gines that are called upon to produce maximum crankshaft and main bearing durability. In the power in a very short period of time (drag race). -

MX-13 MX-13 Coach & Bus Engine Coach & Bus Engine
MX-13 MX-13 Coach & Bus engine Coach & Bus engine DAF Components Hugo van der Goeslaan 1 P.O Box 90065 5600PT Eindhoven The Netherlands www.dafcomponents.com [email protected] Tel. +31 (0)40 21 43 293 ISO14001 ISO/TS16949 Environmental Quality Management System Management System No rights can be derived from this publication. DAF Trucks N.V. reserves the right to change product specifi - cations without prior notice. Products and services comply with the Global Directives effective at the time of sale but may vary depending on the country in which you are located. For the most recent information, contact DW143203/0919 DAF Components. A PACCAR COMPANY DRIVEN BY QUALITY DAF COMPONENTS MX-13 Coach & Bus engine The 12.9 Litre PACCAR MX-13 engine uses state of the A well-controlled and further optimized combustion MX-13 ENGINE art technologies, fi rst class materials, extensive function process using smart dosing controls and modulating fuel No. of cylinders and cylinder arrangement 6 in line, vertical integration and a heavy duty foamed wire loom to achieve line pressure assures highest effi ciency and lowest fuel Valves 4 highest reliability and durability. Excellent torque at low consumption ever. Repair & Maintenance costs have been Bore x Stroke [mm] 130 x 162 engine speeds and a high performance is available over a cut as well by extending intervals and increased uptime. Piston displacement [dm3] 12.9 wide rev. range. The best engine has become even better. Compression ratio 18,5 : 1 The engine is available in Euro 6, Euro 5 and Euro 3 Aspiration Turbocharged with charge cooling versions. -

Table of Contents S65B40 Engine
Table of Contents S65B40 Engine Subject Page Crankcase and Crankshaft Drive . .3 Engine Block with Bedplate Construction . .3 Crankshaft . .4 Connecting Rods . .4 Pistons . .5 Oil Supply . .6 Oil Supply Hydraulic Circuit Diagram . .8 Valvetrain . .10 Cylinder Head . .10 Hydraulic Bucket Tappet . .11 CamshaftDrive................................................12 VANOS . .13 Belt Drive . .16 Air Supply . .17 Air Intake Guide/Oil Separator/Secondary Air System . .17 Oil Separators . .18 Secondary Air System . .18 Individual Throttle Butterfly System . .19 Idle Control System . .20 Fuel Supply . .21 Cooling System . .22 Exhaust System . .24 Initial Print Date: 1/08 Revision Date: S65B40 Engine Model: E90 M3, E92 M3 Production: 2/2008 After completion of this module you will be able to: Identify the components of the S65B40 engine Identify the difference between the S85B50 and S65B40 engines Explain the oil supply system of the engine 2 S65B40 Engine Crankcase and Crankshaft Drive Engine Block with Bedplate Construction The construction and materials are identical to the S85; the upper low-pressure die-cast crankcase is made from an aluminum-silicon alloy. The cylinder bores are formed using exposed hard silicon crystals, rendering the use of cylinder liners redundant. The lower crankcase (bedplate) is also constructed using die-cast aluminum. Due to the extreme forces, grey cast iron inlays are used to reinforce the bedplate construction. These also limit crankshaft bearing clearances over a greater temperature range and thus have a positive effect on the oil flow rate. S65B40 Engine block with bedplate construction Index Explanation 1 Engine block (upper section) 2 Grey cast iron inlays 3 Bedplate construction (lower section) 3 S65B40 Engine Crankshaft The five-bearing crankshaft is forged from a single piece, including the two double-chain wheels for driving the valve gear. -

Performance Camshafts
PERFORMANCE CAMSHAFTS Street or strip, Engine Pro Performance Camshafts simply out perform the competition. Our manufacturing accuracy promotes improved valve train stability resulting in improved power gain. Our “controlled ramp” lobe profiles offer acceleration rates extending valve train life while delivering maximum horsepower. • Ground in the U.S.A. 100% American Made Castings and Billets • Manganese Phosphate Coated, Flame Hardened Castings or Induction Hardened Billets CAMSHAFT RANGE & SELECTION CHART • Computer Designed Lobe Profiles for Maximum Power • Profiles are Adcole Verified for the Ultimate in Accuracy SEE INDIVIDUAL LISTINGS FOR MORE INFORMATION • Journal Roundness Maintained to Within .0002” STAGE 1 CHARACTERISTICS RECOMMENDATIONS CAMSHAFT APPLICATION CHART IDLE QUALITY: SMOOTH STOCK TOWING: GOOD FOR PULLING HEAVY LOADS NOTES: TORQUE: IMPROVED LOW END, RACING: NOT RECOMMENDED COMMENTS 1600-2000 RPM COMPUTER MODIFICATIONS NOT NEEDED MECH/ DUR @ .050” ADV. DUR. VALVE LIFT LOBE SEP POWER LIFTER BELOW FUEL ECONOMY: YES CONTROLLED PART # HYD STAGE INT EXH INT EXH INT EXH INT EXH RANGE IDLE PART# PART # VEHICLES: AMERICAN MOTORS V8, 1966-92 TRANSMISSION: STOCK AUTOMATIC OR MANUAL 290, 304, 343, 360, 390, 401 C.I. DURATION @ .050’’: COMPRESSION MC1786 HYD 2 204 214 280 290 .448 .472 105 115 1500-4000 SMOOTH 2011 B, D UP TO 195 HYDRAULIC RATIO: 9.0:1 OR LESS COMMENT: GOOD AND LOW MID RANGE TORQUE AND PULLING POWER BUICK V6, 1978-88 STAGE 2 CHARACTERISTICS RECOMMENDATIONS 181, 196, 231, 252 C.I (EVEN FIRE W/INTEGRAL DIST. DRIVE GEAR) MC1731 HYD 1 194 204 270 280 .424 .448 109 119 1000-5000 SMOOTH 969 B IDLE QUALITY: SMOOTH TOWING: GOOD FOR LIGHT PULLING AND RV USE COMMENT: GOOD MILEAGE. -

M62 Engine Details (PDF)
TABLE OF CONTENTS Subject Page M62TU Engine . .. .. 2 Vanos Operation . .3-12 Engine Cooling System. 13 IHKA System Auxilary Pump. 14 DME-ME 7.2 Engine Management. 15 IPO ME 7.2. 16 Integral Electronic Throttle System (EML). .17 Input Signal/Components. .19 Camshaft Position Sensors. 19 Hot Film Air Mass Sensor (HFM 5). 20 Integrated Ambient Barometeric Pressure Sensor. .21 Radiator Outlet Temperature Sensor. 22 DSC III Road Speed Signal. 22 Accelerator Pedal Sensor (PWG). 23 EDK Throttle Position Feedback Signal. 24 MFL Cruise Control Data Signal. .25 Brake Light Switch. 25 Can Bus. .26 Output Control Functions. .. .27 E-Box. .27 Secondary Air Injection. .28 Auxiliary Fan Control. .29 Electric Throttle Control. 30 DM-TL. .. 31 Leak Diagnosis Test Precondition. 34 M62TU Engine / ME7.2 The 4.4i X5 is equipped with the M62 TU B44 (4.4 liter) engine. Features of the M62 TU engine include: • Digital motor Electronics Control ME 7.2. • Variable positioned intake camshaft VANOS system. • “EML” Electronic Throttle Control System identified as EDK. • Compact water cooled generator (F-alternator). • Thermostat controlled transmission fluid/engine coolant heat exchanger system for automatic transmission equipped vehicles. • Non Return Fuel Rail (Running Loss Compliance). • IHKA Auxillary Water Pump. 2 M62 TU VANOS OVERVIEW The variable intake valve timing system on the M62 TU continues to be identified as VANOS. This acronym comes from the German words; VAriable NOckenwellen Steuerung, which means Variable Camshaft Control. The M62 TU VANOS system is a new variant providing stepless VANOS functionality on each intake camshaft. The system is continuously variable within its range of adjustment providing optimized camshaft positioning for all engine operating conditions. -

(12) United States Patent (10) Patent N0.: US 6,321,698 B1 Rau Et Al
US006321698B1 (12) United States Patent (10) Patent N0.: US 6,321,698 B1 Rau et al. (45) Date of Patent: Nov. 27, 2001 (54) INTERNAL COMBUSTION ENGINE 1024825 * 4/1953 (FR). 121605A * 5/1919 (GB) ................................. .. 123/551 (75) Inventors; Erhard Rau, We?heim; Wilhelm 97/40267 * 10/1997 (WO) ..................................... .. 75/22 Huettner, Waiblingen; Joerg Abtho?', Pluederhausen, all of (DE) OTHER PUBLICATIONS (73) Assignee; Daimlerchrysler AG, Stuttgart (DE) “18—Zylinder von Volkswagen”, Autos Test Technik, mot No. 11, ISSN 0027—1462, pp. 16—23, (May 15, 1998). ( * ) Notice: Subject to any disclaimer, the term of this patent is extended or adjusted under 35 * cited by examiner U.S.C. 154(b) by 0 days. Primary Examiner—Noah P. Kamen (21) Appl- NOJ 09/369,225 Assistant Examiner—Hai Huynh (22) Filed Aug 5 1999 (74) Attorney, Agent, or Firm—Kenyon & Kenyon . , _ _ (57) ABSTRACT Related US. Application Data (60) Provisional application No. 60/095,774, ?led on Aug. 7, An internal combustion engine having four individual cyl 1998- inder banks, in each case tWo cylinder banks being arranged (51) Int. c1.7 .................................................... .. F02B 75/22 in a V-éharw With respect to one another in such a Way that (52) us CL 123/54_4 the cylinder banks forming a V are disposed on both sides (58) Field of i i i i i i 4 1 54 4 of one engine plane E de?ned by a vertical aXis H that 123/54 8 55 1 54 6 54 7 54 2 symmetrically divides the internal combustion engine and ' ’ ' ’ ' ’ ' ’ ' by a longitudinal aXis L of the internal combustion engine, (56) References Cited one cylinder bank of the cylinder banks that are associated With one another in a V-shape being con?gured closer to the US. -

Diagnosis and Prognosis of Fuel Injectors Based on Control Adaptation
Diagnosis and Prognosis of Fuel Injectors based on Control Adaptation Azeem Sarwar1, Chaitanya Sankavaram2, and Xiangxing Lu3 1,2,3 Vehicle Health Management Group, Vehicle Systems Research Laboratory, General Motors Company, 30565 William Durant Blvd, Warren, MI, USA [email protected] [email protected] [email protected] ABSTRACT 54.5 mpg by 2025 (Ferguson & Kirkpatrick, 2015). Follow- ing the stricter requirements, the emission level of current in- Spark Ignition Direct Injection (SIDI) technology enables ternal combustion engines has decreased to about 5% of the better fuel economy and tail pipe emissions in vehicles emission levels that were prevalent 40 years ago (Ferguson & equipped with gasoline engines. The SIDI technology de- Kirkpatrick, 2015). pends on the ability of the system to deliver fuel at high pres- sure directly into the combustion chamber, hence making the Up until 1990s, Port Fuel Injection (PFI) Engines reflected fuel injectors key subcomponents. Reliable performance of state of the art for production gasoline engines (C¸elik & fuel injectors is vital as it directly relates to the operability of Ozdalyan, 2010). Advancement in computer-based con- the vehicle, and hence customer satisfaction in case of failure. trol made it possible to deliver gasoline precisely through It, therefore, becomes very important to devise a scheme that solenoid-based fuel injectors, just upstream or at the back of can effectively diagnose and prognose such a component. In each cylinder’s intake valve. The fuel then mixes with the this article, algorithm development for diagnosis and a path- incoming air, and gets pulled into the combustion chamber way to prognosis of fuel injectors is presented. -

Piston Engine Fundamentals TC010-05-01S
LEVEL F PPiissttoonn EEnnggiinnee FFuunnddaammeennttaallss TTCC001100--0055--0011SS Mazda Motor Corporation Technical Service Training Piston Engine Fundamentals CONTENTS TC010-05-01S 1 – INTRODUCTION ............................................................................1 Course Overview ..................................................................................1 Audience and Purpose...................................................................1 Course Content and Objectives .................................................2 How to Use This Guide .........................................................................3 Section Objectives .........................................................................3 Text and Illustrations......................................................................3 Review Exercises ..........................................................................4 2 – BASIC OPERATION.......................................................................5 Objectives .............................................................................................5 How Power is Developed......................................................................6 Harnessing Power..........................................................................6 Controlling Combustion..................................................................7 The Four-Stroke Cycle..........................................................................9 Intake Stroke............................................................................... -

Internal Combustion Engine
AccessScience from McGraw-Hill Education Page 1 of 15 www.accessscience.com Internal combustion engine Contributed by: Neil MacCoull, Donald L. Anglin Publication year: 2014 A prime mover that burns fuel inside the engine, in contrast to an external combustion engine, such as a steam engine, which burns fuel in a separate furnace. See also: ENGINE . Most internal combustion engines are spark-ignition gasoline-fueled piston engines. These are used in automobiles, light- and medium-duty trucks, motorcycles, motorboats, lawn and garden equipment, and light industrial and portable power applications. Diesel engines are used in automobiles, trucks, buses, tractors, earthmoving equipment, as well as marine, power-generating, and heavier industrial and stationary applications. This article describes these types of engines. For other types of internal combustion engines see GAS TURBINE ; ROCKET PROPULSION ; TURBINE PROPULSION . The aircraft piston engine is fundamentally the same as that used in automobiles but is engineered for light weight and is usually air-cooled. See also: RECIPROCATING AIRCRAFT ENGINE . Engine types Characteristics common to all commercially successful internal combustion engines include (1) the compression of air, (2) the raising of air temperature by the combustion of fuel in this air at its elevated pressure, (3) the extraction of work from the heated air by expansion to the initial pressure, and (4) exhaust. Four-stroke cyc le. William Barnett first drew attention to the theoretical advantages of combustion under compression in 1838. In 1862 Beau de Rochas published a treatise that emphasized the value of combustion under pressure and a high ratio of expansion for fuel economy; he proposed the four-stroke engine cycle as a means of accomplishing these conditions in a piston engine ( Fig.