Business Plan 2
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Maxar Technologies with Respect to Future Events, Financial Performance and Operational Capabilities
Leading Innovation in the New Space Economy Howard L. Lance President and Chief Executive Officer Forward-Looking Statement This presentation contains forward-looking statements and information, which reflect the current view of Maxar Technologies with respect to future events, financial performance and operational capabilities. The forward-looking statements in this presentation include statements as to managements’ expectations with respect to: the benefits of the transaction and strategic and integration opportunities; the company’s plans, objectives, expectations and intentions; expectations for sales growth, synergies, earnings and performance; shareholder value; and other statements that are not historical facts. Although management of the Company believes that the expectations and assumptions on which such forward-looking statements are based are reasonable, undue reliance should not be placed on the forward-looking statements because the Company can give no assurance that they will prove to be correct. Any such forward-looking statements are subject to various risks and uncertainties which could cause actual results and experience to differ materially from the anticipated results or expectations expressed in this presentation. Additional information concerning these risk factors can be found in the Company’s filings with Canadian securities regulatory authorities, which are available online under the Company’s profile at www.sedar.com, the Company’s filings with the United States Securities and Exchange Commission, or on the Company’s website at www.maxar.com, and in DigitalGlobe’s filings with the SEC, including Item 1A of DigitalGlobe’s Annual Report on Form 10-K for the year ended December 31, 2016. The forward-looking statements contained in this presentation are expressly qualified in their entirety by the foregoing cautionary statements and are based upon data available as of the date of this release and speak only as of such date. -
International Space Station Program Mobile Servicing System (MSS) To
SSP 42004 Revision E Mobile Servicing System (MSS) to User (Generic) Interface Control Document Part I International Space Station Program Revision E, May 22, 1997 Type 1 Approved by NASA National Aeronautics and Space Administration International Space Station Program Johnson Space Center Houston, Texas Contract No. NAS15–10000 SSP 42004, Part 1, Revision E May 22, 1997 REVISION AND HISTORY PAGE REV. DESCRIPTION PUB. DATE C Totally revised Space Station Freedom Document into an International Space Station Alpha Document 03–14–94 D Revision D reference PIRNs 42004–CS–0004A, 42004–NA–0002, 42004–NA–0003, TBD 42004–NA–0004, 42004–NA–0007D, 42004–NA–0008A, 42004–NA–0009C, 42004–NA–0010B, 42004–NA–0013A SSP 42004, Part 1, Revision E May 22, 1997 INTERNATIONAL SPACE STATION PROGRAM MOBILE SERVICING SYSTEM TO USER (GENERIC) INTERFACE CONTROL DOCUMENT MAY 22, 1997 CONCURRENCE PREPARED BY: PRINT NAME ORGN SIGNATURE DATE CHECKED BY: PRINT NAME ORGN SIGNATURE DATE SUPERVISED BY (BOEING): PRINT NAME ORGN SIGNATURE DATE SUPERVISED BY (NASA): PRINT NAME ORGN SIGNATURE DATE DQA: PRINT NAME ORGN SIGNATURE DATE i SSP 42004, Part 1, Revision E May 22, 1997 NASA/CSA INTERNATIONAL SPACE STATION PROGRAM MOBILE SERVICING SYSTEM (MSS) TO USER INTERFACE CONTROL DOCUMENT MAY 22, 1997 Print Name For NASA DATE Print Name For CSA DATE ii SSP 42004, Part 1, Revision E May 22, 1997 PREFACE SSP 42004, Mobile Servicing System (MSS) to User Interface Control Document (ICD) Part I shall be implemented on all new Program contractual and internal activities and shall be included in any existing contracts through contract changes. -

NASA's Lunar Orbital Platform-Gatway
The Space Congress® Proceedings 2018 (45th) The Next Great Steps Feb 28th, 9:00 AM NASA's Lunar Orbital Platform-Gatway Tracy Gill NASA/KSC Technology Strategy Manager Follow this and additional works at: https://commons.erau.edu/space-congress-proceedings Scholarly Commons Citation Gill, Tracy, "NASA's Lunar Orbital Platform-Gatway" (2018). The Space Congress® Proceedings. 17. https://commons.erau.edu/space-congress-proceedings/proceedings-2018-45th/presentations/17 This Event is brought to you for free and open access by the Conferences at Scholarly Commons. It has been accepted for inclusion in The Space Congress® Proceedings by an authorized administrator of Scholarly Commons. For more information, please contact [email protected]. National Aeronautics and Space Administration NASA’s Lunar Orbital Platform- Gateway Tracy Gill NASA/Kennedy Space Center Exploration Research & Technology Programs February 28, 2018 45th Space Congress Space Policy Directive-1 “Lead an innovative and sustainable program of exploration with commercial and international partners to enable human expansion across the solar system and to bring back to Earth new knowledge and opportunities. Beginning with missions beyond low-Earth orbit, the United States will lead the return of humans to the Moon for long-term exploration and utilization, followed by human missions to Mars and other destinations.” 2 LUNAR EXPLORATION CAMPAIGN 3 4 STRATEGIC PRINCIPLES FOR SUSTAINABLE EXPLORATION • FISCAL REALISM • ECONOMIC OPPORTUNITY Implementable in the near-term with the buying -
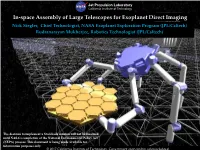
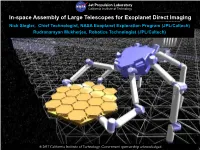
In-Space Assembly of Large Telescopes for Exoplanet
In-space Assembly of Large Telescopes for Exoplanet Direct Imaging Nick Siegler, Chief Technologist, NASA Exoplanet Exploration Program (JPL/Caltech) Rudranarayan Mukherjee, Robotics Technologist (JPL/Caltech) The decision to implement a Starshade mission will not be finalized until NASA’s completion of the National Environmental Policy Act (NEPA) process. This document is being made available for information purposes only. © 2017 California Institute of Technology. Government sponsorship acknowledged. Aperture size limited by launch vehicle Future science needs will require increasingly large telescopes In-Space Large Aperture Telescope Assembly Evolvable Space Telescope (NGAS) 5 6 4 1 3 2 3 4 m 1 2 Polidan et al. 2016 3 In-Space Large Aperture Telescope Assembly Using the Deep Space Gateway (cis-Lunar orbit) to assemble NASA GSFC 4 In-Space Large Aperture Telescope Upgrade Telescope returns from ESL2 for servicing at EML1 Courtesy: Future In-Space Operations (FISO) working group (2007) 5 In-Space Large Aperture Telescope Assembly Free-fliers (e.g. Orion) and assembly module docked to spacecraft bus NASA GSFC 6 DARPA Orbital Express (2007) • Multiple OEDMS autonomous berthing and docking maneuvers In-space firsts: • Transfer of fuel • Transfer of a battery through the use of 3-m long Astro robotic arm NEXTSat DARPA/Boeing/MDA/Ball Aerospace jpl.nasa.gov 7 Robotic Servicing Missions DARPA Robotic Servicing of Geosynchronous Satellites (RSGS) (SSL) DARPAjpl.nasa.gov Robotic Servicing Missions Restore-L (NASA GSFC) • Refueling an existing -
Downloaded for Infrastructure GIS Data
NATIONAL TECHNICAL DOCUMENT FOR ESTABLISHING CARTOGRAPHIC BASE IN INDIA Generation of Large Scale (1:10,000; 1:2,000 & Lesser) Maps for Disaster Management and Planning March 2016 National Disaster Management Authority Government of India CONTENTS Table of Contents Foreword i Preface ii Acknowledgement iii Table of Contents iv-vii List of Figures and Tables viii-ix Abbreviations x-xii Glossary of Terms xiii-xv Generation of National Topographic Database (NTDB) For 1:10,000; 1:2,000 & 1 1 Lesser Scale 1.1 Mapping at 1:10,000; 1:2,000 & Lesser Scale 2 1.2 NTDB on 1:10,000; 1:2,000 & Lesser Scale- A National Need 2 2 Geographical Information System for Disaster Management 3 2.1 GIS in Different Phases of Disaster Management 3-6 2.2 GIS database for Disaster Management 7-8 2.3 Scope for developing a GIS database for Disaster Management 8 2.4 Projection System 8 2.5 Positional Accuracy 8 2.6 Technology 8 2.7 Functional Requirements for Database Management 8-9 3 Critical Facilities Mapping (CFM) 10 3.1 Defining Critical Facilities for Mapping 10-11 4 Geo-referencing of Satellite Imagery 12-13 Technology for 1:10,000 Scale Mapping 14 5 Various Methodologies Available for Preparing Maps of Scale1:10,000 from 15 Images 5.1 Satellite Imaging 15 5.2 Aerial Photography 15 5.3 Comparison Between Satellite Imaging and Aerial Mapping 16 5.3.1 General Differences 16 5.3.2 Comparison of Accuracy of Imaging 17-18 5.4 Comparison of Ground Sampling Distance (GSD) for Satellite Imaging and 18-19 Aerial Photogrammetry 5.5 Aerial Mapping 20 5.5.1 Map Checking -

On-Orbit Assembly of Space Assets: a Path to Affordable and Adaptable Space Infrastructure
CENTER FOR SPACE POLICY AND STRATEGY FEBRUARY 2018 ON-ORBIT ASSEMBLY OF SPACE ASSETS: A PATH TO AFFORDABLE AND ADAPTABLE SPACE INFRASTRUCTURE DANIELLE PISKORZ AND KAREN L. JONES THE AEROSPACE CORPORATION © 2018 The Aerospace Corporation. All trademarks, service marks, and trade names contained herein are the property of their respective owners. Approved for public release; distribution unlimited. OTR201800234 DANIELLE PISKORZ Dr. Danielle Piskorz is a member of the technical staff in The Aerospace Corporation’s Visual and Infrared Sensor Systems Department. She provides data and mission performance analysis in the area of space situational awareness. Her space policy experience derives from positions at the Science and Technology Policy Institute and the National Academies of Sciences, Engineering, and Medicine, where she contributed to a broad range of projects in commercial and civil space. She holds a Ph.D. in planetary science from the California Institute of Technology and a B.S. in physics from Massachusetts Institute of Technology. KAREN L. JONES Karen Jones is a senior project leader with The Aerospace Corporation’s Center for Space Policy and Strategy. She has experience and expertise in the disciplines of technology strategy, program evaluation, and regulatory and policy analysis spanning the public sector, telecommunications, aerospace defense, energy, and environmental industries. She has an M.B.A. from the Yale School of Management. CONTRIBUTORS The authors would like to acknowledge contributions from Roy Nakagawa, Henry Helvajian, and Thomas Heinsheimer of The Aerospace Corporation and David Barnhart of the University of Southern California. ABOUT THE CENTER FOR SPACE POLICY AND STRATEGY The Center for Space Policy and Strategy is a specialized research branch within The Aerospace Corporation, a nonprofit organization that operates a federally funded research and development center providing objective technical analysis for programs of national significance. -

Leading in the New Space Economy
Leading in the New Space Economy September 2018 Forward-Looking Statement Certain statements and other information included in this presentation constitute "forward-looking information" or "forward-looking statements" (collectively, "forward-looking statements") under applicable securities laws. Statements including words such as "may", "will", "could", "should", "would", "plan", "potential", "intend", "anticipate", "believe", "estimate" or "expect" and other words, terms and phrases of similar meaning are often intended to identify forward-looking statements, although not all forward-looking statements contain these identifying words. Forward-looking statements involve estimates, expectations, projections, goals, forecasts, assumptions, risks and uncertainties, as well as other statements referring to or including forward-looking information included in this presentation. Forward-looking statements are subject to various risks and uncertainties which could cause actual results to differ materially from the anticipated results or expectations expressed in this presentation. As a result, although management of the Company believes that the expectations and assumptions on which such forward-looking statements are based are reasonable, undue reliance should not be placed on the forward-looking statements because the Company can give no assurance that they will prove to be correct. The risks that could cause actual results to differ materially from current expectations include, but are not limited to, the risk factors and other disclosures about the Company and its business included in the Company's continuous disclosure materials filed from time to time with Canadian and U.S. securities regulatory authorities, which are available online under the Company's SEDAR profile at www.sedar.com, under the Company's EDGAR profile at www.sec.gov or on the Company's website at www.maxar.com. -

Business Models for Satellite Maintenance & Debris Cleanup In
Tuesday, December 5 | 3:00 PM Business Models for Satellite Maintenance & Debris Cleanup in LEO Sponsored by: • Micah Webb, Business Development Intelligence, Information and Services, Raytheon Company • Frank DeMauro, Vice President & General Manager, Advanced Programs Division, Orbital ATK • Robert Feierbach, Vice President, Commercial Satellite Servicing, SSL • Justin Kugler, New Business Development Manager, Made In Space, Inc. • Lt Col Jeremy Raley, Program Manager, Tactical Technology Office (TTO), DARPA • Dr. Jared Squire, Senior VP of Research, Ad Astra Rocket Company Business Models for Satellite Maintenance & Debris Cleanup Frank DeMauro Vice President and General Manager Advanced Programs Division Orbital ATK Market For Commercial Life Extension TOTAL GEO POPULATION ~450 SC Commercial Operators Government Operators 63 U.S. Government Big Three Ops • >125 SC • 48 Operators • Many >$1B value Next 5 Ops 133 62 63 66 • 325+ SC in-orbit Foreign • Tight budgets Regional 10 Governments Small 30 Ops • 254 owned by top 63 25 Value Propositions to Commercial Operators Start New Orbital Roles The commercial market for satellite servicing and Maintain Secondary Roles debris cleanup in LEO Inclination Reduction starts in GEO Launch Backup Capital Expenditure Deferral Mission Extension Vehicle Reusable “Jet Pack” Propulsion and Attitude Control System Performs all Station Keeping Maneuvers for the Host Performs Attitude Control for the Host Using Reaction Wheels Docks to the Aft end of a Host and Stays There Until Service no Longer -
SSL Vs. Orbital ATK Involving Dragonfly Data
Case 4:17-cv-00025-RAJ-LRL Document 1 Filed 03/22/17 Page 1 of 25 PageID# 1 IN THE UNITED STATES DISTRICT COURT FOR THE EASTERN DISTRICT OF VIRGINIA Newport News Division SPACE SYSTEMS/LORAL, LLC ) ) Plaintiff, ) ) v. ) Civil Action No. _________________ ) ORBITAL ATK, INC., ) Jury Trial Demanded ) Defendant. ) _______________________________________) COMPLAINT Plaintiff Space Systems/Loral, LLC (“SSL”), by counsel, alleges and complains of Defendant Orbital ATK, Inc. (“Orbital ATK”) as follows: NATURE OF ACTION 1. Plaintiff SSL is a leading provider of geostationary satellites, space systems, and robotics technology. Specifically, SSL designs, manufactures, and builds some of the world’s most powerful and complex satellites, spacecraft systems, and in-space robotic applications for customers in the commercial, defense, and intelligence industries. 2. Founded in 1957, SSL has long been a significant innovator in the space systems and space-based robotics arena, investing in and developing cutting-edge technology immediately from its inception. 3. SSL’s reputation as a leader in its field is the result of the company’s ability to provide innovative and advanced solutions to meet its customers’ mission objectives and needs. Over the past 60 years, SSL and its affiliates have made significant contributions to space exploration and development. For example, robotic innovations by SSL and its affiliates have Case 4:17-cv-00025-RAJ-LRL Document 1 Filed 03/22/17 Page 2 of 25 PageID# 2 been vital to the construction and maintenance of the International Space Station (“ISS”) and to the development and refinement of ISS transport vehicles. 4. During 60 years of operations, SSL has established a long history with U.S. -
In-Space Assembly of Large Telescopes for Exoplanet Direct Imaging
In-space Assembly of Large Telescopes for Exoplanet Direct Imaging Nick Siegler, Chief Technologist, NASA Exoplanet Exploration Program (JPL/Caltech) Rudranarayan Mukherjee, Robotics Technologist (JPL/Caltech) © 2017 California Institute of Technology. Government sponsorship acknowledged. Aperture size limited by launch vehicle Future science needs will require increasingly large telescopes In-Space Large Aperture Telescope Assembly Evolvable Space Telescope (NGAS) 5 6 4 1 3 2 3 4 m 1 2 Polidan et al. 2016 3 In-Space Large Aperture Telescope Assembly Using the Deep Space Gateway (cis-Lunar orbit) to assemble NASA GSFC 4 In-Space Large Aperture Telescope Upgrade Telescope returns from ESL2 for servicing at EML1 Courtesy: Future In-Space Operations (FISO) working group (2007) 5 In-Space Large Aperture Telescope Assembly Free-fliers (e.g. Orion) and assembly module docked to spacecraft bus NASA GSFC 6 DARPA Orbital Express (2007) • Multiple OEDMS autonomous berthing and docking maneuvers In-space firsts: • Transfer of fuel • Transfer of a battery through the use of 3-m long Astro robotic arm NEXTSat DARPA/Boeing/MDA/Ball Aerospace jpl.nasa.gov 7 Robotic Servicing Missions DARPA Robotic Servicing of Geosynchronous Satellites (RSGS) (SSL) DARPAjpl.nasa.gov Robotic Servicing Missions Restore-L (NASA GSFC) • Refueling an existing satellite (Landsat 7) • Future capability demonstrations: Observatory repair Instrument replacement On-orbit assembly and manufacturing NASA GSFC 9 Beam Assembly Teleoperator (1983) Neutral buoyancy robot (Space Systems -

International Space Station EVA Operations –Phase 2 Hardware Lessons Learned
2001-01-2202 International Space Station EVA Operations –Phase 2 Hardware Lessons Learned David E. Anderson, Debra A. Meyer and Kashyap Shah Boeing Extravehicular & Crew Systems Copyright © 2001 Society of Automotive Engineers, Inc. ABSTRACT Phase 2 of International Space Station (ISS) assembly is scheduled to be complete by mid 2001. This paper will describe lessons learned by the hardware providers relative to Extravehicular Activity (EVA) operation for that hardware. With the completion of flight 7A scheduled for June 2001, the space station will include the first set of US solar arrays, KU band and S band antennas, Laboratory module, Space Station Remote Manipulator System (SSRMS), and Airlock, all EVA assembled. Figure 1. ISS Assembly EVA’s per year (Reference 3) Previously launched hardware will be reconfigured by EVA multiple times to accommodating the changing completed to date (see Figure 2), as seen from the configuration of the space station to maintain operability. Boeing Huntington Beach Engineering Mission Support Since the use of EVA is critical to everything from Room. This is only one piece of a larger, comprehensive attaching whole segments to installation of external summary of the lessons learned by NASA’s EVA team in hardware, to reconfiguration of thermal blankets, the total, which continues to be written. The hardware flown EVA operability of this hardware has been an important thus far have been designed and verified to a set of aspect of the design. Many EVA operations, while well general EVA requirements (see Reference 2). In trained for, have not been previously attempted on-orbit. different ways, each of the ISS assembly flights has This paper will discuss the hardware lessons learned expanded our understanding of EVA operability beyond from completed Phase 2 assembly flights. -
Maxar Technologies Ltd. (Exact Name of Registrant As Specified in Its Charter)
UNITED STATES SECURITIES AND EXCHANGE COMMISSION Washington, D.C. 20549 FORM 6-K REPORT OF FOREIGN ISSUER PURSUANT TO RULE 13A-16 OR 15D-16 UNDER THE SECURITIES EXCHANGE ACT OF 1934 For the month of September, 2018 Commission File Number: 001-38228 Maxar Technologies Ltd. (Exact Name of Registrant as specified in its charter) 1300 W. 120 th Avenue Westminster, Colorado 80234 (Address of principal executive offices and postal code) Indicate by check mark whether the Registrant files or will file annual reports under cover of Form 20-F or Form 40-F. Form 20-F ☐ Form 40-F ☒ Indicate by check mark if the Registrant is submitting the Form 6-K in paper as permitted by Regulation S-T Rule 101(b)(1): Yes ☐ No ☒ Indicate by check mark if the Registrant is submitting the Form 6-K in paper as permitted by regulation S-T Rule 101(b)(7): Yes ☐ No ☒ SUBMITTED HEREWITH Exhibit No. 99.1 Press Release, dated September 5, 2018 SIGNATURES Pursuant to the requirements of the Securities Exchange Act of 1934, as amended, the registrant has duly caused this report to be signed on its behalf by the undersigned, thereunto duly authorized. MAXAR TECHNOLOGIES LTD. Date: September 5, 2018 By: /s/ Michelle Kley Name: Michelle Kley Title: Senior Vice President, General Counsel and Corporate Secretary Exhibit 99.1 Maxar Technologies' DigitalGlobe Announces EnhancedView Contract Option Year Continues Serving U.S. Government Mission Needs Also Awarded Contract to Further Integrate With U.S. Government Systems WESTMINSTER, CO, Sept. 5, 2018 /CNW/ - DigitalGlobe , a Maxar Technologies company (formerly MacDonald, Dettwiler and Associates Ltd.) (NYSE: MAXR; TSX: MAXR), today announced it signed a contract with the U.S.