+ STS-127 Press Kit (PDF 6.8
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Back to the the Future? 07> Probing the Kuiper Belt
SpaceFlight A British Interplanetary Society publication Volume 62 No.7 July 2020 £5.25 SPACE PLANES: back to the the future? 07> Probing the Kuiper Belt 634089 The man behind the ISS 770038 Remembering Dr Fred Singer 9 CONTENTS Features 16 Multiple stations pledge We look at a critical assessment of the way science is conducted at the International Space Station and finds it wanting. 18 The man behind the ISS 16 The Editor reflects on the life of recently Letter from the Editor deceased Jim Beggs, the NASA Administrator for whom the building of the ISS was his We are particularly pleased this supreme achievement. month to have two features which cover the spectrum of 22 Why don’t we just wing it? astronautical activities. Nick Spall Nick Spall FBIS examines the balance between gives us his critical assessment of winged lifting vehicles and semi-ballistic both winged and blunt-body re-entry vehicles for human space capsules, arguing that the former have been flight and Alan Stern reports on his grossly overlooked. research at the very edge of the 26 Parallels with Apollo 18 connected solar system – the Kuiper Belt. David Baker looks beyond the initial return to the We think of the internet and Moon by astronauts and examines the plan for a how it helps us communicate and sustained presence on the lunar surface. stay in touch, especially in these times of difficulty. But the fact that 28 Probing further in the Kuiper Belt in less than a lifetime we have Alan Stern provides another update on the gone from a tiny bleeping ball in pioneering work of New Horizons. -

Air Leak on Space Station 29 September 2020
Russia reports 'non-standard' air leak on Space Station 29 September 2020 manned space programmes, in a televised comment. He said the ISS always has slight air loss due to the air purifying system. "These leaks are predictable. What's happening now is more than the standard leakage and naturally if it lasts a long time, it will require supplies of extra air to the station," he said. He said the crew were now resting but hoped to find the precise spot and fix the leak on Wednesday. Credit: Pixabay/CC0 Public Domain "That's not for sure," he added, saying there was quite a large area to search. "We have time. The leak exists of course. It's not Russia said Tuesday that astronauts had found an good that it's there, but it's not critical," he said. air leak in its section of the International Space Station, with a senior space official calling the air NASA said that the leak had appeared to grow in loss beyond expected levels. size overnight Monday to Tuesday and the crew were awakened by flight controllers to carry out a The crew on the ISS—Russian cosmonauts Anatoly search. Ivanishin and Ivan Vagner and NASA astronaut Christopher Cassidy—have been searching for the It was later found that a temperature change had air leak since August, first checking the US made the leak seem to grow, while the rate of air segment. escaping was "unchanged," the US space agency said. Russia's space agency, Roscosmos, said in a statement that after analysis and a search for the Previously, astronauts had searched for the source leak "it was established that the spot is located in of the leak in the US segment of the station using the Zvezda (star) service module, which contains an ultrasound detector. -

Committee on Appropriations UNITED STATES SENATE 135Th Anniversary
107th Congress, 2d Session Document No. 13 Committee on Appropriations UNITED STATES SENATE 135th Anniversary 1867–2002 U.S. GOVERNMENT PRINTING OFFICE WASHINGTON : 2002 ‘‘The legislative control of the purse is the central pil- lar—the central pillar—upon which the constitutional temple of checks and balances and separation of powers rests, and if that pillar is shaken, the temple will fall. It is...central to the fundamental liberty of the Amer- ican people.’’ Senator Robert C. Byrd, Chairman Senate Appropriations Committee United States Senate Committee on Appropriations ONE HUNDRED SEVENTH CONGRESS ROBERT C. BYRD, West Virginia, TED STEVENS, Alaska, Ranking Chairman THAD COCHRAN, Mississippi ANIEL NOUYE Hawaii D K. I , ARLEN SPECTER, Pennsylvania RNEST OLLINGS South Carolina E F. H , PETE V. DOMENICI, New Mexico ATRICK EAHY Vermont P J. L , CHRISTOPHER S. BOND, Missouri OM ARKIN Iowa T H , MITCH MCCONNELL, Kentucky ARBARA IKULSKI Maryland B A. M , CONRAD BURNS, Montana ARRY EID Nevada H R , RICHARD C. SHELBY, Alabama ERB OHL Wisconsin H K , JUDD GREGG, New Hampshire ATTY URRAY Washington P M , ROBERT F. BENNETT, Utah YRON ORGAN North Dakota B L. D , BEN NIGHTHORSE CAMPBELL, Colorado IANNE EINSTEIN California D F , LARRY CRAIG, Idaho ICHARD URBIN Illinois R J. D , KAY BAILEY HUTCHISON, Texas IM OHNSON South Dakota T J , MIKE DEWINE, Ohio MARY L. LANDRIEU, Louisiana JACK REED, Rhode Island TERRENCE E. SAUVAIN, Staff Director CHARLES KIEFFER, Deputy Staff Director STEVEN J. CORTESE, Minority Staff Director V Subcommittee Membership, One Hundred Seventh Congress Senator Byrd, as chairman of the Committee, and Senator Stevens, as ranking minority member of the Committee, are ex officio members of all subcommit- tees of which they are not regular members. -

December 2012 Newsletter
December 2012 Inside This Issue: pg: Sierra Lobo’s Headline News 1 Corporate News 2 USAF AFRL ARES III 15 Wolf Tracks NASA AMES Research Center (ARC) 16 NASA Glenn Research Center (GRC) 18 NASA Johnson Space Center (JSC) 20 NASA Kennedy Space Center (KESC) 21 NASA Kennedy Space Center (KISC) 22 NASA Langley Research Center (LaRC) 23 Michoud Assembly Facility (MAF) 25 Redstone Test Center (RTC) 26 Wright-Patterson AFB (WPAFB) 28 Technology Development and Engineering Center (TDEC) 29 Corporate Safety 32 Environmental Issues in T&E 33 Industry News 34 Welcome to the Pack 38 Industry Trivia 40 Sierra Lobo Wins the Engineering Fabrication Services (EFS) Contract at Johnson Space Center (JSC), Absorbs the Wind Tunnel Support Contract on RDSTS, and is Selected for the NASA Space Launch System Advance Development Program. Sierra Lobo (SLI) Primes EFS Win Sierra Lobo Wins SLS Contract The Cryo-Tracker® sensor is a winner of the The Lyndon B. Johnson Space Center, in SLI announces that NASA, Marshall Space R&D 100 Award, recognizing the top 100 ® best new technologies in the world. The Cryo Houston, Texas, NASA’s lead Center for Flight Center, selected our Cryo-Tracker ® human rated spaceflight hardware design and Mass Gauging System for their Space -Tracker sensor proposed for use as SLS’s production, selected Sierra Lobo to “Prime” Launch System (SLS) Advance Development cryogenic liquid-level sensing system is the its EFS Contract. The primary goals of this Program. This selection is part of NASA’s result of more than 16 years of concept contract are to provide JSC organizations and Research Announcement (NRA) to support exploration, validation, and extensive testing external customers the highest quality, cost the evolutionary development strategy for in laboratory and relevant environments. -
Conference Program
September 10-12, 2008 Gas prices Utah League of Cities and Towns Debt Inflation 101st Annual Convention Insurance Cost of food What’s Asphalt Up, Housing prices Sales tax revenue What’s Down Residential construction Making Life Better At our 100th Annual Convention last September, we unveiled our “Making Life Better Campaign.” One year later, many cities and towns around the state are using it to communicate the services and events that are provided for their residents. Around the hotel you’ll see a number of banners and signs that highlight what communities around the state are doing to make life better. Check our website, ulct.org, for more information about the campaign. THANKS TO OUR CONFERENCE SPONSORS Ballard Spahr Andrews & Ingersoll, LLP Cate Equipment Company Comcast Energy Solutions Gold Cross Ambulance Intermountain Healthcare Lewis Young Robertson & Burningham, Inc. Maverick Questar Rio Tinto Rocky Mountain Power UAMPS Union Pacific Utah Local Governments Trust Zions Bank Zions Bank Public Finance Wal-Mart Waste Management of Utah General Table Information of CONTENTS Introduction . 2 All events and sessions will be held at the Sheraton City Centre with the exception President’s Message . 3 of Wednesday night’s event which will be held at The Gateway. Entertainment . 4 Please turn cell phones and audible pagers off during all meetings, workshops, general sessions, luncheons, etc. Speaker Highlights ................................................ 6 Business Session Agenda ......................................... 10 Parking: Parking at the Sheraton City Centre is free for all ULCT conference attendees and vendors. 2008 Essay Contest Winners . 11 Activities at a Glance ............................................. 12 Registration Desk Hours Sheraton City Centre Map ...................................... -
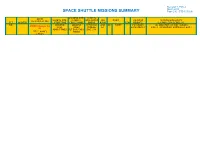
SPACE SHUTTLE MISSIONS SUMMARY Page 210 - STS-127/2JA
Revision T, PCN-4 March 2010 SPACE SHUTTLE MISSIONS SUMMARY Page 210 - STS-127/2JA LANDING SITE/ SSME-TL CREW LAUNCH SITE, RUNWAY, NOM-ABORT SRB ORBIT PAYLOAD MISSION HIGHLIGHTS (6+1 UP/6+1 DN) FLT ORBITER LIFTOFF TIME, CROSSRANGE EMERG RSRM FSW WEIGHTS, (LAUNCH SCRUBS/DELAYS, NO. LANDING LANDING THROTTLE AND INC HA/HP PAYLOADS/ TAL WEATHER, ASCENT I-LOADS, (PCN4 Change Col SITES, TIMES PROFILE ET EXPERIMENTS FIRSTS, SIGNIFICANT ANOMALIES, ETC.) 3) ABORT TIMES FLT DURATION, ENG. S.N. TITLE, NAMES WINDS & EVA'S Revision T, PCN-4 March 2010 SPACE SHUTTLE MISSIONS SUMMARY Page 210 - STS-127/2JA STS- OV-105 CDR: KSC 15 (KSC 104/104/10 BI-138 CARGO: Brief Mission Summary: STS-127 ( 29th (Flight 23) Mark Polansky KSC 39A 71) 9% 51. DIRECT OI- 36253LBS mission to ISS) was a “16 day marathon 127/ 196:22:03:09Z 6 INSERTION 33 ENDEAVO (Flt 3 - STS-98,STS- 212:14:48:07Z RSRM (29) (3) construction mission”. The final pieces of ISS- UR 116) 6:03:10 PM EDT 09:48:07 AM PREDICTED: 106 PAYLOAD the Japanese Kibo Complex including an 2JA P794/R262/V185/M22 (P) CDT 100/104.5/1 POST OMS- CHARGEABLE: Experiment Exposed Facility “Porch” and 8 6:03:10 PM EDT FRIDAY (15) 04.5/ ET-131 2: 24682 LBS the unpressurized Experiment Logistics (A) 123.8x32.3 SEQ OMS PODS 07/31/09 (12 ) 72/104.5 Module were delivered along with spare Wednesday SLWT NM DEPLOYED: FLT # LPO3 -33 PLT equipment intended to keep ISS (15) 35 24266 LBS 127 RPO4 29 Doug Hurley DEORBIT ACTUAL: operational long after Shuttle is retired. -

Senate Hearings Before the Committee on Appropriations
S. HRG. 114–178 Senate Hearings Before the Committee on Appropriations Commerce, Justice, Science, and Related Agencies Appropriations Fiscal Year 2016 114th CONGRESS, FIRST SESSION H.R. 2578 BUREAU OF ALCOHOL, TOBACCO, FIREARMS AND EXPLOSIVES DEPARTMENT OF COMMERCE—OFFICE OF THE SECRETARY DEPARTMENT OF JUSTICE—OFFICE OF THE ATTORNEY GENERAL DRUG ENFORCEMENT ADMINISTRATION FEDERAL BUREAU OF INVESTIGATION NATIONAL AERONAUTICS AND SPACE ADMINISTRATION NONDEPARTMENTAL WITNESSES UNITED STATES MARSHALS SERVICE Commerce, Justice, Science, and Related Agencies Appropriations, 2016 (H.R. 2578) S. HRG. 114–178 COMMERCE, JUSTICE, SCIENCE, AND RELATED AGENCIES APPROPRIATIONS FOR FISCAL YEAR 2016 HEARINGS BEFORE A SUBCOMMITTEE OF THE COMMITTEE ON APPROPRIATIONS UNITED STATES SENATE ONE HUNDRED FOURTEENTH CONGRESS FIRST SESSION ON H.R. 2578 AN ACT MAKING APPROPRIATIONS FOR THE DEPARTMENTS OF COM- MERCE AND JUSTICE, AND SCIENCE, AND RELATED AGENCIES FOR THE FISCAL YEAR ENDING SEPTEMBER 30, 2016, AND FOR OTHER PURPOSES Bureau of Alcohol, Tobacco, Firearms and Explosives Department of Commerce—Office of the Secretary Department of Justice—Office of the Attorney General Drug Enforcement Administration Federal Bureau of Investigation National Aeronautics and Space Administration Nondepartmental Witnesses United States Marshals Service Printed for the use of the Committee on Appropriations ( Available via the World Wide Web: http://www.gpo.gov/fdsys/browse/ committee.action?chamber=senate&committee=appropriations U.S. GOVERNMENT PUBLISHING OFFICE 93–106 PDF WASHINGTON : 2016 For sale by the Superintendent of Documents, U.S. Government Publishing Office Internet: bookstore.gpo.gov Phone: toll free (866) 512–1800; DC area (202) 512–1800 Fax: (202) 512–2104 Mail: Stop IDCC, Washington, DC 20402–0001 COMMITTEE ON APPROPRIATIONS THAD COCHRAN, Mississippi, Chairman MITCH McCONNELL, Kentucky BARBARA A. -

Space BD × Z-KAI Group × JAXA Started Educational Projects by Using "J-SPARC" Framework ~ Astronaut Training Method × Next Generation Type Education Project ~
Space BD × Z-KAI Group × JAXA Started Educational Projects by using "J-SPARC" Framework ~ Astronaut Training Method × Next Generation Type Education Project ~ November 13th 2018 Space BD Inc. Zoshinkai Holdings Inc. The Japan Aerospace Exploration Agency Space BD Inc. (CEO & Co-Founder Masatoshi Nagasaki, hereinafter "Space BD"), Zoshinkai Holdings Inc. (CEO Takaaki Fujii, hereinafter "Z-KAI Group") and The Japan Aerospace Exploration Agency (President Hiroshi Yamakawa, hereinafter "JAXA") started to create business in the education field in the framework of "J-SPARC" (JAXA Space Innovation through Partnership and Co-creation). By March 2019, Space BD will develop the Next Generation Type Education so-called "non- cognitive skills" method for all generations from children to adults (include corporate recruitment and training of companies) by analyze and evaluate the following items; (1) JAXA's Astronaut Training Method, (2) Experience and knowledge of Ms. Naoko Yamazaki (Astronaut), (3) Prof. Tatsuo Kitagawa’s Knowledge of international academic achievement evaluation tool / teaching material development record. Among the range of generation, Space BD collaborate with Z-KAI Group, which provides various educational services such as correspondence education and tutoring school, we will develop the programs (including teaching materials and program development) in the age group from children to university students. From April 2019, we will conduct test marketing and develop teaching materials for each age group. Finally, by April 2020, we aim for full- scale sales of the program and educational materials. JAXA will realize the maximization of JAXA research and development results not only in the space field, but also in the education field through provision of training methods for astronauts cultivated over many years. -

NASA Assigns STS-127, Expedition 19 Crews 12 February 2008
NASA assigns STS-127, Expedition 19 crews 12 February 2008 The U.S. space agency has assigned the crews for the STS-127 space shuttle mission and the Expedition 19 International Space Station mission. The Endeavour space shuttle's STS-127 mission is to deliver the final components of the Japanese space agency's Kibo laboratory to the space station. Expedition 19 will double the size of the station's resident crew to six people. Mark Polansky will command Endeavour for STS-127, targeted to launch in 2009. Marine Lt. Col. Douglas Hurley will serve as pilot, with astronauts Christopher Cassidy, Thomas Marshburn, David Wolf and Julie Payette, a Canadian Space Agency astronaut, onboard. The mission will deliver U.S. Army Col. Timothy Kopra to the station to join Expedition 18 as a flight engineer and science officer and return Japanese astronaut Koichi Wakata to Earth. Hurley, Cassidy, Marshburn and Kopra will be making their first trips into space. The Japanese module will provide a type of "front porch" for experiments in the exposed space environment. The mission is to include five spacewalks. Expedition 19 will be commanded by cosmonaut and Russian Air Force Col. Gennady Padalka. Copyright 2008 by United Press International APA citation: NASA assigns STS-127, Expedition 19 crews (2008, February 12) retrieved 26 September 2021 from https://phys.org/news/2008-02-nasa-assigns-sts-crews.html This document is subject to copyright. Apart from any fair dealing for the purpose of private study or research, no part may be reproduced without the written permission. The content is provided for information purposes only. -
Appendix Program Managers/Acknowledgments
Flight Information Appendix Program Managers/Acknowledgments Selected Readings Acronyms Contributors’ Biographies Index Image of a Legac y—The Final Re-entry Appendix 517 Flight Information Approx. Orbiter Enterprise STS Flight No. Orbiter Crew Launch Mission Approach and Landing Test Flights and Crew Patch Name Members Date Days 1 Columbia John Young (Cdr) 4/12/1981 2 Robert Crippen (Plt) Captive-Active Flights— High-speed taxi tests that proved the Shuttle Carrier Aircraft, mated to Enterprise, could steer and brake with the Orbiter perched 2 Columbia Joe Engle (Cdr) 11/12/1981 2 on top of the airframe. These fights featured two-man crews. Richard Truly (Plt) Captive-Active Crew Test Mission Flight No. Members Date Length 1 Fred Haise (Cdr) 6/18/1977 55 min 46 s Gordon Fullerton (Plt) 2 Joseph Engle (Cdr) 6/28/1977 62 min 0 s 3 Columbia Jack Lousma (Cdr) 3/22/1982 8 Richard Truly (Plt) Gordon Fullerton (Plt) 3 Fred Haise (Cdr) 7/26/1977 59 min 53 s Gordon Fullerton (Plt) Free Flights— Flights during which Enterprise separated from the Shuttle Carrier Aircraft and landed at the hands of a two-man crew. 4 Columbia Thomas Mattingly (Cdr) 6/27/1982 7 Free Flight No. Crew Test Mission Henry Hartsfield (Plt) Members Date Length 1 Fred Haise (Cdr) 8/12/1977 5 min 21 s Gordon Fullerton (Plt) 5 Columbia Vance Brand (Cdr) 11/11/1982 5 2 Joseph Engle (Cdr) 9/13/1977 5 min 28 s Robert Overmyer (Plt) Richard Truly (Plt) William Lenoir (MS) 3 Fred Haise (Cdr) 9/23/1977 5 min 34 s Joseph Allen (MS) Gordon Fullerton (Plt) 4 Joseph Engle (Cdr) 10/12/1977 2 min 34 s Richard Truly (Plt) 5 Fred Haise (Cdr) 10/26/1977 2 min 1 s 6 Challenger Paul Weitz (Cdr) 4/4/1983 5 Gordon Fullerton (Plt) Karol Bobko (Plt) Story Musgrave (MS) Donald Peterson (MS) The Space Shuttle Numbering System The first nine Space Shuttle flights were numbered in sequence from STS -1 to STS-9. -
Participation
PARTICIPATION A LOOK BACK AT 2007 Hinckley Institute Holds 2000th Hinckley Forum “OUR YOUNG, BEST MINDS MUST BE ENCOURAGED TO ENTER POLITICS.” Robert H. Hinckley 2 In This Issue Dr. J.D. Williams Page 3 Hinckley News Page 4 Internship Programs Page 8 Outstanding Interns Page 16 Scholarships Page 18 PARTICIPATION Hinckley Forums Page 20 Alumni Spotlights Page 25 Hinckley Staff Page 26 Donors Page 28 Hinckley Institute Holds 2000th Hinckley Forum Since 1965, the Hinckley Institute has held more than 2,000 Hinckley Forums (previously known as “Coffee & Politics”) featuring local, national, and international political leaders. Hinckley Forums provide University of Utah students and the surrounding community intimate access to and interaction with our nation’s leaders. Under the direction of Hinck- ley Institute assistant director Jayne Nelson, the Hinckley Institute hosts 65-75 forums each year in the newly renovated Hinckley Caucus Room. Partnerships with supporting Univer- sity of Utah colleges and departments, local radio and news stations, our generous donors, and the Sam Rich Program in International Politics ensure the continued success of the Hinckley Forums program. University of Utah students can now receive credit for attend- ing Hinckley Forums by enrolling in the Political Forum Series course (Political Science 3910). All Hinckley Forums are free and open to the public. For a detailed listing of 2007 Hinckley Forums, refer to pages 20 – 24. Past Hinckley Forum Guests Prince Turki Al-Faisal Archibald Cox Edward Kennedy Frank Moss Karl Rove Al Saud Russ Feingold William Lawrence Ralph Nader Larry Sabato Norman Bangerter Gerald Ford Michael Leavitt Richard Neustadt Brian Schweitzer Robert Bennett Jake Garn Richard Lugar Dallin H. -

Mishap Investigation Board Summary of Extravehicular
Journal of Space Safety Engineering – Vol. 1 No. 1 - June 2014 MISHAP INVESTIGATION BOARD SUMMARY OF EXTRAVEHICULAR ACTIVITY 23: Originally, the maintenance cycle for an individual LESSONS LEARNED FROM A SPACEWALK CLOSE CALL suit was after each Shuttle flight. Suit requirements supported three EVAs before ground conditioning. In order to support continuous ISS operation, the period Christopher Hansen(1), Christopher Cassidy(2) of EMU maintenance cycles was extended to one year or 25 EVAs. This maintenance period was extended to (1)NASA-Johnson Space Center, 2101 NASA Parkway, Houston, TX USA, Email:[email protected] two years in 2002 and to three years in 2007. The current (2)NASA-Johnson Space Center, 2101 NASA Parkway, Houston, TX USA, Email:[email protected] operational certification is 6 years. NASA’s decision to retire the Shuttle fleet in 2011 required another change to the EMU operations concept. The complement of EMUs ABSTRACT During the post-EVA debrief, Parmitano reported that on ISS was increased from three to four. Additional he had impaired visibility and breathing, with water ground processing is required for the EMU hardware The Space Station program convened a Mishap covering his eyes, nose, and ears. In addition, he had Figure 1. Extravehicular Mobility Unit (EMU) to meet this longer 6-year maintenance interval. This Investigation Board (MIB) to investigate a High Visibility audio communication issues because of the water. When processing includes cleaning or replacing water filters Close Call which occurred during US Extravehicular returning to the airlock, Parmitano had to rely on manual along with the stripping and recoating of areas with Activity (EVA) 23 on July 16, 2013.