Differential Geometry
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Toponogov.V.A.Differential.Geometry
Victor Andreevich Toponogov with the editorial assistance of Vladimir Y. Rovenski Differential Geometry of Curves and Surfaces A Concise Guide Birkhauser¨ Boston • Basel • Berlin Victor A. Toponogov (deceased) With the editorial assistance of: Department of Analysis and Geometry Vladimir Y. Rovenski Sobolev Institute of Mathematics Department of Mathematics Siberian Branch of the Russian Academy University of Haifa of Sciences Haifa, Israel Novosibirsk-90, 630090 Russia Cover design by Alex Gerasev. AMS Subject Classification: 53-01, 53Axx, 53A04, 53A05, 53A55, 53B20, 53B21, 53C20, 53C21 Library of Congress Control Number: 2005048111 ISBN-10 0-8176-4384-2 eISBN 0-8176-4402-4 ISBN-13 978-0-8176-4384-3 Printed on acid-free paper. c 2006 Birkhauser¨ Boston All rights reserved. This work may not be translated or copied in whole or in part without the writ- ten permission of the publisher (Birkhauser¨ Boston, c/o Springer Science+Business Media Inc., 233 Spring Street, New York, NY 10013, USA) and the author, except for brief excerpts in connection with reviews or scholarly analysis. Use in connection with any form of information storage and re- trieval, electronic adaptation, computer software, or by similar or dissimilar methodology now known or hereafter developed is forbidden. The use in this publication of trade names, trademarks, service marks and similar terms, even if they are not identified as such, is not to be taken as an expression of opinion as to whether or not they are subject to proprietary rights. Printed in the United States of America. (TXQ/EB) 987654321 www.birkhauser.com Contents Preface ....................................................... vii About the Author ............................................. -

An Approach on Simulation of Involute Tooth Profile Used on Cylindrical Gears
BULETINUL INSTITUTULUI POLITEHNIC DIN IAŞI Publicat de Universitatea Tehnică „Gheorghe Asachi” din Iaşi Volumul 66 (70), Numărul 2, 2020 Secţia CONSTRUCŢII DE MAŞINI AN APPROACH ON SIMULATION OF INVOLUTE TOOTH PROFILE USED ON CYLINDRICAL GEARS BY MIHĂIȚĂ HORODINCĂ “Gheorghe Asachi” Technical University of Iaşi, Faculty of Machine Manufacturing and Industrial Management Received: April 6, 2020 Accepted for publication: June 10, 2020 Abstract. Some results on theoretical approach related by simulation of 2D involute tooth profiles on spur gears, based on rolling of a mobile generating rack around a fixed pitch circle are presented in this paper. A first main approach proves that the geometrical depiction of each generating rack position during rolling can be determined by means of a mathematical model which allows the calculus of Cartesian coordinates for some significant points placed on the rack. The 2D involute tooth profile appears to be the internal envelope bordered by plenty of different equidistant positions of the generating rack during a complete rolling. A second main approach allows the detection of Cartesian coordinates of this internal envelope as the best approximation of 2D involute tooth profile. This paper intends to provide a way for a better understanding of involute tooth profile generation procedure. Keywords: tooth profile; involute; generating rack; simulation. 1. Introduction Gear manufacturing is a major topic in industry due to a large scale utilization of gears for motion transmissions and speed reducers. Commonly the flank gear surface on cylindrical toothed wheels (gears) is described by two Corresponding author: e-mail: [email protected] 22 Mihăiţă Horodincă orthogonally curves: an involute as flank line (in a transverse plane) and a profile line. -

Evolute-Involute Partner Curves According to Darboux Frame in the Euclidean 3-Space E3
Fundamentals of Contemporary Mathematical Sciences (2020) 1(2) 63 { 70 Evolute-Involute Partner Curves According to Darboux Frame in the Euclidean 3-space E3 Abdullah Yıldırım 1,∗ Feryat Kaya 2 1 Harran University, Faculty of Arts and Sciences, Department of Mathematics S¸anlıurfa, T¨urkiye 2 S¸ehit Abdulkadir O˘guzAnatolian Imam Hatip High School S¸anlıurfa, T¨urkiye, [email protected] Received: 29 February 2020 Accepted: 29 June 2020 Abstract: In this study, evolute-involute curves are researched. Characterization of evolute-involute curves lying on the surface are examined according to Darboux frame and some curves are obtained. Keywords: Curve, surface, geodesic, curvature, frame. 1. Introduction The interest of special curves has increased recently. Some of these are associated curves. They are curves where one of the Frenet vectors at opposite points is linearly dependent to the other curve. One of the best examples of these curves is the evolute-involute partner curves. An involute thought known to have been used in his optical work came up in 1658 by C. Huygens. C. Huygens discovered involute curves while trying to make more accurate measurement studies [5]. Many researches have been conducted about evolute-involute partner curves. Some of them conducted recently are Bilici and C¸alı¸skan [4], Ozyılmaz¨ and Yılmaz [9], As and Sarıo˘glugil[2]. Bekta¸sand Y¨uceconsider the notion of the involute-evolute curves lying on the surfaces for a special situation. They determine the special involute-evolute partner D−curves in E3: By using the Darboux frame of the curves they obtain the necessary and sufficient conditions between κg , ∗ − ∗ ∗ τg; κn and κn for a curve to be the special involute partner D curve. -
On the Topology of Hypocycloid Curves
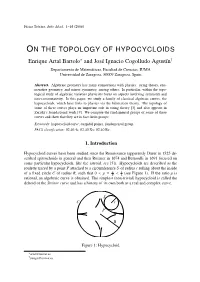
Física Teórica, Julio Abad, 1–16 (2008) ON THE TOPOLOGY OF HYPOCYCLOIDS Enrique Artal Bartolo∗ and José Ignacio Cogolludo Agustíny Departamento de Matemáticas, Facultad de Ciencias, IUMA Universidad de Zaragoza, 50009 Zaragoza, Spain Abstract. Algebraic geometry has many connections with physics: string theory, enu- merative geometry, and mirror symmetry, among others. In particular, within the topo- logical study of algebraic varieties physicists focus on aspects involving symmetry and non-commutativity. In this paper, we study a family of classical algebraic curves, the hypocycloids, which have links to physics via the bifurcation theory. The topology of some of these curves plays an important role in string theory [3] and also appears in Zariski’s foundational work [9]. We compute the fundamental groups of some of these curves and show that they are in fact Artin groups. Keywords: hypocycloid curve, cuspidal points, fundamental group. PACS classification: 02.40.-k; 02.40.Xx; 02.40.Re . 1. Introduction Hypocycloid curves have been studied since the Renaissance (apparently Dürer in 1525 de- scribed epitrochoids in general and then Roemer in 1674 and Bernoulli in 1691 focused on some particular hypocycloids, like the astroid, see [5]). Hypocycloids are described as the roulette traced by a point P attached to a circumference S of radius r rolling about the inside r 1 of a fixed circle C of radius R, such that 0 < ρ = R < 2 (see Figure 1). If the ratio ρ is rational, an algebraic curve is obtained. The simplest (non-trivial) hypocycloid is called the deltoid or the Steiner curve and has a history of its own both as a real and complex curve. -

Computer-Aided Design and Kinematic Simulation of Huygens's
applied sciences Article Computer-Aided Design and Kinematic Simulation of Huygens’s Pendulum Clock Gloria Del Río-Cidoncha 1, José Ignacio Rojas-Sola 2,* and Francisco Javier González-Cabanes 3 1 Department of Engineering Graphics, University of Seville, 41092 Seville, Spain; [email protected] 2 Department of Engineering Graphics, Design, and Projects, University of Jaen, 23071 Jaen, Spain 3 University of Seville, 41092 Seville, Spain; [email protected] * Correspondence: [email protected]; Tel.: +34-953-212452 Received: 25 November 2019; Accepted: 9 January 2020; Published: 10 January 2020 Abstract: This article presents both the three-dimensional modelling of the isochronous pendulum clock and the simulation of its movement, as designed by the Dutch physicist, mathematician, and astronomer Christiaan Huygens, and published in 1673. This invention was chosen for this research not only due to the major technological advance that it represented as the first reliable meter of time, but also for its historical interest, since this timepiece embodied the theory of pendular movement enunciated by Huygens, which remains in force today. This 3D modelling is based on the information provided in the only plan of assembly found as an illustration in the book Horologium Oscillatorium, whereby each of its pieces has been sized and modelled, its final assembly has been carried out, and its operation has been correctly verified by means of CATIA V5 software. Likewise, the kinematic simulation of the pendulum has been carried out, following the approximation of the string by a simple chain of seven links as a composite pendulum. The results have demonstrated the exactitude of the clock. -

Around and Around ______
Andrew Glassner’s Notebook http://www.glassner.com Around and around ________________________________ Andrew verybody loves making pictures with a Spirograph. The result is a pretty, swirly design, like the pictures Glassner EThis wonderful toy was introduced in 1966 by Kenner in Figure 1. Products and is now manufactured and sold by Hasbro. I got to thinking about this toy recently, and wondered The basic idea is simplicity itself. The box contains what might happen if we used other shapes for the a collection of plastic gears of different sizes. Every pieces, rather than circles. I wrote a program that pro- gear has several holes drilled into it, each big enough duces Spirograph-like patterns using shapes built out of to accommodate a pen tip. The box also contains some Bezier curves. I’ll describe that later on, but let’s start by rings that have gear teeth on both their inner and looking at traditional Spirograph patterns. outer edges. To make a picture, you select a gear and set it snugly against one of the rings (either inside or Roulettes outside) so that the teeth are engaged. Put a pen into Spirograph produces planar curves that are known as one of the holes, and start going around and around. roulettes. A roulette is defined by Lawrence this way: “If a curve C1 rolls, without slipping, along another fixed curve C2, any fixed point P attached to C1 describes a roulette” (see the “Further Reading” sidebar for this and other references). The word trochoid is a synonym for roulette. From here on, I’ll refer to C1 as the wheel and C2 as 1 Several the frame, even when the shapes Spirograph- aren’t circular. -

Some Curves and the Lengths of Their Arcs Amelia Carolina Sparavigna
Some Curves and the Lengths of their Arcs Amelia Carolina Sparavigna To cite this version: Amelia Carolina Sparavigna. Some Curves and the Lengths of their Arcs. 2021. hal-03236909 HAL Id: hal-03236909 https://hal.archives-ouvertes.fr/hal-03236909 Preprint submitted on 26 May 2021 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. Some Curves and the Lengths of their Arcs Amelia Carolina Sparavigna Department of Applied Science and Technology Politecnico di Torino Here we consider some problems from the Finkel's solution book, concerning the length of curves. The curves are Cissoid of Diocles, Conchoid of Nicomedes, Lemniscate of Bernoulli, Versiera of Agnesi, Limaçon, Quadratrix, Spiral of Archimedes, Reciprocal or Hyperbolic spiral, the Lituus, Logarithmic spiral, Curve of Pursuit, a curve on the cone and the Loxodrome. The Versiera will be discussed in detail and the link of its name to the Versine function. Torino, 2 May 2021, DOI: 10.5281/zenodo.4732881 Here we consider some of the problems propose in the Finkel's solution book, having the full title: A mathematical solution book containing systematic solutions of many of the most difficult problems, Taken from the Leading Authors on Arithmetic and Algebra, Many Problems and Solutions from Geometry, Trigonometry and Calculus, Many Problems and Solutions from the Leading Mathematical Journals of the United States, and Many Original Problems and Solutions. -

Strophoids, a Family of Cubic Curves with Remarkable Properties
Hellmuth STACHEL STROPHOIDS, A FAMILY OF CUBIC CURVES WITH REMARKABLE PROPERTIES Abstract: Strophoids are circular cubic curves which have a node with orthogonal tangents. These rational curves are characterized by a series or properties, and they show up as locus of points at various geometric problems in the Euclidean plane: Strophoids are pedal curves of parabolas if the corresponding pole lies on the parabola’s directrix, and they are inverse to equilateral hyperbolas. Strophoids are focal curves of particular pencils of conics. Moreover, the locus of points where tangents through a given point contact the conics of a confocal family is a strophoid. In descriptive geometry, strophoids appear as perspective views of particular curves of intersection, e.g., of Viviani’s curve. Bricard’s flexible octahedra of type 3 admit two flat poses; and here, after fixing two opposite vertices, strophoids are the locus for the four remaining vertices. In plane kinematics they are the circle-point curves, i.e., the locus of points whose trajectories have instantaneously a stationary curvature. Moreover, they are projections of the spherical and hyperbolic analogues. For any given triangle ABC, the equicevian cubics are strophoids, i.e., the locus of points for which two of the three cevians have the same lengths. On each strophoid there is a symmetric relation of points, so-called ‘associated’ points, with a series of properties: The lines connecting associated points P and P’ are tangent of the negative pedal curve. Tangents at associated points intersect at a point which again lies on the cubic. For all pairs (P, P’) of associated points, the midpoints lie on a line through the node N. -

The Pope's Rhinoceros and Quantum Mechanics
Bowling Green State University ScholarWorks@BGSU Honors Projects Honors College Spring 4-30-2018 The Pope's Rhinoceros and Quantum Mechanics Michael Gulas [email protected] Follow this and additional works at: https://scholarworks.bgsu.edu/honorsprojects Part of the Mathematics Commons, Ordinary Differential Equations and Applied Dynamics Commons, Other Applied Mathematics Commons, Partial Differential Equations Commons, and the Physics Commons Repository Citation Gulas, Michael, "The Pope's Rhinoceros and Quantum Mechanics" (2018). Honors Projects. 343. https://scholarworks.bgsu.edu/honorsprojects/343 This work is brought to you for free and open access by the Honors College at ScholarWorks@BGSU. It has been accepted for inclusion in Honors Projects by an authorized administrator of ScholarWorks@BGSU. The Pope’s Rhinoceros and Quantum Mechanics Michael Gulas Honors Project Submitted to the Honors College at Bowling Green State University in partial fulfillment of the requirements for graduation with University Honors May 2018 Dr. Steven Seubert Dept. of Mathematics and Statistics, Advisor Dr. Marco Nardone Dept. of Physics and Astronomy, Advisor Contents 1 Abstract 5 2 Classical Mechanics7 2.1 Brachistochrone....................................... 7 2.2 Laplace Transforms..................................... 10 2.2.1 Convolution..................................... 14 2.2.2 Laplace Transform Table.............................. 15 2.2.3 Inverse Laplace Transforms ............................ 15 2.3 Solving Differential Equations Using Laplace -

The Fractal Theory of the Saturn Ring
523.46/.481 THE FRACTAL THEORY OF THE SATURN RING M.I.Zelikin Abstract The true reason for partition of the Saturn ring as well as rings of other plan- ets into great many of sub-rings is found. This reason is the theorem of Zelikin- Lokutsievskiy-Hildebrand about fractal structure of solutions to generic piece-wise smooth Hamiltonian systems. The instability of two-dimensional model of rings with continues surface density of particles distribution is proved both for Newtonian and for Boltzmann equations. We do not claim that we have solved the problem of stability of Saturn ring. We rather put questions and suggest some ideas and means for researches. 1 Introduction Up to the middle of XX century the astronomy went hand in hand with mathematics. So, it is no wonder that such seemingly purely astronomical problems as figures of equilibrium for rotating, gravitating liquids or the stability of Saturn Ring came to the attention of the most part of outstanding mathematicians. It will be suffice to mention Galilei, Huygens, Newton, Laplace, Maclaurin, Maupertuis, Clairaut, d’Alembert, Legendre, Liouville, Ja- cobi, Riemann, Poincar´e, Chebyshev, Lyapunov, Cartan and numerous others (see, for example, [1]). It is pertinent to recall the out of sight discussion between Poincar´eand Lyapunov regarding figures of equilibrium for rotating, gravitating liquids. Poincar´e, who obtained his results using not so rigorous reasoning and often by simple analogy, wrote, “It is possible to make many objections, but the same rigor as in pure analysis is not de- manded in mechanics”. Lyapunov had entirely different position: “It is impermissible to use doubtful reasonings when solving a problem in mechanics or physics (it is the same) if it is formulated quite definitely as a mathematical one. -

The Cycloid Scott Morrison
The cycloid Scott Morrison “The time has come”, the old man said, “to talk of many things: Of tangents, cusps and evolutes, of curves and rolling rings, and why the cycloid’s tautochrone, and pendulums on strings.” October 1997 1 Everyone is well aware of the fact that pendulums are used to keep time in old clocks, and most would be aware that this is because even as the pendu- lum loses energy, and winds down, it still keeps time fairly well. It should be clear from the outset that a pendulum is basically an object moving back and forth tracing out a circle; hence, we can ignore the string or shaft, or whatever, that supports the bob, and only consider the circular motion of the bob, driven by gravity. It’s important to notice now that the angle the tangent to the circle makes with the horizontal is the same as the angle the line from the bob to the centre makes with the vertical. The force on the bob at any moment is propor- tional to the sine of the angle at which the bob is currently moving. The net force is also directed perpendicular to the string, that is, in the instantaneous direction of motion. Because this force only changes the angle of the bob, and not the radius of the movement (a pendulum bob is always the same distance from its fixed point), we can write: θθ&& ∝sin Now, if θ is always small, which means the pendulum isn’t moving much, then sinθθ≈. This is very useful, as it lets us claim: θθ&& ∝ which tells us we have simple harmonic motion going on. -
Strophoids, a Family of Cubic Curves with Remarkable Properties
Strophoids, a family of cubic curves with remarkable properties Hellmuth Stachel [email protected] — http://www.geometrie.tuwien.ac.at/stachel 6th International Conference on Engineering Graphics and Design University Transilvania, June 11–13, Brasov/Romania Table of contents 1. Definition of Strophoids 2. Associated Points 3. Strophoids as a Geometric Locus June 12, 2015: 6th Internat. Conference on Engineering Graphics and Design, Brasov/Romania 1/29 replacements 1. Definition of Strophoids ′ F Definition: An irreducible cubic is called circular if it passes through the absolute circle-points. asymptote A circular cubic is called strophoid ′ if it has a double point (= node) with G orthogonal tangents. F g A strophoid without an axis of y G symmetry is called oblique, other- wise right. S S : (x 2 + y 2)(ax + by) − xy =0 with a, b ∈ R, (a, b) =6 (0, 0). In x N fact, S intersects the line at infinity at (0 : 1 : ±i) and (0 : b : −a). June 12, 2015: 6th Internat. Conference on Engineering Graphics and Design, Brasov/Romania 2/29 1. Definition of Strophoids F ′ The line through N with inclination angle ϕ intersects S in the point asymptote 2 2 ′ sϕ c ϕ s ϕ cϕ G X = , . a cϕ + b sϕ a cϕ + b sϕ F g y G X This yields a parametrization of S. S ϕ = ±45◦ gives the points G, G′. ϕ The tangents at the absolute circle- N x points intersect in the focus F . June 12, 2015: 6th Internat. Conference on Engineering Graphics and Design, Brasov/Romania 3/29 1.