Computer-Aided Design and Kinematic Simulation of Huygens's
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

The Swinging Spring: Regular and Chaotic Motion
References The Swinging Spring: Regular and Chaotic Motion Leah Ganis May 30th, 2013 Leah Ganis The Swinging Spring: Regular and Chaotic Motion References Outline of Talk I Introduction to Problem I The Basics: Hamiltonian, Equations of Motion, Fixed Points, Stability I Linear Modes I The Progressing Ellipse and Other Regular Motions I Chaotic Motion I References Leah Ganis The Swinging Spring: Regular and Chaotic Motion References Introduction The swinging spring, or elastic pendulum, is a simple mechanical system in which many different types of motion can occur. The system is comprised of a heavy mass, attached to an essentially massless spring which does not deform. The system moves under the force of gravity and in accordance with Hooke's Law. z y r φ x k m Leah Ganis The Swinging Spring: Regular and Chaotic Motion References The Basics We can write down the equations of motion by finding the Lagrangian of the system and using the Euler-Lagrange equations. The Lagrangian, L is given by L = T − V where T is the kinetic energy of the system and V is the potential energy. Leah Ganis The Swinging Spring: Regular and Chaotic Motion References The Basics In Cartesian coordinates, the kinetic energy is given by the following: 1 T = m(_x2 +y _ 2 +z _2) 2 and the potential is given by the sum of gravitational potential and the spring potential: 1 V = mgz + k(r − l )2 2 0 where m is the mass, g is the gravitational constant, k the spring constant, r the stretched length of the spring (px2 + y 2 + z2), and l0 the unstretched length of the spring. -
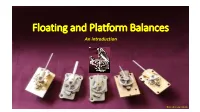
Floating and Platform Balances an Introduction
Floating and Platform Balances An introduction ©Darrah Artzner 3/2018 Floating and Platform Balances • Introduce main types • Discuss each in some detail including part identification and function • Testing and Inspecting • Cleaning tips • Lubrication • Performing repairs Balance Assembly Type Floating Platform Floating Balance Frame Spring stud Helicoid spring Hollow Tube Mounting Post Regulator Balance wheel Floating Balance cont. Jewel Roller Pin Paired weight Hollow Tube Safety Roller Pivot Wire Floating Balance cont. Example Retaining Hermle screws Safety Roller Note: moving fork Jewel cover Floating Balance cont. Inspecting and Testing (Balance assembly is removed from movement) • Inspect pivot (suspension) wire for distortion, corrosion, breakage. • Balance should appear to float between frame. Top and bottom distance. • Balance spring should be proportional and not distorted in any way. • Inspect jewels for cracks and or breakage. • Roller pin should be centered when viewed from front. (beat) • Rotate balance wheel three quarters of a turn (270°) and release. It should rotate smoothly with no distortion and should oscillate for several (3) minutes. Otherwise it needs attention. Floating Balance cont. Cleaning • Make sure the main spring has been let down before working on movement. • Use non-aqueous watch cleaner and/or rinse. • Agitate in cleaner/rinse by hand or briefly in ultrasonic. • Rinse twice and final in naphtha, Coleman fuel (or similar) or alcohol. • Allow to dry. (heat can be used with caution – ask me how I would do it.) Lubrication • There are two opinions. To lube or not to lube. • Place a vary small amount of watch oil on to the upper and lower jewel where the pivot wire passed through the jewel holes. -

Dynamics of the Elastic Pendulum Qisong Xiao; Shenghao Xia ; Corey Zammit; Nirantha Balagopal; Zijun Li Agenda
Dynamics of the Elastic Pendulum Qisong Xiao; Shenghao Xia ; Corey Zammit; Nirantha Balagopal; Zijun Li Agenda • Introduction to the elastic pendulum problem • Derivations of the equations of motion • Real-life examples of an elastic pendulum • Trivial cases & equilibrium states • MATLAB models The Elastic Problem (Simple Harmonic Motion) 푑2푥 푑2푥 푘 • 퐹 = 푚 = −푘푥 = − 푥 푛푒푡 푑푡2 푑푡2 푚 • Solve this differential equation to find 푥 푡 = 푐1 cos 휔푡 + 푐2 sin 휔푡 = 퐴푐표푠(휔푡 − 휑) • With velocity and acceleration 푣 푡 = −퐴휔 sin 휔푡 + 휑 푎 푡 = −퐴휔2cos(휔푡 + 휑) • Total energy of the system 퐸 = 퐾 푡 + 푈 푡 1 1 1 = 푚푣푡2 + 푘푥2 = 푘퐴2 2 2 2 The Pendulum Problem (with some assumptions) • With position vector of point mass 푥 = 푙 푠푖푛휃푖 − 푐표푠휃푗 , define 푟 such that 푥 = 푙푟 and 휃 = 푐표푠휃푖 + 푠푖푛휃푗 • Find the first and second derivatives of the position vector: 푑푥 푑휃 = 푙 휃 푑푡 푑푡 2 푑2푥 푑2휃 푑휃 = 푙 휃 − 푙 푟 푑푡2 푑푡2 푑푡 • From Newton’s Law, (neglecting frictional force) 푑2푥 푚 = 퐹 + 퐹 푑푡2 푔 푡 The Pendulum Problem (with some assumptions) Defining force of gravity as 퐹푔 = −푚푔푗 = 푚푔푐표푠휃푟 − 푚푔푠푖푛휃휃 and tension of the string as 퐹푡 = −푇푟 : 2 푑휃 −푚푙 = 푚푔푐표푠휃 − 푇 푑푡 푑2휃 푚푙 = −푚푔푠푖푛휃 푑푡2 Define 휔0 = 푔/푙 to find the solution: 푑2휃 푔 = − 푠푖푛휃 = −휔2푠푖푛휃 푑푡2 푙 0 Derivation of Equations of Motion • m = pendulum mass • mspring = spring mass • l = unstreatched spring length • k = spring constant • g = acceleration due to gravity • Ft = pre-tension of spring 푚푔−퐹 • r = static spring stretch, 푟 = 푡 s 푠 푘 • rd = dynamic spring stretch • r = total spring stretch 푟푠 + 푟푑 Derivation of Equations of Motion -

Pioneers in Optics: Christiaan Huygens
Downloaded from Microscopy Pioneers https://www.cambridge.org/core Pioneers in Optics: Christiaan Huygens Eric Clark From the website Molecular Expressions created by the late Michael Davidson and now maintained by Eric Clark, National Magnetic Field Laboratory, Florida State University, Tallahassee, FL 32306 . IP address: [email protected] 170.106.33.22 Christiaan Huygens reliability and accuracy. The first watch using this principle (1629–1695) was finished in 1675, whereupon it was promptly presented , on Christiaan Huygens was a to his sponsor, King Louis XIV. 29 Sep 2021 at 16:11:10 brilliant Dutch mathematician, In 1681, Huygens returned to Holland where he began physicist, and astronomer who lived to construct optical lenses with extremely large focal lengths, during the seventeenth century, a which were eventually presented to the Royal Society of period sometimes referred to as the London, where they remain today. Continuing along this line Scientific Revolution. Huygens, a of work, Huygens perfected his skills in lens grinding and highly gifted theoretical and experi- subsequently invented the achromatic eyepiece that bears his , subject to the Cambridge Core terms of use, available at mental scientist, is best known name and is still in widespread use today. for his work on the theories of Huygens left Holland in 1689, and ventured to London centrifugal force, the wave theory of where he became acquainted with Sir Isaac Newton and began light, and the pendulum clock. to study Newton’s theories on classical physics. Although it At an early age, Huygens began seems Huygens was duly impressed with Newton’s work, he work in advanced mathematics was still very skeptical about any theory that did not explain by attempting to disprove several theories established by gravitation by mechanical means. -

Differential Geometry
Differential Geometry J.B. Cooper 1995 Inhaltsverzeichnis 1 CURVES AND SURFACES—INFORMAL DISCUSSION 2 1.1 Surfaces ................................ 13 2 CURVES IN THE PLANE 16 3 CURVES IN SPACE 29 4 CONSTRUCTION OF CURVES 35 5 SURFACES IN SPACE 41 6 DIFFERENTIABLEMANIFOLDS 59 6.1 Riemannmanifolds .......................... 69 1 1 CURVES AND SURFACES—INFORMAL DISCUSSION We begin with an informal discussion of curves and surfaces, concentrating on methods of describing them. We shall illustrate these with examples of classical curves and surfaces which, we hope, will give more content to the material of the following chapters. In these, we will bring a more rigorous approach. Curves in R2 are usually specified in one of two ways, the direct or parametric representation and the implicit representation. For example, straight lines have a direct representation as tx + (1 t)y : t R { − ∈ } i.e. as the range of the function φ : t tx + (1 t)y → − (here x and y are distinct points on the line) and an implicit representation: (ξ ,ξ ): aξ + bξ + c =0 { 1 2 1 2 } (where a2 + b2 = 0) as the zero set of the function f(ξ ,ξ )= aξ + bξ c. 1 2 1 2 − Similarly, the unit circle has a direct representation (cos t, sin t): t [0, 2π[ { ∈ } as the range of the function t (cos t, sin t) and an implicit representation x : 2 2 → 2 2 { ξ1 + ξ2 =1 as the set of zeros of the function f(x)= ξ1 + ξ2 1. We see from} these examples that the direct representation− displays the curve as the image of a suitable function from R (or a subset thereof, usually an in- terval) into two dimensional space, R2. -

On the Isochronism of Galilei's Horologium
IFToMM Workshop on History of MMS – Palermo 2013 On the isochronism of Galilei's horologium Francesco Sorge, Marco Cammalleri, Giuseppe Genchi DICGIM, Università di Palermo, [email protected], [email protected], [email protected] Abstract − Measuring the passage of time has always fascinated the humankind throughout the centuries. It is amazing how the general architecture of clocks has remained almost unchanged in practice to date from the Middle Ages. However, the foremost mechanical developments in clock-making date from the seventeenth century, when the discovery of the isochronism laws of pendular motion by Galilei and Huygens permitted a higher degree of accuracy in the time measure. Keywords: Time Measure, Pendulum, Isochronism Brief Survey on the Art of Clock-Making The first elements of temporal and spatial cognition among the primitive societies were associated with the course of natural events. In practice, the starry heaven played the role of the first huge clock of mankind. According to the philosopher Macrobius (4 th century), even the Latin term hora derives, through the Greek word ‘ώρα , from an Egyptian hieroglyph to be pronounced Heru or Horu , which was Latinized into Horus and was the name of the Egyptian deity of the sun and the sky, who was the son of Osiris and was often represented as a hawk, prince of the sky. Later on, the measure of time began to assume a rudimentary technical connotation and to benefit from the use of more or less ingenious devices. Various kinds of clocks developed to relatively high levels of accuracy through the Egyptian, Assyrian, Greek and Roman civilizations. -

Evolute-Involute Partner Curves According to Darboux Frame in the Euclidean 3-Space E3
Fundamentals of Contemporary Mathematical Sciences (2020) 1(2) 63 { 70 Evolute-Involute Partner Curves According to Darboux Frame in the Euclidean 3-space E3 Abdullah Yıldırım 1,∗ Feryat Kaya 2 1 Harran University, Faculty of Arts and Sciences, Department of Mathematics S¸anlıurfa, T¨urkiye 2 S¸ehit Abdulkadir O˘guzAnatolian Imam Hatip High School S¸anlıurfa, T¨urkiye, [email protected] Received: 29 February 2020 Accepted: 29 June 2020 Abstract: In this study, evolute-involute curves are researched. Characterization of evolute-involute curves lying on the surface are examined according to Darboux frame and some curves are obtained. Keywords: Curve, surface, geodesic, curvature, frame. 1. Introduction The interest of special curves has increased recently. Some of these are associated curves. They are curves where one of the Frenet vectors at opposite points is linearly dependent to the other curve. One of the best examples of these curves is the evolute-involute partner curves. An involute thought known to have been used in his optical work came up in 1658 by C. Huygens. C. Huygens discovered involute curves while trying to make more accurate measurement studies [5]. Many researches have been conducted about evolute-involute partner curves. Some of them conducted recently are Bilici and C¸alı¸skan [4], Ozyılmaz¨ and Yılmaz [9], As and Sarıo˘glugil[2]. Bekta¸sand Y¨uceconsider the notion of the involute-evolute curves lying on the surfaces for a special situation. They determine the special involute-evolute partner D−curves in E3: By using the Darboux frame of the curves they obtain the necessary and sufficient conditions between κg , ∗ − ∗ ∗ τg; κn and κn for a curve to be the special involute partner D curve. -

A Phenomenology of Galileo's Experiments with Pendulums
BJHS, Page 1 of 35. f British Society for the History of Science 2009 doi:10.1017/S0007087409990033 A phenomenology of Galileo’s experiments with pendulums PAOLO PALMIERI* Abstract. The paper reports new findings about Galileo’s experiments with pendulums and discusses their significance in the context of Galileo’s writings. The methodology is based on a phenomenological approach to Galileo’s experiments, supported by computer modelling and close analysis of extant textual evidence. This methodology has allowed the author to shed light on some puzzles that Galileo’s experiments have created for scholars. The pendulum was crucial throughout Galileo’s career. Its properties, with which he was fascinated from very early in his career, especially concern time. A 1602 letter is the earliest surviving document in which Galileo discusses the hypothesis of pendulum isochronism.1 In this letter Galileo claims that all pendulums are isochronous, and that he has long been trying to demonstrate isochronism mechanically, but that so far he has been unable to succeed. From 1602 onwards Galileo referred to pendulum isochronism as an admirable property but failed to demonstrate it. The pendulum is the most open-ended of Galileo’s artefacts. After working on my reconstructed pendulums for some time, I became convinced that the pendulum had the potential to allow Galileo to break new ground. But I also realized that its elusive nature sometimes threatened to undermine the progress Galileo was making on other fronts. It is this ambivalent nature that, I thought, might prove invaluable in trying to understand crucial aspects of Galileo’s innovative methodology. -

Sarlette Et Al
COMPARISON OF THE HUYGENS MISSION AND THE SM2 TEST FLIGHT FOR HUYGENS ATTITUDE RECONSTRUCTION(*) A. Sarlette(1), M. Pérez-Ayúcar, O. Witasse, J.-P. Lebreton Planetary Missions Division, Research and Scientific Support Department, ESTEC-ESA, Noordwijk, The Netherlands. Email: [email protected], [email protected], [email protected] (1) Stagiaire from February 1 to April 29; student at Liège University, Belgium. Email: [email protected] ABSTRACT 1. The SM2 probe characteristics The Huygens probe is the ESA’s main contribution to In agreement with its main purpose – performing a the Cassini/Huygens mission, carried out jointly by full system check of the Huygens descent sequence – NASA, ESA and ASI. It was designed to descend into the SM2 probe was a full scale model of the Huygens the atmosphere of Titan on January 14, 2005, probe, having the same inner and outer structure providing surface images and scientific data to study (except that the deploying booms of the HASI the ground and the atmosphere of Saturn’s largest instrument were not mounted on SM2), the same mass moon. and a similar balance. A complete description of the Huygens flight model system can be found in [1]. In the framework of the reconstruction of the probe’s motions during the descent based on the engineering All Descent Control SubSystem items (parachute data, additional information was needed to investigate system, mechanisms, pyro and command devices) were the attitude and an anomaly in the spin direction. provided according to expected flight standard; as the test flight was successful, only few differences actually Two years before the launch of the Cassini/Huygens exist at this level with respect to the Huygens probe. -

ALBERT VAN HELDEN + HUYGENS’S RING CASSINI’S DIVISION O & O SATURN’S CHILDREN
_ ALBERT VAN HELDEN + HUYGENS’S RING CASSINI’S DIVISION o & o SATURN’S CHILDREN )0g-_ DIBNER LIBRARY LECTURE , HUYGENS’S RING, CASSINI’S DIVISION & SATURN’S CHILDREN c !@ _+++++++++ l ++++++++++ _) _) _) _) _)HUYGENS’S RING, _)CASSINI’S DIVISION _) _)& _)SATURN’S CHILDREN _) _) _)DDDDD _) _) _)Albert van Helden _) _) _) , _) _) _)_ _) _) _) _) _) · _) _) _) ; {(((((((((QW(((((((((} , 20013–7012 Text Copyright ©2006 Albert van Helden. All rights reserved. A H is Professor Emeritus at Rice University and the Univer- HUYGENS’S RING, CASSINI’S DIVISION sity of Utrecht, Netherlands, where he resides and teaches on a regular basis. He received his B.S and M.S. from Stevens Institute of Technology, M.A. from the AND SATURN’S CHILDREN University of Michigan and Ph.D. from Imperial College, University of London. Van Helden is a renowned author who has published respected books and arti- cles about the history of science, including the translation of Galileo’s “Sidereus Nuncius” into English. He has numerous periodical contributions to his credit and has served on the editorial boards of Air and Space, 1990-present; Journal for the History of Astronomy, 1988-present; Isis, 1989–1994; and Tractrix, 1989–1995. During his tenure at Rice University (1970–2001), van Helden was instrumental in establishing the “Galileo Project,”a Web-based source of information on the life and work of Galileo Galilei and the science of his time. A native of the Netherlands, Professor van Helden returned to his homeland in 2001 to join the faculty of Utrecht University. -
Variation Analysis of Involute Spline Tooth Contact
Brigham Young University BYU ScholarsArchive Theses and Dissertations 2006-02-22 Variation Analysis of Involute Spline Tooth Contact Brian J. De Caires Brigham Young University - Provo Follow this and additional works at: https://scholarsarchive.byu.edu/etd Part of the Mechanical Engineering Commons BYU ScholarsArchive Citation De Caires, Brian J., "Variation Analysis of Involute Spline Tooth Contact" (2006). Theses and Dissertations. 375. https://scholarsarchive.byu.edu/etd/375 This Thesis is brought to you for free and open access by BYU ScholarsArchive. It has been accepted for inclusion in Theses and Dissertations by an authorized administrator of BYU ScholarsArchive. For more information, please contact [email protected], [email protected]. VARIATION ANALYSIS OF INVOLUTE SPLINE TOOTH CONTACT By Brian J. K. DeCaires A thesis submitted to the faculty of Brigham Young University in partial fulfillment of the requirements for the degree of Master of Science Department of Mechanical Engineering Brigham Young University April 2006 Copyright © 2006 Brian J. K. DeCaires All Rights Reserved BRIGHAM YOUNG UNIVERSITY GRADUATE COMMITTEE APPROVAL of a thesis submitted by Brian J. K. DeCaires This thesis has been read by each member of the following graduate committee and by majority vote has been found to be satisfactory. ___________________________ ______________________________________ Date Kenneth W. Chase, Chair ___________________________ ______________________________________ Date Carl D. Sorensen ___________________________ -

Precalculus Huygens Quiz Answers
Chapter Two Math History for Precalculus Christiaan Huygens 1. When did Huygens (HIE genz) live? 1629–1695 2. Where was he from? Holland (The Hague) 3. What was his marital status? lifelong bachelor 4. What was his most famous work and when was it published? Horologium Oscillatorium, 1673 This famous work discussed pendulum clocks. Pendulum motion is periodic and is described using trigonometric functions. The most important mathematical result in this work involves the study of a curve—the cycloid. He discovered a very important property of this curve. In later works he studied other important mathematical curves and their properties. Describe each curve below and explain what Huygens discovered about it. Curves Discovery 5. Cycloid Determined by a point on a It is the tautochrone (time needed for wheel as it rolls along the a ball to roll to lowest point is equal (level) ground regardless of starting point). 6. Catenary Determined by suspending a It is not a parabola. cable from two points 7. Cissoid Determined by secant It is rectifiable (found arc length segments of a circle formula). 8. Which of the three previous curves are functions? cycloid, catenary 9. Huygens wrote on the paraboloid, a surface formed by revolving a parabola about its axis. What did he discover? Its surface area 10. Huygens also wrote the first treatise on probability (following the correspondence of Pascal and Fermat). What concept did he contribute to this subject? expectation 11. Name some of his famous scientific theories. rings of Saturn (1654–1656, using his own improved telescope lenses); pendulum clocks (1658); wave theory of light (1678, 1690) 12.