Interactive Involute Gear Analysis and Tooth Profile Generation Using Working Model 2D
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Gears and Gearing Part 1 Types of Gears Types of Gears
Gears and Gearing Part 1 Types of Gears Types of Gears Spur Helical Bevel Worm Nomenclature of Spur-Gear Teeth Fig. 13–5 Shigley’s Mechanical Engineering Design Rack A rack is a spur gear with an pitch diameter of infinity. The sides of the teeth are straight lines making an angle to the line of centers equal to the pressure angle. Fig. 13–13 Shigley’s Mechanical Engineering Design Tooth Size, Diameter, Number of Teeth Shigley’s Mechanical Engineering Design Tooth Sizes in General Industrial Use Table 13–2 Shigley’s Mechanical Engineering Design How an Involute Gear Profile is constructed A1B1=A1A0, A2B2=2 A1A0 , etc Pressure Angle Φ has the values of 20° or 25 ° 14.5 ° has also been used. Gear profile is constructed from the base circle. Then additional clearance are given. Relation of Base Circle to Pressure Angle Fig. 13–10 Shigley’s Mechanical Engineering Design Standardized Tooth Systems: AGMA Standard Common pressure angles f : 20º and 25º Older pressure angle: 14 ½º Common face width: 35p F p p P 35 F PP Shigley’s Mechanical Engineering Design Gear Sources • Boston Gear • Martin Sprocket • W. M. Berg • Stock Drive Products …. Numerous others Shigley’s Mechanical Engineering Design Conjugate Action When surfaces roll/slide against each other and produce constant angular velocity ratio, they are said to have conjugate action. Can be accomplished if instant center of velocity between the two bodies remains stationary between the grounded instant centers. Fig. 13–6 Shigley’s Mechanical Engineering Design Fundamental Law of Gearing: The common normal of the tooth profiles at all points within the mesh must always pass through a fixed point on the line of the centers called pitch point. -

Evolute-Involute Partner Curves According to Darboux Frame in the Euclidean 3-Space E3
Fundamentals of Contemporary Mathematical Sciences (2020) 1(2) 63 { 70 Evolute-Involute Partner Curves According to Darboux Frame in the Euclidean 3-space E3 Abdullah Yıldırım 1,∗ Feryat Kaya 2 1 Harran University, Faculty of Arts and Sciences, Department of Mathematics S¸anlıurfa, T¨urkiye 2 S¸ehit Abdulkadir O˘guzAnatolian Imam Hatip High School S¸anlıurfa, T¨urkiye, [email protected] Received: 29 February 2020 Accepted: 29 June 2020 Abstract: In this study, evolute-involute curves are researched. Characterization of evolute-involute curves lying on the surface are examined according to Darboux frame and some curves are obtained. Keywords: Curve, surface, geodesic, curvature, frame. 1. Introduction The interest of special curves has increased recently. Some of these are associated curves. They are curves where one of the Frenet vectors at opposite points is linearly dependent to the other curve. One of the best examples of these curves is the evolute-involute partner curves. An involute thought known to have been used in his optical work came up in 1658 by C. Huygens. C. Huygens discovered involute curves while trying to make more accurate measurement studies [5]. Many researches have been conducted about evolute-involute partner curves. Some of them conducted recently are Bilici and C¸alı¸skan [4], Ozyılmaz¨ and Yılmaz [9], As and Sarıo˘glugil[2]. Bekta¸sand Y¨uceconsider the notion of the involute-evolute curves lying on the surfaces for a special situation. They determine the special involute-evolute partner D−curves in E3: By using the Darboux frame of the curves they obtain the necessary and sufficient conditions between κg , ∗ − ∗ ∗ τg; κn and κn for a curve to be the special involute partner D curve. -

Back to Basics
BACK TO BASICS. • • Gear Design National Broach and Machine Division ,of Lear Siegler, Inc. A gear can be defined as a toothed wheel which, when meshed with another toothed wheel with similar configura- tion, will transmit rotation from one shaft to another. Depending upon the type and accuracy of motion desired, the gears and the profiles of the gear teeth can be of almost any form. Gears come in all shapes and sizes from square to circular, elliptical to conical and from as small as a pinhead to as large asa house. They are used to provide positive transmis- sion of both motion and power. Most generally, gear teeth are equally spaced around the periphery of the gear. The original gear teeth were wooden pegs driven into the periphery of wooden wheels and driven by other wooden Fig. 1-2- The common normal of cycloidal gears is a. curve which varies wheels of similar construction ..As man's progress in the use from a maximum inclination with respect to the common tangent at the of gears, and the form of the gear teeth changed to suit the pitch point to coincidence with the direction of this tangent. For cycloidal gears rotating as shown here. the arc B'P is theArc of Approach, and the all; application. The contacting sides or profiles of the teeth PA, the Arc of Recess. changed in shape until eventually they became parts of regular curves which were easily defined. norma] of cydoidal gears isa curve, Fig. 1-2, which is not of To obtain correct tooth action, (constant instantaneous a fixed direction, but varies from. -

Computer-Aided Design and Kinematic Simulation of Huygens's
applied sciences Article Computer-Aided Design and Kinematic Simulation of Huygens’s Pendulum Clock Gloria Del Río-Cidoncha 1, José Ignacio Rojas-Sola 2,* and Francisco Javier González-Cabanes 3 1 Department of Engineering Graphics, University of Seville, 41092 Seville, Spain; [email protected] 2 Department of Engineering Graphics, Design, and Projects, University of Jaen, 23071 Jaen, Spain 3 University of Seville, 41092 Seville, Spain; [email protected] * Correspondence: [email protected]; Tel.: +34-953-212452 Received: 25 November 2019; Accepted: 9 January 2020; Published: 10 January 2020 Abstract: This article presents both the three-dimensional modelling of the isochronous pendulum clock and the simulation of its movement, as designed by the Dutch physicist, mathematician, and astronomer Christiaan Huygens, and published in 1673. This invention was chosen for this research not only due to the major technological advance that it represented as the first reliable meter of time, but also for its historical interest, since this timepiece embodied the theory of pendular movement enunciated by Huygens, which remains in force today. This 3D modelling is based on the information provided in the only plan of assembly found as an illustration in the book Horologium Oscillatorium, whereby each of its pieces has been sized and modelled, its final assembly has been carried out, and its operation has been correctly verified by means of CATIA V5 software. Likewise, the kinematic simulation of the pendulum has been carried out, following the approximation of the string by a simple chain of seven links as a composite pendulum. The results have demonstrated the exactitude of the clock. -
Variation Analysis of Involute Spline Tooth Contact
Brigham Young University BYU ScholarsArchive Theses and Dissertations 2006-02-22 Variation Analysis of Involute Spline Tooth Contact Brian J. De Caires Brigham Young University - Provo Follow this and additional works at: https://scholarsarchive.byu.edu/etd Part of the Mechanical Engineering Commons BYU ScholarsArchive Citation De Caires, Brian J., "Variation Analysis of Involute Spline Tooth Contact" (2006). Theses and Dissertations. 375. https://scholarsarchive.byu.edu/etd/375 This Thesis is brought to you for free and open access by BYU ScholarsArchive. It has been accepted for inclusion in Theses and Dissertations by an authorized administrator of BYU ScholarsArchive. For more information, please contact [email protected], [email protected]. VARIATION ANALYSIS OF INVOLUTE SPLINE TOOTH CONTACT By Brian J. K. DeCaires A thesis submitted to the faculty of Brigham Young University in partial fulfillment of the requirements for the degree of Master of Science Department of Mechanical Engineering Brigham Young University April 2006 Copyright © 2006 Brian J. K. DeCaires All Rights Reserved BRIGHAM YOUNG UNIVERSITY GRADUATE COMMITTEE APPROVAL of a thesis submitted by Brian J. K. DeCaires This thesis has been read by each member of the following graduate committee and by majority vote has been found to be satisfactory. ___________________________ ______________________________________ Date Kenneth W. Chase, Chair ___________________________ ______________________________________ Date Carl D. Sorensen ___________________________ -

Design of Involute Spur Gears with Asymmetric Teeth & Direct Gear
International Journal of Engineering Research & Technology (IJERT) ISSN: 2278-0181 Vol. 1 Issue 6, August - 2012 Design of Involute Spur Gears with Asymmetric teeth & Direct gear Design G. Gowtham krishna 1, K. Srinvas2,M.Suresh3 1.P.G.student,Dept. of Mechanical Engineering, DVR AND DHM college of Engineering and technology, Kanchikacherla, 521180,Krishna dt, A.P. 2.Associat.professor, Dept of Mechanical Engineering,DVR AND DHM college of Engineering and technology, Kanchikacherla, 521180,Krishna dt, A.P. 3.P.G.student,Dept. of Mechanical Engineering,BEC,Bapatla,Guntur,A.P. Abstract-- Design of gears with asymmetric teeth that production. • Gear grinding is adaptable to custom tooth shapes. enables to increase load capacity, reduce weight, size and • Metal and plastic gear molding cost largely does not depend vibration level. standard tool parameters and uses nonstandard on tooth shape. This article presents the direct gear design tooth shapes to provide required performance for a particular method, which separates gear geometry definition from tool custom application. This makes finite element analysis (FEA) selection, to achieve the best possible performance for a more preferable than the Lewis equation for bending stress particular product and application. definition. This paper does not describe the FEA application for comprehensive stress analysis of the gear teeth. It sents the engineering method for bending stress balance and minimization. Involute gear Introduction Conventional involute spur gears are designed with symmetric tooth side surfaces . It is well known that the conditions of load and meshing are different for drive and coast tooth's side. Application of asymmetric tooth side surfaces enables to increase the load capacity and durability for the drive tooth side. -

VIRTUAL HOBBING E. BERGSETH Department of Machine Design, KTH, Stockholm, Sweden SUMMARY Hobbing Is a Widely Used Machining Proc
VIRTUAL HOBBING E. BERGSETH Department of Machine Design, KTH, Stockholm, Sweden SUMMARY Hobbing is a widely used machining process to generate high precision external spur and helical gears. The life of the hob is determined by wear and other surface damage. In this report, a CAD approach is used to simulate the machining process of a gear tooth slot. Incremental removal of material is achieved by identifying contact lines. The paper presents an example of spur gear generation by means of an unworn and a worn hob. The two CAD-generated gear surfaces are compared and showed form deviations. Keywords: gear machining, CAD, simulation 1 INTRODUCTION analysis of the tolerances applied to gears, each step in the manufacturing process must be optimized. Better The quality and cost of high precision gears are aspects understanding of the geometrical variations would which are constantly of interest. Demands stemming facilitate tolerance decisions, and make it easier to from increasing environmental awareness, such as meet new demands. lower noise and improved gear efficiency, are added to traditional demands to create (MackAldener [1]) a Gear manufacturing consists of several operations; challenging task for both manufacturers and designers. table 1 shows an example of a gear manufacturing To be able to adjust to these demands, a design must be sequence for high precision external spur or helical robust; that is, it must deliver the target performance gears. regardless of any uncontrollable variations, for example manufacturing variations. Manufacturing variations can include geometrical variations caused by imperfections in the manufacturing process, for example, wear of tools. The geometrical deviations of each part must be limited by tolerances in order to ensure that the functional requirements are met. -
The Kinematics of Conical Involute Gear Hobbing
The Kinematics of Conical Involute Gear Hobbing Carlo Innocenti (This article fi rst appeared in the proceedings of IMECE2007, The technical literature contains plenty of information the 2007 ASME International Mechanical Engineering regarding the tooth fl ank geometry (Refs. 8–9) and the setting Congress and Exposition, November 11–15, 2007, Seattle, of a hobbing machine in order to generate a beveloid gear Washington, USA. It is reprinted here with permission.) (Refs. 10–15). Unfortunately, the formalism usually adopted makes determination of the hobbing parameters a rather involved process, mainly because the geometry of a beveloid Management Summary gear is customarily—though ineffi ciently—specifi ed by It is the intent of this presentation to determine all rigid-body positions of two conical involutes that resorting to the relative placement of the gear with respect mesh together, with no backlash. That information to the standard rack cutter that would generate the gear, even then serves to provide a simple, general approach in if the gear is to be generated by a different cutting tool. To arriving at two key setting parameters for a hobbing make things worse, some of the cited papers on beveloid gear machine when cutting a conical (beveloid) gear. hobbing are hard reading due to printing errors in formulae A numerical example will show application of the and fi gures. presented results in a case study scenario. Conical This paper presents an original method to compute the involute gears are commonly seen in gearboxes parameters that defi ne the relative movement of a hob with for medium-size marine applications—onboard respect to the beveloid gear being generated. -

Dynamic Behavior of Planetary Gears Dr.-Ing
TECHNICAL Dynamic Behavior of Planetary Gears Dr.-Ing. Burkhard Pinnekamp, Dr.-Ing. Michael Heider, and M.Sc. Andreas Beinstingel Introduction Besides power density, reliability and efficiency, noise is always an important criterion for a successful gear design. In many theoretical and experimental in- vestigations and papers, the influences and potential remedies were discussed. For example, in (Ref. 6) the importance of a large overlap ratio, achieved by a large helix angle is described as the most important factor for reducing gear noise. In planetary gear systems of high power density and high gear ratio, heli- cal gears create undesirable tilting mo- ments on the planet gears; therefore, Figure 1 Noise: generation, transmission and radiation. spur gears are still preferred for plan- etary gears — a special challenge with respect to noise. Specifically, the dif- ferent behavior of planetary gears with sequential and symmetric gear mesh is explained in this paper. As described (Ref. 10), the variable mesh stiffness along the path of con- tact in the tooth contact leads to oscil- lating forces on the shafts and bearings, which are transmitted to the casing. The casing vibrations radiate airborne noise (Fig. 1). The influence of tooth geometry on the excitation behavior is determined by the geometry parameters, such as Figure 2 Contributions to single tooth contact deflection along path of contact (Source: FZG TU Munich). profile and overlap ratios, flank modifi- cations and manufacturing deviations. For design to low noise emission, the knowledge of the elastic and dynamic behavior of the transmission system and the excitation mechanisms of the gear mesh is required. -

The Cycloid Scott Morrison
The cycloid Scott Morrison “The time has come”, the old man said, “to talk of many things: Of tangents, cusps and evolutes, of curves and rolling rings, and why the cycloid’s tautochrone, and pendulums on strings.” October 1997 1 Everyone is well aware of the fact that pendulums are used to keep time in old clocks, and most would be aware that this is because even as the pendu- lum loses energy, and winds down, it still keeps time fairly well. It should be clear from the outset that a pendulum is basically an object moving back and forth tracing out a circle; hence, we can ignore the string or shaft, or whatever, that supports the bob, and only consider the circular motion of the bob, driven by gravity. It’s important to notice now that the angle the tangent to the circle makes with the horizontal is the same as the angle the line from the bob to the centre makes with the vertical. The force on the bob at any moment is propor- tional to the sine of the angle at which the bob is currently moving. The net force is also directed perpendicular to the string, that is, in the instantaneous direction of motion. Because this force only changes the angle of the bob, and not the radius of the movement (a pendulum bob is always the same distance from its fixed point), we can write: θθ&& ∝sin Now, if θ is always small, which means the pendulum isn’t moving much, then sinθθ≈. This is very useful, as it lets us claim: θθ&& ∝ which tells us we have simple harmonic motion going on. -

A Tale of the Cycloid in Four Acts
A Tale of the Cycloid In Four Acts Carlo Margio Figure 1: A point on a wheel tracing a cycloid, from a work by Pascal in 16589. Introduction In the words of Mersenne, a cycloid is “the curve traced in space by a point on a carriage wheel as it revolves, moving forward on the street surface.” 1 This deceptively simple curve has a large number of remarkable and unique properties from an integral ratio of its length to the radius of the generating circle, and an integral ratio of its enclosed area to the area of the generating circle, as can be proven using geometry or basic calculus, to the advanced and unique tautochrone and brachistochrone properties, that are best shown using the calculus of variations. Thrown in to this assortment, a cycloid is the only curve that is its own involute. Study of the cycloid can reinforce the curriculum concepts of curve parameterisation, length of a curve, and the area under a parametric curve. Being mechanically generated, the cycloid also lends itself to practical demonstrations that help visualise these abstract concepts. The history of the curve is as enthralling as the mathematics, and involves many of the great European mathematicians of the seventeenth century (See Appendix I “Mathematicians and Timeline”). Introducing the cycloid through the persons involved in its discovery, and the struggles they underwent to get credit for their insights, not only gives sequence and order to the cycloid’s properties and shows which properties required advances in mathematics, but it also gives a human face to the mathematicians involved and makes them seem less remote, despite their, at times, seemingly superhuman discoveries. -
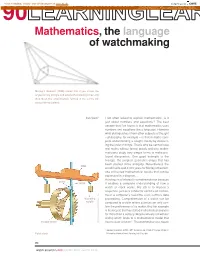
Mathematics, the Language of Watchmaking
View metadata, citation and similar papers at core.ac.uk brought to you by CORE 90LEARNINGprovidedL by Infoscience E- École polytechniqueA fédérale de LausanneRNINGLEARNINGLEARNING Mathematics, the language of watchmaking Morley’s theorem (1898) states that if you trisect the angles of any triangle and extend the trisecting lines until they meet, the small triangle formed in the centre will always be equilateral. Ilan Vardi 1 I am often asked to explain mathematics; is it just about numbers and equations? The best answer that I’ve found is that mathematics uses numbers and equations like a language. However what distinguishes it from other subjects of thought – philosophy, for example – is that in maths com- plete understanding is sought, mostly by discover- ing the order in things. That is why we cannot have real maths without formal proofs and why mathe- maticians study very simple forms to make pro- found discoveries. One good example is the triangle, the simplest geometric shape that has been studied since antiquity. Nevertheless the foliot world had to wait 2,000 years for Morley’s theorem, one of the few mathematical results that can be expressed in a diagram. Horology is of interest to a mathematician because pallet verge it enables a complete understanding of how a watch or clock works. His job is to impose a sequence, just as a conductor controls an orches- tra or a computer’s real-time clock controls data regulating processing. Comprehension of a watch can be weight compared to a violin where science can only con- firm the preferences of its maker.