The Pope's Rhinoceros and Quantum Mechanics
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Differential Geometry
Differential Geometry J.B. Cooper 1995 Inhaltsverzeichnis 1 CURVES AND SURFACES—INFORMAL DISCUSSION 2 1.1 Surfaces ................................ 13 2 CURVES IN THE PLANE 16 3 CURVES IN SPACE 29 4 CONSTRUCTION OF CURVES 35 5 SURFACES IN SPACE 41 6 DIFFERENTIABLEMANIFOLDS 59 6.1 Riemannmanifolds .......................... 69 1 1 CURVES AND SURFACES—INFORMAL DISCUSSION We begin with an informal discussion of curves and surfaces, concentrating on methods of describing them. We shall illustrate these with examples of classical curves and surfaces which, we hope, will give more content to the material of the following chapters. In these, we will bring a more rigorous approach. Curves in R2 are usually specified in one of two ways, the direct or parametric representation and the implicit representation. For example, straight lines have a direct representation as tx + (1 t)y : t R { − ∈ } i.e. as the range of the function φ : t tx + (1 t)y → − (here x and y are distinct points on the line) and an implicit representation: (ξ ,ξ ): aξ + bξ + c =0 { 1 2 1 2 } (where a2 + b2 = 0) as the zero set of the function f(ξ ,ξ )= aξ + bξ c. 1 2 1 2 − Similarly, the unit circle has a direct representation (cos t, sin t): t [0, 2π[ { ∈ } as the range of the function t (cos t, sin t) and an implicit representation x : 2 2 → 2 2 { ξ1 + ξ2 =1 as the set of zeros of the function f(x)= ξ1 + ξ2 1. We see from} these examples that the direct representation− displays the curve as the image of a suitable function from R (or a subset thereof, usually an in- terval) into two dimensional space, R2. -

Evolute-Involute Partner Curves According to Darboux Frame in the Euclidean 3-Space E3
Fundamentals of Contemporary Mathematical Sciences (2020) 1(2) 63 { 70 Evolute-Involute Partner Curves According to Darboux Frame in the Euclidean 3-space E3 Abdullah Yıldırım 1,∗ Feryat Kaya 2 1 Harran University, Faculty of Arts and Sciences, Department of Mathematics S¸anlıurfa, T¨urkiye 2 S¸ehit Abdulkadir O˘guzAnatolian Imam Hatip High School S¸anlıurfa, T¨urkiye, [email protected] Received: 29 February 2020 Accepted: 29 June 2020 Abstract: In this study, evolute-involute curves are researched. Characterization of evolute-involute curves lying on the surface are examined according to Darboux frame and some curves are obtained. Keywords: Curve, surface, geodesic, curvature, frame. 1. Introduction The interest of special curves has increased recently. Some of these are associated curves. They are curves where one of the Frenet vectors at opposite points is linearly dependent to the other curve. One of the best examples of these curves is the evolute-involute partner curves. An involute thought known to have been used in his optical work came up in 1658 by C. Huygens. C. Huygens discovered involute curves while trying to make more accurate measurement studies [5]. Many researches have been conducted about evolute-involute partner curves. Some of them conducted recently are Bilici and C¸alı¸skan [4], Ozyılmaz¨ and Yılmaz [9], As and Sarıo˘glugil[2]. Bekta¸sand Y¨uceconsider the notion of the involute-evolute curves lying on the surfaces for a special situation. They determine the special involute-evolute partner D−curves in E3: By using the Darboux frame of the curves they obtain the necessary and sufficient conditions between κg , ∗ − ∗ ∗ τg; κn and κn for a curve to be the special involute partner D curve. -

Computer-Aided Design and Kinematic Simulation of Huygens's
applied sciences Article Computer-Aided Design and Kinematic Simulation of Huygens’s Pendulum Clock Gloria Del Río-Cidoncha 1, José Ignacio Rojas-Sola 2,* and Francisco Javier González-Cabanes 3 1 Department of Engineering Graphics, University of Seville, 41092 Seville, Spain; [email protected] 2 Department of Engineering Graphics, Design, and Projects, University of Jaen, 23071 Jaen, Spain 3 University of Seville, 41092 Seville, Spain; [email protected] * Correspondence: [email protected]; Tel.: +34-953-212452 Received: 25 November 2019; Accepted: 9 January 2020; Published: 10 January 2020 Abstract: This article presents both the three-dimensional modelling of the isochronous pendulum clock and the simulation of its movement, as designed by the Dutch physicist, mathematician, and astronomer Christiaan Huygens, and published in 1673. This invention was chosen for this research not only due to the major technological advance that it represented as the first reliable meter of time, but also for its historical interest, since this timepiece embodied the theory of pendular movement enunciated by Huygens, which remains in force today. This 3D modelling is based on the information provided in the only plan of assembly found as an illustration in the book Horologium Oscillatorium, whereby each of its pieces has been sized and modelled, its final assembly has been carried out, and its operation has been correctly verified by means of CATIA V5 software. Likewise, the kinematic simulation of the pendulum has been carried out, following the approximation of the string by a simple chain of seven links as a composite pendulum. The results have demonstrated the exactitude of the clock. -

1 Functions, Derivatives, and Notation 2 Remarks on Leibniz Notation
ORDINARY DIFFERENTIAL EQUATIONS MATH 241 SPRING 2019 LECTURE NOTES M. P. COHEN CARLETON COLLEGE 1 Functions, Derivatives, and Notation A function, informally, is an input-output correspondence between values in a domain or input space, and values in a codomain or output space. When studying a particular function in this course, our domain will always be either a subset of the set of all real numbers, always denoted R, or a subset of n-dimensional Euclidean space, always denoted Rn. Formally, Rn is the set of all ordered n-tuples (x1; x2; :::; xn) where each of x1; x2; :::; xn is a real number. Our codomain will always be R, i.e. our functions under consideration will be real-valued. We will typically functions in two ways. If we wish to highlight the variable or input parameter, we will write a function using first a letter which represents the function, followed by one or more letters in parentheses which represent input variables. For example, we write f(x) or y(t) or F (x; y). In the first two examples above, we implicitly assume that the variables x and t vary over all possible inputs in the domain R, while in the third example we assume (x; y)p varies over all possible inputs in the domain R2. For some specific examples of functions, e.g. f(x) = x − 5, we assume that the domain includesp only real numbers x for which it makes sense to plug x into the formula, i.e., the domain of f(x) = x − 5 is just the interval [5; 1). -

The Fractal Theory of the Saturn Ring
523.46/.481 THE FRACTAL THEORY OF THE SATURN RING M.I.Zelikin Abstract The true reason for partition of the Saturn ring as well as rings of other plan- ets into great many of sub-rings is found. This reason is the theorem of Zelikin- Lokutsievskiy-Hildebrand about fractal structure of solutions to generic piece-wise smooth Hamiltonian systems. The instability of two-dimensional model of rings with continues surface density of particles distribution is proved both for Newtonian and for Boltzmann equations. We do not claim that we have solved the problem of stability of Saturn ring. We rather put questions and suggest some ideas and means for researches. 1 Introduction Up to the middle of XX century the astronomy went hand in hand with mathematics. So, it is no wonder that such seemingly purely astronomical problems as figures of equilibrium for rotating, gravitating liquids or the stability of Saturn Ring came to the attention of the most part of outstanding mathematicians. It will be suffice to mention Galilei, Huygens, Newton, Laplace, Maclaurin, Maupertuis, Clairaut, d’Alembert, Legendre, Liouville, Ja- cobi, Riemann, Poincar´e, Chebyshev, Lyapunov, Cartan and numerous others (see, for example, [1]). It is pertinent to recall the out of sight discussion between Poincar´eand Lyapunov regarding figures of equilibrium for rotating, gravitating liquids. Poincar´e, who obtained his results using not so rigorous reasoning and often by simple analogy, wrote, “It is possible to make many objections, but the same rigor as in pure analysis is not de- manded in mechanics”. Lyapunov had entirely different position: “It is impermissible to use doubtful reasonings when solving a problem in mechanics or physics (it is the same) if it is formulated quite definitely as a mathematical one. -

The Tautochrone/Brachistochrone Problems: How to Make the Period of a Pendulum Independent of Its Amplitude
The Tautochrone/Brachistochrone Problems: How to make the Period of a Pendulum independent of its Amplitude Tatsu Takeuchi∗ Department of Physics, Virginia Tech, Blacksburg VA 24061, USA (Dated: October 12, 2019) Demo presentation at the 2019 Fall Meeting of the Chesapeake Section of the American Associa- tion of Physics Teachers (CSAAPT). I. THE TAUTOCHRONE A. The Period of a Simple Pendulum In introductory physics, we teach our students that a simple pendulum is a harmonic oscillator, and that its angular frequency ! and period T are given by s rg 2π ` ! = ;T = = 2π ; (1) ` ! g where ` is the length of the pendulum. This, of course, is not quite true. The period actually depends on the amplitude of the pendulum's swing. 1. The Small-Angle Approximation Recall that the equation of motion for a simple pendulum is d2θ g = − sin θ : (2) dt2 ` (Note that the equation of motion of a mass sliding frictionlessly along a semi-circular track of radius ` is the same. See FIG. 1.) FIG. 1. The motion of the bob of a simple pendulum (left) is the same as that of a mass sliding frictionlessly along a semi-circular track (right). The tension in the string (left) is simply replaced by the normal force from the track (right). ∗ [email protected] CSAAPT 2019 Fall Meeting Demo { Tatsu Takeuchi, Virginia Tech Department of Physics 2 We need to make the small-angle approximation sin θ ≈ θ ; (3) to render the equation into harmonic oscillator form: d2θ rg ≈ −!2θ ; ! = ; (4) dt2 ` so that it can be solved to yield θ(t) ≈ A sin(!t) ; (5) where we have assumed that pendulum bob is at θ = 0 at time t = 0. -

The Cycloid Scott Morrison
The cycloid Scott Morrison “The time has come”, the old man said, “to talk of many things: Of tangents, cusps and evolutes, of curves and rolling rings, and why the cycloid’s tautochrone, and pendulums on strings.” October 1997 1 Everyone is well aware of the fact that pendulums are used to keep time in old clocks, and most would be aware that this is because even as the pendu- lum loses energy, and winds down, it still keeps time fairly well. It should be clear from the outset that a pendulum is basically an object moving back and forth tracing out a circle; hence, we can ignore the string or shaft, or whatever, that supports the bob, and only consider the circular motion of the bob, driven by gravity. It’s important to notice now that the angle the tangent to the circle makes with the horizontal is the same as the angle the line from the bob to the centre makes with the vertical. The force on the bob at any moment is propor- tional to the sine of the angle at which the bob is currently moving. The net force is also directed perpendicular to the string, that is, in the instantaneous direction of motion. Because this force only changes the angle of the bob, and not the radius of the movement (a pendulum bob is always the same distance from its fixed point), we can write: θθ&& ∝sin Now, if θ is always small, which means the pendulum isn’t moving much, then sinθθ≈. This is very useful, as it lets us claim: θθ&& ∝ which tells us we have simple harmonic motion going on. -

A Tale of the Cycloid in Four Acts
A Tale of the Cycloid In Four Acts Carlo Margio Figure 1: A point on a wheel tracing a cycloid, from a work by Pascal in 16589. Introduction In the words of Mersenne, a cycloid is “the curve traced in space by a point on a carriage wheel as it revolves, moving forward on the street surface.” 1 This deceptively simple curve has a large number of remarkable and unique properties from an integral ratio of its length to the radius of the generating circle, and an integral ratio of its enclosed area to the area of the generating circle, as can be proven using geometry or basic calculus, to the advanced and unique tautochrone and brachistochrone properties, that are best shown using the calculus of variations. Thrown in to this assortment, a cycloid is the only curve that is its own involute. Study of the cycloid can reinforce the curriculum concepts of curve parameterisation, length of a curve, and the area under a parametric curve. Being mechanically generated, the cycloid also lends itself to practical demonstrations that help visualise these abstract concepts. The history of the curve is as enthralling as the mathematics, and involves many of the great European mathematicians of the seventeenth century (See Appendix I “Mathematicians and Timeline”). Introducing the cycloid through the persons involved in its discovery, and the struggles they underwent to get credit for their insights, not only gives sequence and order to the cycloid’s properties and shows which properties required advances in mathematics, but it also gives a human face to the mathematicians involved and makes them seem less remote, despite their, at times, seemingly superhuman discoveries. -
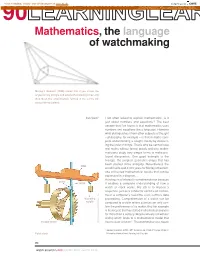
Mathematics, the Language of Watchmaking
View metadata, citation and similar papers at core.ac.uk brought to you by CORE 90LEARNINGprovidedL by Infoscience E- École polytechniqueA fédérale de LausanneRNINGLEARNINGLEARNING Mathematics, the language of watchmaking Morley’s theorem (1898) states that if you trisect the angles of any triangle and extend the trisecting lines until they meet, the small triangle formed in the centre will always be equilateral. Ilan Vardi 1 I am often asked to explain mathematics; is it just about numbers and equations? The best answer that I’ve found is that mathematics uses numbers and equations like a language. However what distinguishes it from other subjects of thought – philosophy, for example – is that in maths com- plete understanding is sought, mostly by discover- ing the order in things. That is why we cannot have real maths without formal proofs and why mathe- maticians study very simple forms to make pro- found discoveries. One good example is the triangle, the simplest geometric shape that has been studied since antiquity. Nevertheless the foliot world had to wait 2,000 years for Morley’s theorem, one of the few mathematical results that can be expressed in a diagram. Horology is of interest to a mathematician because pallet verge it enables a complete understanding of how a watch or clock works. His job is to impose a sequence, just as a conductor controls an orches- tra or a computer’s real-time clock controls data regulating processing. Comprehension of a watch can be weight compared to a violin where science can only con- firm the preferences of its maker. -

Publication Named Lunar Formations by Blagg and Müller (Published in 1935)
Lunar and Planetary Information Bulletin January 2018 • Issue 151 Contents Feature Story From the Desk of Jim Green News from Space Meeting Highlights Opportunities for Students Spotlight on Education In Memoriam Milestones New and Noteworthy Calendar Copyright 2018 The Lunar and Planetary Institute Issue 151 Page 2 of 76 January 2018 Feature Story Planetary Nomenclature: A Brief History and Overview Note from the Editors: This issue’s lead article is the ninth in a series of reports describing the history and current activities of the planetary research facilities partially funded by NASA and located nationwide. This issue provides a brief history and overview of planetary nomenclature, an important activity that provides structure and coordination to NASA’s planetary exploration program and the scientific analysis of planetary data. — Paul Schenk and Renée Dotson Humans have been naming the stars and planets for thousands of years, and many of these ancient names are still in use. For example, the Romans named the planet Mars for their god of war, and the satellites Phobos and Deimos, discovered in 1877, were named for the twin sons of Ares, the Greek god of war. In this age of orbiters, rovers, and high-resolution imagery, modern planetary nomenclature is used to uniquely identify a topographical, morphological, or albedo feature on the surface of a planet or satellite so that the feature can be easily located, described, and discussed by scientists and laypeople alike. History of Planetary Nomenclature With the invention of the telescope in 1608, astronomers from many countries began studying the Moon and other planetary bodies. -

LECTURE NOTES (SPRING 2012) 119B: ORDINARY DIFFERENTIAL EQUATIONS June 12, 2012 Contents Part 1. Hamiltonian and Lagrangian Mech
LECTURE NOTES (SPRING 2012) 119B: ORDINARY DIFFERENTIAL EQUATIONS DAN ROMIK DEPARTMENT OF MATHEMATICS, UC DAVIS June 12, 2012 Contents Part 1. Hamiltonian and Lagrangian mechanics 2 Part 2. Discrete-time dynamics, chaos and ergodic theory 44 Part 3. Control theory 66 Bibliographic notes 87 1 2 Part 1. Hamiltonian and Lagrangian mechanics 1.1. Introduction. Newton made the famous discovery that the mo- tion of physical bodies can be described by a second-order differential equation F = ma; where a is the acceleration (the second derivative of the position of the body), m is the mass, and F is the force, which has to be specified in order for the motion to be determined (for example, Newton's law of gravity gives a formula for the force F arising out of the gravitational influence of celestial bodies). The quantities F and a are vectors, but in simple problems where the motion is along only one axis can be taken as scalars. In the 18th and 19th centuries it was realized that Newton's equa- tions can be reformulated in two surprising ways. The new formula- tions, known as Lagrangian and Hamiltonian mechanics, make it eas- ier to analyze the behavior of certain mechanical systems, and also highlight important theoretical aspects of the behavior of such sys- tems which are not immediately apparent from the original Newtonian formulation. They also gave rise to an entirely new and highly use- ful branch of mathematics called the calculus of variations|a kind of \calculus on steroids" (see Section 1.10). Our goal in this chapter is to give an introduction to this deep and beautiful part of the theory of differential equations. -

Some Characterizations of Involute-Evolute Curve Couple In
Computa & tio d n ie a l l Abdel-Aziz et al., J Appl Computat Math 2019, 8:2 p M p a Journal of A t h f e o m l a a n t r ISSN: 2168-9679i c u s o J Applied & Computational Mathematics Research Article Open Access Some Characterizations of Involute-Evolute Curve Couple in the Hyperbolic Space Abdel-Aziz HS1*, Saad MK2 and Abdel-Salam AA1 1Department of Mathematics, Faculty of Science, Sohag University, 82524 Sohag, Egypt 2Department of Mathematics, Faculty of Science, Islamic University of Madinah, 170 Madinah, Saudi Arabia Abstract This paper aims to show that Frenet apparatus of an evolute curve can be formed according to apparatus of the involute curve in hyperbolic space. We establish relationships among Frenet frame on involute-evolute curve couple in hyperbolic 2-space, hyperbolic 3-space and de Sitter 3-space. Finally, we illustrate some numerical examples in support our main results. Keywords: Frenet frames; Involute-evolute curves; Hyperbolic equations and for more details see [1,6]. In this paper, we calculate space; De Sitter space. the Frenet apparatus of the evolute curve by apparatus of the involute curve in hyperbolic 2-space, hyperbolic 3-space, and de Sitter 3-space. Mathematics Subject Classification (2010). 53A25, 53C50. Our results can be seen as refinement and generalization of many Introduction corresponding results exist in the literature and useful in mathematical modeling and some other applications. The idea of a string involute is due to, who is also known for his work in optics [1]. He discovered involutes while trying to develop a Preliminaries more accurate clock [2].