1 Functions, Derivatives, and Notation 2 Remarks on Leibniz Notation
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

The Pope's Rhinoceros and Quantum Mechanics
Bowling Green State University ScholarWorks@BGSU Honors Projects Honors College Spring 4-30-2018 The Pope's Rhinoceros and Quantum Mechanics Michael Gulas [email protected] Follow this and additional works at: https://scholarworks.bgsu.edu/honorsprojects Part of the Mathematics Commons, Ordinary Differential Equations and Applied Dynamics Commons, Other Applied Mathematics Commons, Partial Differential Equations Commons, and the Physics Commons Repository Citation Gulas, Michael, "The Pope's Rhinoceros and Quantum Mechanics" (2018). Honors Projects. 343. https://scholarworks.bgsu.edu/honorsprojects/343 This work is brought to you for free and open access by the Honors College at ScholarWorks@BGSU. It has been accepted for inclusion in Honors Projects by an authorized administrator of ScholarWorks@BGSU. The Pope’s Rhinoceros and Quantum Mechanics Michael Gulas Honors Project Submitted to the Honors College at Bowling Green State University in partial fulfillment of the requirements for graduation with University Honors May 2018 Dr. Steven Seubert Dept. of Mathematics and Statistics, Advisor Dr. Marco Nardone Dept. of Physics and Astronomy, Advisor Contents 1 Abstract 5 2 Classical Mechanics7 2.1 Brachistochrone....................................... 7 2.2 Laplace Transforms..................................... 10 2.2.1 Convolution..................................... 14 2.2.2 Laplace Transform Table.............................. 15 2.2.3 Inverse Laplace Transforms ............................ 15 2.3 Solving Differential Equations Using Laplace -

The Tautochrone/Brachistochrone Problems: How to Make the Period of a Pendulum Independent of Its Amplitude
The Tautochrone/Brachistochrone Problems: How to make the Period of a Pendulum independent of its Amplitude Tatsu Takeuchi∗ Department of Physics, Virginia Tech, Blacksburg VA 24061, USA (Dated: October 12, 2019) Demo presentation at the 2019 Fall Meeting of the Chesapeake Section of the American Associa- tion of Physics Teachers (CSAAPT). I. THE TAUTOCHRONE A. The Period of a Simple Pendulum In introductory physics, we teach our students that a simple pendulum is a harmonic oscillator, and that its angular frequency ! and period T are given by s rg 2π ` ! = ;T = = 2π ; (1) ` ! g where ` is the length of the pendulum. This, of course, is not quite true. The period actually depends on the amplitude of the pendulum's swing. 1. The Small-Angle Approximation Recall that the equation of motion for a simple pendulum is d2θ g = − sin θ : (2) dt2 ` (Note that the equation of motion of a mass sliding frictionlessly along a semi-circular track of radius ` is the same. See FIG. 1.) FIG. 1. The motion of the bob of a simple pendulum (left) is the same as that of a mass sliding frictionlessly along a semi-circular track (right). The tension in the string (left) is simply replaced by the normal force from the track (right). ∗ [email protected] CSAAPT 2019 Fall Meeting Demo { Tatsu Takeuchi, Virginia Tech Department of Physics 2 We need to make the small-angle approximation sin θ ≈ θ ; (3) to render the equation into harmonic oscillator form: d2θ rg ≈ −!2θ ; ! = ; (4) dt2 ` so that it can be solved to yield θ(t) ≈ A sin(!t) ; (5) where we have assumed that pendulum bob is at θ = 0 at time t = 0. -

The Cycloid Scott Morrison
The cycloid Scott Morrison “The time has come”, the old man said, “to talk of many things: Of tangents, cusps and evolutes, of curves and rolling rings, and why the cycloid’s tautochrone, and pendulums on strings.” October 1997 1 Everyone is well aware of the fact that pendulums are used to keep time in old clocks, and most would be aware that this is because even as the pendu- lum loses energy, and winds down, it still keeps time fairly well. It should be clear from the outset that a pendulum is basically an object moving back and forth tracing out a circle; hence, we can ignore the string or shaft, or whatever, that supports the bob, and only consider the circular motion of the bob, driven by gravity. It’s important to notice now that the angle the tangent to the circle makes with the horizontal is the same as the angle the line from the bob to the centre makes with the vertical. The force on the bob at any moment is propor- tional to the sine of the angle at which the bob is currently moving. The net force is also directed perpendicular to the string, that is, in the instantaneous direction of motion. Because this force only changes the angle of the bob, and not the radius of the movement (a pendulum bob is always the same distance from its fixed point), we can write: θθ&& ∝sin Now, if θ is always small, which means the pendulum isn’t moving much, then sinθθ≈. This is very useful, as it lets us claim: θθ&& ∝ which tells us we have simple harmonic motion going on. -

A Tale of the Cycloid in Four Acts
A Tale of the Cycloid In Four Acts Carlo Margio Figure 1: A point on a wheel tracing a cycloid, from a work by Pascal in 16589. Introduction In the words of Mersenne, a cycloid is “the curve traced in space by a point on a carriage wheel as it revolves, moving forward on the street surface.” 1 This deceptively simple curve has a large number of remarkable and unique properties from an integral ratio of its length to the radius of the generating circle, and an integral ratio of its enclosed area to the area of the generating circle, as can be proven using geometry or basic calculus, to the advanced and unique tautochrone and brachistochrone properties, that are best shown using the calculus of variations. Thrown in to this assortment, a cycloid is the only curve that is its own involute. Study of the cycloid can reinforce the curriculum concepts of curve parameterisation, length of a curve, and the area under a parametric curve. Being mechanically generated, the cycloid also lends itself to practical demonstrations that help visualise these abstract concepts. The history of the curve is as enthralling as the mathematics, and involves many of the great European mathematicians of the seventeenth century (See Appendix I “Mathematicians and Timeline”). Introducing the cycloid through the persons involved in its discovery, and the struggles they underwent to get credit for their insights, not only gives sequence and order to the cycloid’s properties and shows which properties required advances in mathematics, but it also gives a human face to the mathematicians involved and makes them seem less remote, despite their, at times, seemingly superhuman discoveries. -
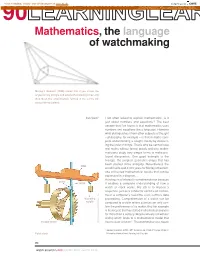
Mathematics, the Language of Watchmaking
View metadata, citation and similar papers at core.ac.uk brought to you by CORE 90LEARNINGprovidedL by Infoscience E- École polytechniqueA fédérale de LausanneRNINGLEARNINGLEARNING Mathematics, the language of watchmaking Morley’s theorem (1898) states that if you trisect the angles of any triangle and extend the trisecting lines until they meet, the small triangle formed in the centre will always be equilateral. Ilan Vardi 1 I am often asked to explain mathematics; is it just about numbers and equations? The best answer that I’ve found is that mathematics uses numbers and equations like a language. However what distinguishes it from other subjects of thought – philosophy, for example – is that in maths com- plete understanding is sought, mostly by discover- ing the order in things. That is why we cannot have real maths without formal proofs and why mathe- maticians study very simple forms to make pro- found discoveries. One good example is the triangle, the simplest geometric shape that has been studied since antiquity. Nevertheless the foliot world had to wait 2,000 years for Morley’s theorem, one of the few mathematical results that can be expressed in a diagram. Horology is of interest to a mathematician because pallet verge it enables a complete understanding of how a watch or clock works. His job is to impose a sequence, just as a conductor controls an orches- tra or a computer’s real-time clock controls data regulating processing. Comprehension of a watch can be weight compared to a violin where science can only con- firm the preferences of its maker. -

LECTURE NOTES (SPRING 2012) 119B: ORDINARY DIFFERENTIAL EQUATIONS June 12, 2012 Contents Part 1. Hamiltonian and Lagrangian Mech
LECTURE NOTES (SPRING 2012) 119B: ORDINARY DIFFERENTIAL EQUATIONS DAN ROMIK DEPARTMENT OF MATHEMATICS, UC DAVIS June 12, 2012 Contents Part 1. Hamiltonian and Lagrangian mechanics 2 Part 2. Discrete-time dynamics, chaos and ergodic theory 44 Part 3. Control theory 66 Bibliographic notes 87 1 2 Part 1. Hamiltonian and Lagrangian mechanics 1.1. Introduction. Newton made the famous discovery that the mo- tion of physical bodies can be described by a second-order differential equation F = ma; where a is the acceleration (the second derivative of the position of the body), m is the mass, and F is the force, which has to be specified in order for the motion to be determined (for example, Newton's law of gravity gives a formula for the force F arising out of the gravitational influence of celestial bodies). The quantities F and a are vectors, but in simple problems where the motion is along only one axis can be taken as scalars. In the 18th and 19th centuries it was realized that Newton's equa- tions can be reformulated in two surprising ways. The new formula- tions, known as Lagrangian and Hamiltonian mechanics, make it eas- ier to analyze the behavior of certain mechanical systems, and also highlight important theoretical aspects of the behavior of such sys- tems which are not immediately apparent from the original Newtonian formulation. They also gave rise to an entirely new and highly use- ful branch of mathematics called the calculus of variations|a kind of \calculus on steroids" (see Section 1.10). Our goal in this chapter is to give an introduction to this deep and beautiful part of the theory of differential equations. -

RETURN of the PLANE EVOLUTE 1. Short Historical Account As We
RETURN OF THE PLANE EVOLUTE RAGNI PIENE, CORDIAN RIENER, AND BORIS SHAPIRO “If I have seen further it is by standing on the shoulders of Giants.” Isaac Newton, from a letter to Robert Hooke Abstract. Below we consider the evolutes of plane real-algebraic curves and discuss some of their complex and real-algebraic properties. In particular, for a given degree d 2, we provide ≥ lower bounds for the following four numerical invariants: 1) the maximal number of times a real line can intersect the evolute of a real-algebraic curve of degree d;2)themaximalnumberofreal cusps which can occur on the evolute of a real-algebraic curve of degree d;3)themaximalnumber of (cru)nodes which can occur on the dual curve to the evolute of a real-algebraic curve of degree d;4)themaximalnumberof(cru)nodeswhichcanoccurontheevoluteofareal-algebraiccurve of degree d. 1. Short historical account As we usually tell our students in calculus classes, the evolute of a curve in the Euclidean plane is the locus of its centers of curvature. The following intriguing information about evolutes can be found on Wikipedia [35]: “Apollonius (c. 200 BC) discussed evolutes in Book V of his treatise Conics. However, Huygens is sometimes credited with being the first to study them, see [17]. Huygens formulated his theory of evolutes sometime around 1659 to help solve the problem of finding the tautochrone curve, which in turn helped him construct an isochronous pendulum. This was because the tautochrone curve is a cycloid, and cycloids have the unique property that their evolute is a cycloid of the same type. -

The Cycloid and the Tautochrone Problem
THE CYCLOID AND THE TAUTOCHRONE PROBLEM Laura Panizzi August 27, 2012 Abstract In this dissertation we will first introduce historically the invention of the Pendulum by Christiaan Huygens, in particular the cycloidal one. Then we will discuss mathematically the cycloid curve, related to the Tautochrone Problem and we’ll compare the circular and cycloidal pendulum. Finally we’ll introduce Abel’s Integral Equation as another way to attack and solve the Tautochrone Problem. 1HistoricalIntroduction Christiaan Huygens (14 April 1629 - 8 July 1695), was a prominent Dutch mathematician, astronomer, physicist and horologist. His work included early telescopic studies elucidating the nature of the rings of Saturn and the discovery of its moon Titan, the invention of the pendulum clock and other investigations in timekeeping, and studies of both optics and the cen- trifugal force. In 1657 patented his invention of the pendulum clock and in 1673 published his mathematical analysis of pendulums, Horologium Oscillatorium sive de motu pendulorum,hisgreatestworkonhorology.Ithadbeenobservedby Marin Mersenne and others that pendulums are not quite isochronous, that is, their period depends on their width of swing, wide swings taking longer than narrow swings. Huygens analysed this problem by finding the shape of the curve down which a mass will slide under the influence of gravity in the same amount of time, regardless of its starting point; the so-called 1 Tautochrone Problem.Bygeometricalmethodswhichwereanearlyuseof calculus, he showed that this curve is a Cycloid. ”On a cycloid whose axis is erected on the perpendicular and whose vertex is located at the bottom, the times of descent, in which a body arrives at the lowest point at the vertex after hav- ing departed from any point on the cycloid, are equal to each other...”1 2TheCycloid The cycloid is the locus of a point on the rim of a circle of radius R rolling without slipping along a straight line. -

Is the Tautochrone Curve Unique? Pedro Terra,A) Reinaldo De Melo E Souza,B) and C
Is the tautochrone curve unique? Pedro Terra,a) Reinaldo de Melo e Souza,b) and C. Farinac) Instituto de Fısica, Universidade Federal do Rio de Janeiro, Rio de Janeiro RJ 21945-970, Brazil (Received 22 February 2016; accepted 9 September 2016) We show that there are an infinite number of tautochrone curves in addition to the cycloid solution first obtained by Christiaan Huygens in 1658. We begin by reviewing the inverse problem of finding the possible potential energy functions that lead to periodic motions of a particle whose period is a given function of its mechanical energy. There are infinitely many such solutions, called “sheared” potentials. As an interesting example, we show that a Poschl-Teller€ potential and the one-dimensional Morse potentials are sheared relative to one another for negative energies, clarifying why they share the same oscillation periods for their bounded solutions. We then consider periodic motions of a particle sliding without friction over a track around its minimum under the influence of a constant gravitational field. After a brief historical survey of the tautochrone problem we show that, given the oscillation period, there is an infinity of tracks that lead to the same period. As a bonus, we show that there are infinitely many tautochrones. VC 2016 American Association of Physics Teachers. [http://dx.doi.org/10.1119/1.4963770] 3 I. INTRODUCTION instance, Pippard presents a nice graphical demonstration of sheared potentials, whereas Osypowski and Olsson4 provide In classical mechanics, we find essentially two kinds of a different demonstration with the aid of Laplace transforms. problems: (i) fundamental (or direct) problems, in which the Recent developments on this topic, and analogous quantum forces on a system are given and we must obtain the possible cases, can be found in Asorey et al.5 motions, and (ii) inverse problems, in which we know the In this article, our main goal is to analyze inverse prob- possible motions and must determine the forces that caused lems for periodic motions of a particle sliding on a friction- them. -

Hands on History a Resource for Teaching Mathematics © 2007 by the Mathematical Association of America (Incorporated)
Hands On History A Resource for Teaching Mathematics © 2007 by The Mathematical Association of America (Incorporated) Library of Congress Catalog Card Number 2007937009 Print edition ISBN 978-0-88385-182-1 Electronic edition ISBN 978-0-88385-976-6 Printed in the United States of America Current Printing (last digit): 10 9 8 7 6 5 4 3 2 1 Hands On History A Resource for Teaching Mathematics Edited by Amy Shell-Gellasch Pacific Lutheran University Published and Distributed by The Mathematical Association of America The MAA Notes Series, started in 1982, addresses a broad range of topics and themes of interest to all who are in- volved with undergraduate mathematics. The volumes in this series are readable, informative, and useful, and help the mathematical community keep up with developments of importance to mathematics. Council on Publications James Daniel, Chair Notes Editorial Board Stephen B Maurer, Editor Paul E. Fishback, Associate Editor Michael C. Axtell Rosalie Dance William E. Fenton Donna L. Flint Michael K. May Judith A. Palagallo Mark Parker Susan F. Pustejovsky Sharon Cutler Ross David J. Sprows Andrius Tamulis MAA Notes 14. Mathematical Writing, by Donald E. Knuth, Tracy Larrabee, and Paul M. Roberts. 16. Using Writing to Teach Mathematics, Andrew Sterrett, Editor. 17. Priming the Calculus Pump: Innovations and Resources, Committee on Calculus Reform and the First Two Years, a subcomit- tee of the Committee on the Undergraduate Program in Mathematics, Thomas W. Tucker, Editor. 18. Models for Undergraduate Research in Mathematics, Lester Senechal, Editor. 19. Visualization in Teaching and Learning Mathematics, Committee on Computers in Mathematics Education, Steve Cunningham and Walter S. -

Flexure Pivot Oscillator with Intrinsically Tuned Isochronism
Flexure Pivot Oscillator With bases. We derive analytical models for the isochronism and gravity sensitivity of the oscillator and validate them by finite Intrinsically Tuned Isochronism element simulation. We give an example of dimensioning this oscil- lator to reach typical practical watch specifications and show that 1 we can tune the isochronism defect with a resolution of 1 s/day E. Thalmann within an operating range of 10% of amplitude. We present a École Polytechnique Fédérale de Lausanne (EPFL), mock-up of the oscillator serving as a preliminary proof-of- Instant-Lab, concept. [DOI: 10.1115/1.4045388] Microcity, Rue de la Maladière 71b, Keywords: compliant mechanisms, design of innovative devices CH-2000 Neuchâtel, Switzerland design of machine elements, mechanical oscillators, isochronism e-mail: etienne.thalmann@epfl.ch Downloaded from https://asmedigitalcollection.asme.org/mechanicaldesign/article-pdf/142/7/075001/6463702/md_142_7_075001.pdf by EPFL Lausanne user on 16 December 2019 M. H. Kahrobaiyan 1 Introduction École Polytechnique Fédérale de Lausanne (EPFL), 1.1 Limitations of Traditional Mechanical Watches. The Instant-Lab, time base used in classical mechanical watches is a harmonic oscil- Microcity, Rue de la Maladière 71b, lator consisting of a spiral spring attached to a balance wheel having a rigid pivot rotating on jeweled bearings. It has essentially the same CH-2000 Neuchâtel, Switzerland architecture as when it was introduced by Huygens in 1675 [1], see e-mail: mohammad.kahrobaiyan@epfl.ch Fig. 1. Subsequently, significant improvements were achieved in chronometric accuracy but seemed to have reached a plateau. The I. Vardi general consensus in horology is that the quality factor of the oscil- École Polytechnique Fédérale de Lausanne (EPFL), lator, a dimensionless number that characterizes the damping of an Instant-Lab, oscillator, needs to be improved for the accuracy to increase [2–4]. -

EUROMATH & EUROSCIENCE 2018 Abstracts Booklet
EUROMATH & EUROSCIENCE 2018 Abstracts Booklet original will be provided with ISBN during the conference registration 1 Contents PLENARY PRESENTATION ........................................................................................................................ 6 CERN – THE EUROPEAN ORGANIZATION FOR NUCLEAR RESEARCH: OPPORTUNITIES OF YOUNG RESEARCHERS AND TALENTED YOUTH – MATHS AND SCIENCE IN ACTION ................ 6 STUDENT PRESENTATIONS IN MATHEMATICS ...................................................................................... 7 MATHEMATICS IN LIFE ........................................................................................................................... 7 MATHEMATICS IN COMPUTING ............................................................................................................ 7 MATHS IN VIDEO GAMES ....................................................................................................................... 8 MATHEMATICS IN FOOTBALL................................................................................................................ 8 SHOPPING MATHEMATICS .................................................................................................................... 8 MATHEMATICS IN JOURNALISM ........................................................................................................... 9 MATHEMATICS IN GAMBLING ............................................................................................................... 9 MATHEMATICS IN CIVIL ENGINEERING