Generating Negative Pedal Curve Through Inverse Function – an Overview *Ramesha
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Plotting Graphs of Parametric Equations
Parametric Curve Plotter This Java Applet plots the graph of various primary curves described by parametric equations, and the graphs of some of the auxiliary curves associ- ated with the primary curves, such as the evolute, involute, parallel, pedal, and reciprocal curves. It has been tested on Netscape 3.0, 4.04, and 4.05, Internet Explorer 4.04, and on the Hot Java browser. It has not yet been run through the official Java compilers from Sun, but this is imminent. It seems to work best on Netscape 4.04. There are problems with Netscape 4.05 and it should be avoided until fixed. The applet was developed on a 200 MHz Pentium MMX system at 1024×768 resolution. (Cost: $4000 in March, 1997. Replacement cost: $695 in June, 1998, if you can find one this slow on sale!) For various reasons, it runs extremely slowly on Macintoshes, and slowly on Sun Sparc stations. The curves should move as quickly as Roadrunner cartoons: for a benchmark, check out the circular trigonometric diagrams on my Java page. This applet was mainly done as an exercise in Java programming leading up to more serious interactive animations in three-dimensional graphics, so no attempt was made to be comprehensive. Those who wish to see much more comprehensive sets of curves should look at: http : ==www − groups:dcs:st − and:ac:uk= ∼ history=Java= http : ==www:best:com= ∼ xah=SpecialP laneCurve dir=specialP laneCurves:html http : ==www:astro:virginia:edu= ∼ eww6n=math=math0:html Disclaimer: Like all computer graphics systems used to illustrate mathematical con- cepts, it cannot be error-free. -

Differential Geometry
Differential Geometry J.B. Cooper 1995 Inhaltsverzeichnis 1 CURVES AND SURFACES—INFORMAL DISCUSSION 2 1.1 Surfaces ................................ 13 2 CURVES IN THE PLANE 16 3 CURVES IN SPACE 29 4 CONSTRUCTION OF CURVES 35 5 SURFACES IN SPACE 41 6 DIFFERENTIABLEMANIFOLDS 59 6.1 Riemannmanifolds .......................... 69 1 1 CURVES AND SURFACES—INFORMAL DISCUSSION We begin with an informal discussion of curves and surfaces, concentrating on methods of describing them. We shall illustrate these with examples of classical curves and surfaces which, we hope, will give more content to the material of the following chapters. In these, we will bring a more rigorous approach. Curves in R2 are usually specified in one of two ways, the direct or parametric representation and the implicit representation. For example, straight lines have a direct representation as tx + (1 t)y : t R { − ∈ } i.e. as the range of the function φ : t tx + (1 t)y → − (here x and y are distinct points on the line) and an implicit representation: (ξ ,ξ ): aξ + bξ + c =0 { 1 2 1 2 } (where a2 + b2 = 0) as the zero set of the function f(ξ ,ξ )= aξ + bξ c. 1 2 1 2 − Similarly, the unit circle has a direct representation (cos t, sin t): t [0, 2π[ { ∈ } as the range of the function t (cos t, sin t) and an implicit representation x : 2 2 → 2 2 { ξ1 + ξ2 =1 as the set of zeros of the function f(x)= ξ1 + ξ2 1. We see from} these examples that the direct representation− displays the curve as the image of a suitable function from R (or a subset thereof, usually an in- terval) into two dimensional space, R2. -

An Approach on Simulation of Involute Tooth Profile Used on Cylindrical Gears
BULETINUL INSTITUTULUI POLITEHNIC DIN IAŞI Publicat de Universitatea Tehnică „Gheorghe Asachi” din Iaşi Volumul 66 (70), Numărul 2, 2020 Secţia CONSTRUCŢII DE MAŞINI AN APPROACH ON SIMULATION OF INVOLUTE TOOTH PROFILE USED ON CYLINDRICAL GEARS BY MIHĂIȚĂ HORODINCĂ “Gheorghe Asachi” Technical University of Iaşi, Faculty of Machine Manufacturing and Industrial Management Received: April 6, 2020 Accepted for publication: June 10, 2020 Abstract. Some results on theoretical approach related by simulation of 2D involute tooth profiles on spur gears, based on rolling of a mobile generating rack around a fixed pitch circle are presented in this paper. A first main approach proves that the geometrical depiction of each generating rack position during rolling can be determined by means of a mathematical model which allows the calculus of Cartesian coordinates for some significant points placed on the rack. The 2D involute tooth profile appears to be the internal envelope bordered by plenty of different equidistant positions of the generating rack during a complete rolling. A second main approach allows the detection of Cartesian coordinates of this internal envelope as the best approximation of 2D involute tooth profile. This paper intends to provide a way for a better understanding of involute tooth profile generation procedure. Keywords: tooth profile; involute; generating rack; simulation. 1. Introduction Gear manufacturing is a major topic in industry due to a large scale utilization of gears for motion transmissions and speed reducers. Commonly the flank gear surface on cylindrical toothed wheels (gears) is described by two Corresponding author: e-mail: [email protected] 22 Mihăiţă Horodincă orthogonally curves: an involute as flank line (in a transverse plane) and a profile line. -
On the Topology of Hypocycloid Curves
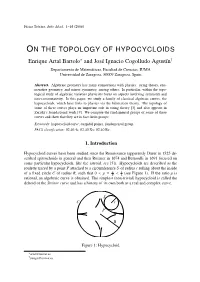
Física Teórica, Julio Abad, 1–16 (2008) ON THE TOPOLOGY OF HYPOCYCLOIDS Enrique Artal Bartolo∗ and José Ignacio Cogolludo Agustíny Departamento de Matemáticas, Facultad de Ciencias, IUMA Universidad de Zaragoza, 50009 Zaragoza, Spain Abstract. Algebraic geometry has many connections with physics: string theory, enu- merative geometry, and mirror symmetry, among others. In particular, within the topo- logical study of algebraic varieties physicists focus on aspects involving symmetry and non-commutativity. In this paper, we study a family of classical algebraic curves, the hypocycloids, which have links to physics via the bifurcation theory. The topology of some of these curves plays an important role in string theory [3] and also appears in Zariski’s foundational work [9]. We compute the fundamental groups of some of these curves and show that they are in fact Artin groups. Keywords: hypocycloid curve, cuspidal points, fundamental group. PACS classification: 02.40.-k; 02.40.Xx; 02.40.Re . 1. Introduction Hypocycloid curves have been studied since the Renaissance (apparently Dürer in 1525 de- scribed epitrochoids in general and then Roemer in 1674 and Bernoulli in 1691 focused on some particular hypocycloids, like the astroid, see [5]). Hypocycloids are described as the roulette traced by a point P attached to a circumference S of radius r rolling about the inside r 1 of a fixed circle C of radius R, such that 0 < ρ = R < 2 (see Figure 1). If the ratio ρ is rational, an algebraic curve is obtained. The simplest (non-trivial) hypocycloid is called the deltoid or the Steiner curve and has a history of its own both as a real and complex curve. -

Around and Around ______
Andrew Glassner’s Notebook http://www.glassner.com Around and around ________________________________ Andrew verybody loves making pictures with a Spirograph. The result is a pretty, swirly design, like the pictures Glassner EThis wonderful toy was introduced in 1966 by Kenner in Figure 1. Products and is now manufactured and sold by Hasbro. I got to thinking about this toy recently, and wondered The basic idea is simplicity itself. The box contains what might happen if we used other shapes for the a collection of plastic gears of different sizes. Every pieces, rather than circles. I wrote a program that pro- gear has several holes drilled into it, each big enough duces Spirograph-like patterns using shapes built out of to accommodate a pen tip. The box also contains some Bezier curves. I’ll describe that later on, but let’s start by rings that have gear teeth on both their inner and looking at traditional Spirograph patterns. outer edges. To make a picture, you select a gear and set it snugly against one of the rings (either inside or Roulettes outside) so that the teeth are engaged. Put a pen into Spirograph produces planar curves that are known as one of the holes, and start going around and around. roulettes. A roulette is defined by Lawrence this way: “If a curve C1 rolls, without slipping, along another fixed curve C2, any fixed point P attached to C1 describes a roulette” (see the “Further Reading” sidebar for this and other references). The word trochoid is a synonym for roulette. From here on, I’ll refer to C1 as the wheel and C2 as 1 Several the frame, even when the shapes Spirograph- aren’t circular. -

Some Curves and the Lengths of Their Arcs Amelia Carolina Sparavigna
Some Curves and the Lengths of their Arcs Amelia Carolina Sparavigna To cite this version: Amelia Carolina Sparavigna. Some Curves and the Lengths of their Arcs. 2021. hal-03236909 HAL Id: hal-03236909 https://hal.archives-ouvertes.fr/hal-03236909 Preprint submitted on 26 May 2021 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. Some Curves and the Lengths of their Arcs Amelia Carolina Sparavigna Department of Applied Science and Technology Politecnico di Torino Here we consider some problems from the Finkel's solution book, concerning the length of curves. The curves are Cissoid of Diocles, Conchoid of Nicomedes, Lemniscate of Bernoulli, Versiera of Agnesi, Limaçon, Quadratrix, Spiral of Archimedes, Reciprocal or Hyperbolic spiral, the Lituus, Logarithmic spiral, Curve of Pursuit, a curve on the cone and the Loxodrome. The Versiera will be discussed in detail and the link of its name to the Versine function. Torino, 2 May 2021, DOI: 10.5281/zenodo.4732881 Here we consider some of the problems propose in the Finkel's solution book, having the full title: A mathematical solution book containing systematic solutions of many of the most difficult problems, Taken from the Leading Authors on Arithmetic and Algebra, Many Problems and Solutions from Geometry, Trigonometry and Calculus, Many Problems and Solutions from the Leading Mathematical Journals of the United States, and Many Original Problems and Solutions. -

Generalization of the Pedal Concept in Bidimensional Spaces. Application to the Limaçon of Pascal• Generalización Del Concep
Generalization of the pedal concept in bidimensional spaces. Application to the limaçon of Pascal• Irene Sánchez-Ramos a, Fernando Meseguer-Garrido a, José Juan Aliaga-Maraver a & Javier Francisco Raposo-Grau b a Escuela Técnica Superior de Ingeniería Aeronáutica y del Espacio, Universidad Politécnica de Madrid, Madrid, España. [email protected], [email protected], [email protected] b Escuela Técnica Superior de Arquitectura, Universidad Politécnica de Madrid, Madrid, España. [email protected] Received: June 22nd, 2020. Received in revised form: February 4th, 2021. Accepted: February 19th, 2021. Abstract The concept of a pedal curve is used in geometry as a generation method for a multitude of curves. The definition of a pedal curve is linked to the concept of minimal distance. However, an interesting distinction can be made for . In this space, the pedal curve of another curve C is defined as the locus of the foot of the perpendicular from the pedal point P to the tangent2 to the curve. This allows the generalization of the definition of the pedal curve for any given angle that is not 90º. ℝ In this paper, we use the generalization of the pedal curve to describe a different method to generate a limaçon of Pascal, which can be seen as a singular case of the locus generation method and is not well described in the literature. Some additional properties that can be deduced from these definitions are also described. Keywords: geometry; pedal curve; distance; angularity; limaçon of Pascal. Generalización del concepto de curva podal en espacios bidimensionales. Aplicación a la Limaçon de Pascal Resumen El concepto de curva podal está extendido en la geometría como un método generativo para multitud de curvas. -

On the Topology of Hypocycloids
ON THE TOPOLOGY OF HYPOCYCLOIDS ENRIQUE ARTAL BARTOLO AND JOSE´ IGNACIO COGOLLUDO-AGUST´IN Abstract. Algebraic geometry has many connections with physics: string theory, enumerative geometry, and mirror symmetry, among others. In par- ticular, within the topological study of algebraic varieties physicists focus on aspects involving symmetry and non-commutativity. In this paper, we study a family of classical algebraic curves, the hypocycloids, which have links to physics via the bifurcation theory. The topology of some of these curves plays an important role in string theory [3] and also appears in Zariski’s foundational work [9]. We compute the fundamental groups of some of these curves and show that they are in fact Artin groups. 1. Introduction Hypocycloid curves have been studied since the Renaissance (apparently D¨urer in 1525 described epitrochoids in general and then Roemer in 1674 and Bernoulli in 1691 focused on some particular hypocycloids, like the astroid, see [5]). Hypocy- cloids are described as the roulette traced by a point P attached to a circumference S of radius r rolling about the inside of a fixed circle C of radius R, such that r 1 0 < ρ = R < 2 (see Figure 1). If the ratio ρ is rational, an algebraic curve is ob- tained. The simplest (non-trivial) hypocycloid is called the deltoid or the Steiner curve and has a history of its own both as a real and complex curve. S r C P arXiv:1703.08308v1 [math.AG] 24 Mar 2017 R Figure 1. Hypocycloid Key words and phrases. hypocycloid curve, cuspidal points, fundamental group. -

Strophoids, a Family of Cubic Curves with Remarkable Properties
Hellmuth STACHEL STROPHOIDS, A FAMILY OF CUBIC CURVES WITH REMARKABLE PROPERTIES Abstract: Strophoids are circular cubic curves which have a node with orthogonal tangents. These rational curves are characterized by a series or properties, and they show up as locus of points at various geometric problems in the Euclidean plane: Strophoids are pedal curves of parabolas if the corresponding pole lies on the parabola’s directrix, and they are inverse to equilateral hyperbolas. Strophoids are focal curves of particular pencils of conics. Moreover, the locus of points where tangents through a given point contact the conics of a confocal family is a strophoid. In descriptive geometry, strophoids appear as perspective views of particular curves of intersection, e.g., of Viviani’s curve. Bricard’s flexible octahedra of type 3 admit two flat poses; and here, after fixing two opposite vertices, strophoids are the locus for the four remaining vertices. In plane kinematics they are the circle-point curves, i.e., the locus of points whose trajectories have instantaneously a stationary curvature. Moreover, they are projections of the spherical and hyperbolic analogues. For any given triangle ABC, the equicevian cubics are strophoids, i.e., the locus of points for which two of the three cevians have the same lengths. On each strophoid there is a symmetric relation of points, so-called ‘associated’ points, with a series of properties: The lines connecting associated points P and P’ are tangent of the negative pedal curve. Tangents at associated points intersect at a point which again lies on the cubic. For all pairs (P, P’) of associated points, the midpoints lie on a line through the node N. -

A Special Conic Associated with the Reuleaux Negative Pedal Curve
INTERNATIONAL JOURNAL OF GEOMETRY Vol. 10 (2021), No. 2, 33–49 A SPECIAL CONIC ASSOCIATED WITH THE REULEAUX NEGATIVE PEDAL CURVE LILIANA GABRIELA GHEORGHE and DAN REZNIK Abstract. The Negative Pedal Curve of the Reuleaux Triangle w.r. to a pedal point M located on its boundary consists of two elliptic arcs and a point P0. Intriguingly, the conic passing through the four arc endpoints and by P0 has one focus at M. We provide a synthetic proof for this fact using Poncelet’s porism, polar duality and inversive techniques. Additional interesting properties of the Reuleaux negative pedal w.r. to pedal point M are also included. 1. Introduction Figure 1. The sides of the Reuleaux Triangle R are three circular arcs of circles centered at each Reuleaux vertex Vi; i = 1; 2; 3. of an equilateral triangle. The Reuleaux triangle R is the convex curve formed by the arcs of three circles of equal radii r centered on the vertices V1;V2;V3 of an equilateral triangle and that mutually intercepts in these vertices; see Figure1. This triangle is mostly known due to its constant width property [4]. Keywords and phrases: conic, inversion, pole, polar, dual curve, negative pedal curve. (2020)Mathematics Subject Classification: 51M04,51M15, 51A05. Received: 19.08.2020. In revised form: 26.01.2021. Accepted: 08.10.2020 34 Liliana Gabriela Gheorghe and Dan Reznik Figure 2. The negative pedal curve N of the Reuleaux Triangle R w.r. to a point M on its boundary consist on an point P0 (the antipedal of M through V3) and two elliptic arcs A1A2 and B1B2 (green and blue). -

Curves with Rational Chord-Length Parametrization
Curves with rational chord-length parametrization J. Sanchez-Reyes , L. Fernandez-Jambrina Instituto de Matemdtica Aplicada a la Ciencia e Ingenieria, ETS Ingenieros Industrials, Universidad de Castilla-La Mancha, Campus Universitario, 13071-Ciudad Real, Spain ETSI Navales, Universidad Politecnica de Madrid, Arco de la Victoria s/n, 28040-Madrid, Spain Abstract It has been recently proved that rational quadratic circles in standard Bezier form are parameterized by chord-length. If we consider that standard circles coincide with the isoparametric curves in a system of bipolar coordinates, this property comes as a straightforward consequence. General curves with chord-length parametrization are simply the analogue in bipolar coordinates of nonparametric curves. This interpretation furnishes a compact explicit expression for all planar curves with rational chord-length parametrization. In addition to straight lines and circles in standard form, they include remarkable curves, such as the equilateral hyperbola, Lemniscate of Bernoulli and Limacon of Pascal. The extension to 3D rational curves is also tackled. Keywords: Bezier circle; Bipolar coordinates; Chord-length parametrization; Equilateral hyperbola; Lemniscate of Bernoulli 1. Chord-length parametrization Given a parametric curve p(t) over a certain domain t e[a,b], its chord-length at a given point p(7) is defined as (Farm, 2001, 2006): IF|p(0 — A| chord(0 := y A = p(fl), B = p(Z?) (1) |p(0-A| + |p(0-B| where bars denote the modulus of a vector. The curve is said to be chord-length parameterized if chord(f) = t. Chord- length parametrization is clearly invariant with respect to linear transformations of the domain. -

Deltoid* the Deltoid Curve Was Conceived by Euler in 1745 in Con
Deltoid* The Deltoid curve was conceived by Euler in 1745 in con- nection with his study of caustics. Formulas in 3D-XplorMath: x = 2 cos(t) + cos(2t); y = 2 sin(t) − sin(2t); 0 < t ≤ 2π; and its implicit equation is: (x2 + y2)2 − 8x(x2 − 3y2) + 18(x2 + y2) − 27 = 0: The Deltoid or Tricuspid The Deltoid is also known as the Tricuspid, and can be defined as the trace of a point on one circle that rolls inside * This file is from the 3D-XplorMath project. Please see: http://3D-XplorMath.org/ 1 2 another circle of 3 or 3=2 times as large a radius. The latter is called double generation. The figure below shows both of these methods. O is the center of the fixed circle of radius a, C the center of the rolling circle of radius a=3, and P the tracing point. OHCJ, JPT and TAOGE are colinear, where G and A are distant a=3 from O, and A is the center of the rolling circle with radius 2a=3. PHG is colinear and gives the tangent at P. Triangles TEJ, TGP, and JHP are all similar and T P=JP = 2 . Angle JCP = 3∗Angle BOJ. Let the point Q (not shown) be the intersection of JE and the circle centered on C. Points Q, P are symmetric with respect to point C. The intersection of OQ, PJ forms the center of osculating circle at P. 3 The Deltoid has numerous interesting properties. Properties Tangent Let A be the center of the curve, B be one of the cusp points,and P be any point on the curve.