The Whole Brain Architecture Approach: Accelerating the Development of Artificial General Intelligence by Referring to the Brain
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Reconstruction and Simulation of the Cerebellar Microcircuit: a Scaffold Strategy to Embed Different Levels of Neuronal Details
Reconstruction and simulation of the cerebellar microcircuit: a scaffold strategy to embed different levels of neuronal details Claudia Casellato, Elisa Marenzi, Stefano Casali, Chaitanya Medini, Alice Geminiani, Alessandra Pedrocchi, Egidio D’Angelo Department of Brain and Behavioral Sciences, University of Pavia, Italy Department of Electronics, Information and Bioengineering, Politecnico di Milano, Milan, Italy Computational models allow propagating microscopic phenomena into large‐scale networks and inferencing causal relationships across scales. Here we reconstruct the cerebellar circuit by bottom‐up modeling, reproducing the peculiar properties of this structure, which shows a quasi‐crystalline geometrical organization well defined by convergence/divergence ratios of neuronal connections and by the anisotropic 3D orientation of dendritic and axonal processes [1]. Therefore, a cerebellum scaffold model has been developed and tested. It maintains scalability and can be flexibly handled to incorporate neuronal properties on multiple scales of complexity. The cerebellar scaffold includes the canonical neuron types: Granular cell, Golgi cell, Purkinje cell, Stellate and Basket cells, Deep Cerebellar Nuclei cell. Placement was based on density and encumbrance values, connectivity on specific geometry of dendritic and axonal fields, and on distance‐based probability. In the first release, spiking point‐neuron models based on Integrate&Fire dynamics with exponential synapses were used. The network was run in the neural simulator pyNEST. Complex spatiotemporal patterns of activity, similar to those observed in vivo, emerged [2]. For a second release of the microcircuit model, an extension of the generalized Leaky Integrate&Fire model has been developed (E‐GLIF), optimized for each cerebellar neuron type and inserted into the built scaffold [3]. -

Artificial Consciousness and the Consciousness-Attention Dissociation
Consciousness and Cognition 45 (2016) 210–225 Contents lists available at ScienceDirect Consciousness and Cognition journal homepage: www.elsevier.com/locate/concog Review article Artificial consciousness and the consciousness-attention dissociation ⇑ Harry Haroutioun Haladjian a, , Carlos Montemayor b a Laboratoire Psychologie de la Perception, CNRS (UMR 8242), Université Paris Descartes, Centre Biomédical des Saints-Pères, 45 rue des Saints-Pères, 75006 Paris, France b San Francisco State University, Philosophy Department, 1600 Holloway Avenue, San Francisco, CA 94132 USA article info abstract Article history: Artificial Intelligence is at a turning point, with a substantial increase in projects aiming to Received 6 July 2016 implement sophisticated forms of human intelligence in machines. This research attempts Accepted 12 August 2016 to model specific forms of intelligence through brute-force search heuristics and also reproduce features of human perception and cognition, including emotions. Such goals have implications for artificial consciousness, with some arguing that it will be achievable Keywords: once we overcome short-term engineering challenges. We believe, however, that phenom- Artificial intelligence enal consciousness cannot be implemented in machines. This becomes clear when consid- Artificial consciousness ering emotions and examining the dissociation between consciousness and attention in Consciousness Visual attention humans. While we may be able to program ethical behavior based on rules and machine Phenomenology learning, we will never be able to reproduce emotions or empathy by programming such Emotions control systems—these will be merely simulations. Arguments in favor of this claim include Empathy considerations about evolution, the neuropsychological aspects of emotions, and the disso- ciation between attention and consciousness found in humans. -

The Human Brain Project—Synergy Between Neuroscience, Computing, Informatics, and Brain-Inspired Technologies
COMMUNITY PAGE The Human Brain ProjectÐSynergy between neuroscience, computing, informatics, and brain-inspired technologies 1,2 3 4 5 Katrin AmuntsID *, Alois C. Knoll , Thomas LippertID , Cyriel M. A. PennartzID , 6 7 8 9 10 Philippe RyvlinID , Alain DestexheID , Viktor K. Jirsa , Egidio D'Angelo , Jan G. BjaalieID 1 Institute for Neuroscience and Medicine (INM-1), Forschungszentrum JuÈlich, Germany, 2 C. and O. Vogt Institute for Brain Research, University Hospital DuÈsseldorf, Heinrich Heine University DuÈsseldorf, DuÈsseldorf, Germany, 3 Institut fuÈr Informatik VI, Technische UniversitaÈt MuÈnchen, Garching bei MuÈnchen, a1111111111 Germany, 4 JuÈlich Supercomputing Centre, Institute for Advanced Simulation, Forschungszentrum JuÈlich, a1111111111 Germany, 5 Swammerdam Institute for Life Sciences, Faculty of Science, University of Amsterdam, the a1111111111 Netherlands, 6 Department of Clinical Neurosciences, Centre Hospitalo-Universitaire Vaudois (CHUV) and a1111111111 University of Lausanne, Lausanne, Switzerland, 7 Unite de Neurosciences, Information & Complexite a1111111111 (UNIC), Centre National de la Recherche Scientifique (CNRS), Gif-sur-Yvette, France, 8 Institut de Neurosciences des Systèmes, Inserm UMR1106, Aix-Marseille UniversiteÂ, Faculte de MeÂdecine, Marseille, France, 9 Department of Brain and Behavioral Science, Unit of Neurophysiology, University of Pavia, Pavia, Italy, 10 Institute of Basic Medical Sciences, University of Oslo, Oslo, Norway * [email protected] OPEN ACCESS Citation: Amunts K, Knoll AC, Lippert T, Pennartz CMA, Ryvlin P, Destexhe A, et al. (2019) The Abstract Human Brain ProjectÐSynergy between neuroscience, computing, informatics, and brain- The Human Brain Project (HBP) is a European flagship project with a 10-year horizon aim- inspired technologies. PLoS Biol 17(7): e3000344. ing to understand the human brain and to translate neuroscience knowledge into medicine https://doi.org/10.1371/journal.pbio.3000344 and technology. -
Artificial Brain Project of Visual Motion
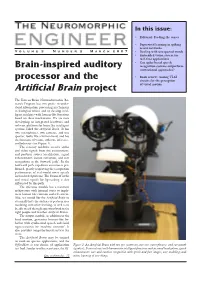
In this issue: • Editorial: Feeding the senses • Supervised learning in spiking neural networks V o l u m e 3 N u m b e r 2 M a r c h 2 0 0 7 • Dealing with unexpected words • Embedded vision system for real-time applications • Can spike-based speech Brain-inspired auditory recognition systems outperform conventional approaches? processor and the • Book review: Analog VLSI circuits for the perception Artificial Brain project of visual motion The Korean Brain Neuroinformatics Re- search Program has two goals: to under- stand information processing mechanisms in biological brains and to develop intel- ligent machines with human-like functions based on these mechanisms. We are now developing an integrated hardware and software platform for brain-like intelligent systems called the Artificial Brain. It has two microphones, two cameras, and one speaker, looks like a human head, and has the functions of vision, audition, inference, and behavior (see Figure 1). The sensory modules receive audio and video signals from the environment, and perform source localization, signal enhancement, feature extraction, and user recognition in the forward ‘path’. In the backward path, top-down attention is per- formed, greatly improving the recognition performance of real-world noisy speech and occluded patterns. The fusion of audio and visual signals for lip-reading is also influenced by this path. The inference module has a recurrent architecture with internal states to imple- ment human-like emotion and self-esteem. Also, we would like the Artificial Brain to eventually have the abilities to perform user modeling and active learning, as well as to be able to ask the right questions both to the right people and to other Artificial Brains. -

ABS: Scanning Neural Networks for Back-Doors by Artificial Brain
ABS: Scanning Neural Networks for Back-doors by Artificial Brain Stimulation Yingqi Liu Wen-Chuan Lee Guanhong Tao [email protected] [email protected] [email protected] Purdue University Purdue University Purdue University Shiqing Ma Yousra Aafer Xiangyu Zhang [email protected] [email protected] [email protected] Rutgers University Purdue University Purdue University ABSTRACT Kingdom. ACM, New York, NY, USA, 18 pages. https://doi.org/10.1145/ This paper presents a technique to scan neural network based AI 3319535.3363216 models to determine if they are trojaned. Pre-trained AI models may contain back-doors that are injected through training or by 1 INTRODUCTION transforming inner neuron weights. These trojaned models operate Neural networks based artificial intelligence models are widely normally when regular inputs are provided, and mis-classify to a used in many applications, such as face recognition [47], object specific output label when the input is stamped with some special detection [49] and autonomous driving [14], demonstrating their pattern called trojan trigger. We develop a novel technique that advantages over traditional computing methodologies. More and analyzes inner neuron behaviors by determining how output acti- more people tend to believe that the applications of AI models vations change when we introduce different levels of stimulation to in all aspects of life is around the corner [7, 8]. With increasing a neuron. The neurons that substantially elevate the activation of a complexity and functionalities, training such models entails enor- particular output label regardless of the provided input is considered mous efforts in collecting training data and optimizing performance. -
NEST Desktop
NEST Conference 2019 A Forum for Users & Developers Conference Program Norwegian University of Life Sciences 24-25 June 2019 NEST Conference 2019 24–25 June 2019, Ås, Norway Monday, 24th June 11:00 Registration and lunch 12:30 Opening (Dean Anne Cathrine Gjærde, Hans Ekkehard Plesser) 12:50 GeNN: GPU-enhanced neural networks (James Knight) 13:25 Communication sparsity in distributed Spiking Neural Network Simulations to improve scalability (Carlos Fernandez-Musoles) 14:00 Coffee & Posters 15:00 Sleep-like slow oscillations induce hierarchical memory association and synaptic homeostasis in thalamo-cortical simulations (Pier Stanislao Paolucci) 15:20 Implementation of a Frequency-Based Hebbian STDP in NEST (Alberto Antonietti) 15:40 Spike Timing Model of Visual Motion Perception and Decision Making with Reinforcement Learning in NEST (Petia Koprinkova-Hristova) 16:00 What’s new in the NEST user-level documentation (Jessica Mitchell) 16:20 ICEI/Fenix: HPC and Cloud infrastructure for computational neuroscientists (Jochen Eppler) 17:00 NEST Initiative Annual Meeting (members-only) 19:00 Conference Dinner Tuesday, 25th June 09:00 Construction and characterization of a detailed model of mouse primary visual cortex (Stefan Mihalas) 09:45 Large-scale simulation of a spiking neural network model consisting of cortex, thalamus, cerebellum and basal ganglia on K computer (Jun Igarashi) 10:10 Simulations of a multiscale olivocerebellar spiking neural network in NEST: a case study (Alice Geminiani) 10:30 NEST3 Quick Preview (Stine Vennemo & Håkon Mørk) -
The Project Loon
AISSMS INSTITUTE OF INFORMATION TECHNOLOGY Affiliated to Savitribai Phule Pune University , Approved by AICTE, New Delhi and Recognised by Govt. Of Maharashtra (ID No. PU/PN/ENGG/124/1998) Accredited by NAAC with ‘A’ Grade TELESCAN 2K19 TELESCAN 2019 Editorial Committee We, the students of Electronics & Telecommunication feel the privilege to present the Technical Departmental Magazine of Academic year- TELESCAN 2019 in front of you the magazine provides a platform for the students to express their technical knowledge and enhance their own technical knowledge. We would like to thank Dr.M.P.Sardey (HOD) and Prof. Santosh H Lavate for their constant support and encouraging us throughout the semester to make the magazine great hit. Editorial Team: Staff Co-ordinator: Sanmay Kamble (BE) Santosh H Lavate Abhishek Parte (BE) Supriya Lohar Nehal Gholse (TE) Ankush Muley (TE) TELESCAN 2019 VISION OF E&TC DEPARTMENT To provide quality education in Electronics & Telecommunication Engineering with professional ethics MISSION OF E&TC DEPATMENT To develop technical competency, ethics for professional growth and sense of social responsibility among students TELESCAN 2019 INDEX Sr No. Topic Page No. 1 3 Dimensional Integrated Circuit 1 2 4D Printer 4 3 5 Nanometer Semiconductor 5 4 AI: Changing The Face Of Defence 7 5 Artificial Intelligence 10 6 AI: A Boon Or A Bane 11 7 Block Chain 12 8 Blue Brain 14 9 Cobra Effect 16 10 A New Era In Industrial Production 18 11 Radiometry 20 12 Growing Need For Large Bank Of Test Item 21 13 The Project Loon 23 14 -
An New Type of Artificial Brain Using Controlled Neurons
New Developments in Neural Networks, J. R. Burger An New Type Of Artificial Brain Using Controlled Neurons John Robert Burger, Emeritus Professor, ECE Department, California State University Northridge, [email protected] Abstract -- Plans for a new type of artificial brain are possible because of realistic neurons in logically structured arrays of controlled toggles, one toggle per neuron. Controlled toggles can be made to compute, in parallel, parameters of critical importance for each of several complex images recalled from associative long term memory. Controlled toggles are shown below to amount to a new type of neural network that supports autonomous behavior and action. I. INTRODUCTION A brain-inspired system is proposed below in order to demonstrate the utility of electrically realistic neurons as controlled toggles. Plans for artificial brains are certainly not new [1, 2]. As in other such systems, the system below will monitor external information, analogous to that flowing from eyes, ears and other sensors. If the information is significant, for instance, bright spots, or loud passages, or if identical information is presented several times, it will automatically be committed to associative long term memory; it will automatically be memorized. External information is concurrently impressed on a short term memory, which is a logical row of short term memory neurons. From here cues are derived and held long enough to accomplish a search of associative long term memory. Unless the cues are very exacting indeed, several returned images are expected. Each return then undergoes calculations for priority; an image with maximum priority is imposed on (and overwrites the current contents of) short term memory. -

Is Google Making Us Stupid?
Is Google Making Us Stupid? What the Internet is doing to our brains Nicholas Carr Jul 1 2008, 12:00 PM ET "Dave, stop. Stop, will you? Stop, Dave. Will you stop, Dave?” So the supercomputer HAL pleads with the implacable astronaut Dave Bowman in a famous and weirdly poignant scene toward the end of Stanley Kubrick’s 2001: A Space Odyssey. Bowman, having nearly been sent to a deep-space death by the malfunctioning machine, is calmly, coldly disconnecting the memory circuits that control its artificial “ brain. “Dave, my mind is going,” HAL says, forlornly. “I can feel it. I can feel it.” I can feel it, too. Over the past few years I’ve had an uncomfortable sense that someone, or something, has been tinkering with my brain, remapping the neural circuitry, reprogramming the memory. My mind isn’t going—so far as I can tell—but it’s changing. I’m not thinking the way I used to think. I can feel it most strongly when I’m reading. Immersing myself in a book or a lengthy article used to be easy. My mind would get caught up in the narrative or the turns of the argument, and I’d spend hours strolling through long stretches of prose. That’s rarely the case anymore. Now my concentration often starts to drift after two or three pages. I get fidgety, lose the thread, and begin looking for something else to do. I feel as if I’m always dragging my wayward brain back to the text. The deep reading that used to come naturally has become a struggle. -

An Overview of Mind Uploading
IOSR Journal of Engineering (IOSR JEN) www.iosrjen.org ISSN (e): 2250-3021, ISSN (p): 2278-8719 PP 18-25 An Overview of Mind Uploading Mrs. Mausami Sawarkar1, Mr. Dhiraj Rane2 Dept of CSE, Priydarshani J L CoE, Nagpur Dept. of CS, GHRIIT, Nagpur Abstract: Mind uploading is an ongoing area of active research, bringing together ideas from neuroscience, computer science, engineering, and philosophy. Realistically, mind uploading likely lies many decades in the future, but the short-term offers the possibility of advanced neural prostheses that may benefit us. Mind uploading is the conceptual futuristic technology of transferring human minds tocomputer hardware using whole-brain emulation process. In this research work, we have discuss the brief review of the technological prospectsfor mind uploading, a range of philosophical and ethical aspects of the technology. We have also summarizes various issues for mind uploading. There are many technologies are working on these issues will be summarize. These include questions about whether uploads will have consciousness and whether uploading willpreserve personal identity, as well as what impact on society a working uploading technology is likelyto have and whether these impacts are desirable. The issue of whether we ought to move forwardstowards uploading technology remains as unclear as ever. Keywords: Mind Uploading, Whole brain simulation, I. Introduction Mind uploading is an ongoing area of active research, bringing together ideas from neuroscience, computer science, engineering, and philosophy. Realistically, mind uploading likely lies many decades in the future, but the short-term offers the possibility of advanced neural prostheses that may benefit us. Mind uploading is a popular term for a process by which the mind, a collection of memories, personality, and attributes of a specific individual, is transferred from its original biological brain to an artificial computational substrate. -

Brain Modelling As a Service: the Virtual Brain on EBRAINS
Brain Modelling as a Service: The Virtual Brain on EBRAINS Michael Schirnera,b,c,d,e, Lia Domidef, Dionysios Perdikisa,b, Paul Triebkorna,b,g, Leon Stefanovskia,b, Roopa Paia,b, Paula Prodanf, Bogdan Valeanf, Jessica Palmera,b, Chloê Langforda,b, André Blickensdörfera,b, Michiel van der Vlagh, Sandra Diaz-Pierh, Alexander Peyserh, Wouter Klijnh, Dirk Pleiteri,j, Anne Nahmi, Oliver Schmidk, Marmaduke Woodmang, Lyuba Zehll, Jan Fousekg, Spase Petkoskig, Lionel Kuschg, Meysam Hashemig, Daniele Marinazzom,n, Jean-François Mangino, Agnes Flöelp,q, Simisola Akintoyer, Bernd Carsten Stahls, Michael Cepict, Emily Johnsont, Gustavo Decou,v,w,x, Anthony R. McIntoshy, Claus C. Hilgetagz, a, Marc Morgank, Bernd Schulleri, Alex Uptonb, Colin McMurtrieb, Timo Dickscheidl, Jan G. Bjaaliec, Katrin Amuntsl,d, Jochen Mersmanne, Viktor Jirsag, Petra Rittera,b,c,d,e,* aBerlin Institute of Health at Charité – Universitätsmedizin Berlin, Charitéplatz 1, 10117 Berlin, Germany bCharité – Universitätsmedizin Berlin, corporate memBer of Freie Universität Berlin and HumBoldt Universität zu Berlin, Department of Neurology with Experimental Neurology, Charitéplatz 1, 10117 Berlin, Germany cBernstein Focus State Dependencies of Learning & Bernstein Center for Computational Neuroscience, Berlin, Germany dEinstein Center for Neuroscience Berlin, Charitéplatz 1, 10117 Berlin, Germany eEinstein Center Digital Future, Wilhelmstraße 67, 10117 Berlin, Germany fCodemart, Str. Petofi Sandor, Cluj Napoca, Romania gInstitut de Neurosciences des Systèmes, Aix Marseille Université, -

A World Survey of Artificial Brain Projects, Part II Biologically Inspired
Neurocomputing 74 (2010) 30–49 Contents lists available at ScienceDirect Neurocomputing journal homepage: www.elsevier.com/locate/neucom A world survey of artificial brain projects, Part II: Biologically inspired cognitive architectures Ben Goertzel a,b,n, Ruiting Lian b, Itamar Arel c, Hugo de Garis b, Shuo Chen b a Novamente LLC, 1405 Bernerd Place, Rockville, MD 20851, USA b Fujian Key Lab of the Brain-like Intelligent Systems, Xiamen University, Xiamen, China c Machine Intelligence Lab, Department of Electrical Engineering and Computer Science, University of Tennessee, Knoxville, USA article info abstract Available online 18 September 2010 A number of leading cognitive architectures that are inspired by the human brain, at various levels of Keywords: granularity, are reviewed and compared, with special attention paid to the way their internal structures Artificial brains and dynamics map onto neural processes. Four categories of Biologically Inspired Cognitive Cognitive architectures Architectures (BICAs) are considered, with multiple examples of each category briefly reviewed, and selected examples discussed in more depth: primarily symbolic architectures (e.g. ACT-R), emergentist architectures (e.g. DeSTIN), developmental robotics architectures (e.g. IM-CLEVER), and our central focus, hybrid architectures (e.g. LIDA, CLARION, 4D/RCS, DUAL, MicroPsi, and OpenCog). Given the state of the art in BICA, it is not yet possible to tell whether emulating the brain on the architectural level is going to be enough to allow rough emulation of brain function; and given the state of the art in neuroscience, it is not yet possible to connect BICAs with large-scale brain simulations in a thoroughgoing way.