Sigg, Stephan a Global Brain Fuelled by Local Intelligence
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Artificial Consciousness and the Consciousness-Attention Dissociation
Consciousness and Cognition 45 (2016) 210–225 Contents lists available at ScienceDirect Consciousness and Cognition journal homepage: www.elsevier.com/locate/concog Review article Artificial consciousness and the consciousness-attention dissociation ⇑ Harry Haroutioun Haladjian a, , Carlos Montemayor b a Laboratoire Psychologie de la Perception, CNRS (UMR 8242), Université Paris Descartes, Centre Biomédical des Saints-Pères, 45 rue des Saints-Pères, 75006 Paris, France b San Francisco State University, Philosophy Department, 1600 Holloway Avenue, San Francisco, CA 94132 USA article info abstract Article history: Artificial Intelligence is at a turning point, with a substantial increase in projects aiming to Received 6 July 2016 implement sophisticated forms of human intelligence in machines. This research attempts Accepted 12 August 2016 to model specific forms of intelligence through brute-force search heuristics and also reproduce features of human perception and cognition, including emotions. Such goals have implications for artificial consciousness, with some arguing that it will be achievable Keywords: once we overcome short-term engineering challenges. We believe, however, that phenom- Artificial intelligence enal consciousness cannot be implemented in machines. This becomes clear when consid- Artificial consciousness ering emotions and examining the dissociation between consciousness and attention in Consciousness Visual attention humans. While we may be able to program ethical behavior based on rules and machine Phenomenology learning, we will never be able to reproduce emotions or empathy by programming such Emotions control systems—these will be merely simulations. Arguments in favor of this claim include Empathy considerations about evolution, the neuropsychological aspects of emotions, and the disso- ciation between attention and consciousness found in humans. -
Artificial Brain Project of Visual Motion
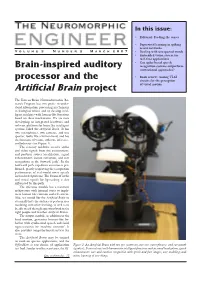
In this issue: • Editorial: Feeding the senses • Supervised learning in spiking neural networks V o l u m e 3 N u m b e r 2 M a r c h 2 0 0 7 • Dealing with unexpected words • Embedded vision system for real-time applications • Can spike-based speech Brain-inspired auditory recognition systems outperform conventional approaches? processor and the • Book review: Analog VLSI circuits for the perception Artificial Brain project of visual motion The Korean Brain Neuroinformatics Re- search Program has two goals: to under- stand information processing mechanisms in biological brains and to develop intel- ligent machines with human-like functions based on these mechanisms. We are now developing an integrated hardware and software platform for brain-like intelligent systems called the Artificial Brain. It has two microphones, two cameras, and one speaker, looks like a human head, and has the functions of vision, audition, inference, and behavior (see Figure 1). The sensory modules receive audio and video signals from the environment, and perform source localization, signal enhancement, feature extraction, and user recognition in the forward ‘path’. In the backward path, top-down attention is per- formed, greatly improving the recognition performance of real-world noisy speech and occluded patterns. The fusion of audio and visual signals for lip-reading is also influenced by this path. The inference module has a recurrent architecture with internal states to imple- ment human-like emotion and self-esteem. Also, we would like the Artificial Brain to eventually have the abilities to perform user modeling and active learning, as well as to be able to ask the right questions both to the right people and to other Artificial Brains. -

ABS: Scanning Neural Networks for Back-Doors by Artificial Brain
ABS: Scanning Neural Networks for Back-doors by Artificial Brain Stimulation Yingqi Liu Wen-Chuan Lee Guanhong Tao [email protected] [email protected] [email protected] Purdue University Purdue University Purdue University Shiqing Ma Yousra Aafer Xiangyu Zhang [email protected] [email protected] [email protected] Rutgers University Purdue University Purdue University ABSTRACT Kingdom. ACM, New York, NY, USA, 18 pages. https://doi.org/10.1145/ This paper presents a technique to scan neural network based AI 3319535.3363216 models to determine if they are trojaned. Pre-trained AI models may contain back-doors that are injected through training or by 1 INTRODUCTION transforming inner neuron weights. These trojaned models operate Neural networks based artificial intelligence models are widely normally when regular inputs are provided, and mis-classify to a used in many applications, such as face recognition [47], object specific output label when the input is stamped with some special detection [49] and autonomous driving [14], demonstrating their pattern called trojan trigger. We develop a novel technique that advantages over traditional computing methodologies. More and analyzes inner neuron behaviors by determining how output acti- more people tend to believe that the applications of AI models vations change when we introduce different levels of stimulation to in all aspects of life is around the corner [7, 8]. With increasing a neuron. The neurons that substantially elevate the activation of a complexity and functionalities, training such models entails enor- particular output label regardless of the provided input is considered mous efforts in collecting training data and optimizing performance. -
The Project Loon
AISSMS INSTITUTE OF INFORMATION TECHNOLOGY Affiliated to Savitribai Phule Pune University , Approved by AICTE, New Delhi and Recognised by Govt. Of Maharashtra (ID No. PU/PN/ENGG/124/1998) Accredited by NAAC with ‘A’ Grade TELESCAN 2K19 TELESCAN 2019 Editorial Committee We, the students of Electronics & Telecommunication feel the privilege to present the Technical Departmental Magazine of Academic year- TELESCAN 2019 in front of you the magazine provides a platform for the students to express their technical knowledge and enhance their own technical knowledge. We would like to thank Dr.M.P.Sardey (HOD) and Prof. Santosh H Lavate for their constant support and encouraging us throughout the semester to make the magazine great hit. Editorial Team: Staff Co-ordinator: Sanmay Kamble (BE) Santosh H Lavate Abhishek Parte (BE) Supriya Lohar Nehal Gholse (TE) Ankush Muley (TE) TELESCAN 2019 VISION OF E&TC DEPARTMENT To provide quality education in Electronics & Telecommunication Engineering with professional ethics MISSION OF E&TC DEPATMENT To develop technical competency, ethics for professional growth and sense of social responsibility among students TELESCAN 2019 INDEX Sr No. Topic Page No. 1 3 Dimensional Integrated Circuit 1 2 4D Printer 4 3 5 Nanometer Semiconductor 5 4 AI: Changing The Face Of Defence 7 5 Artificial Intelligence 10 6 AI: A Boon Or A Bane 11 7 Block Chain 12 8 Blue Brain 14 9 Cobra Effect 16 10 A New Era In Industrial Production 18 11 Radiometry 20 12 Growing Need For Large Bank Of Test Item 21 13 The Project Loon 23 14 -
An New Type of Artificial Brain Using Controlled Neurons
New Developments in Neural Networks, J. R. Burger An New Type Of Artificial Brain Using Controlled Neurons John Robert Burger, Emeritus Professor, ECE Department, California State University Northridge, [email protected] Abstract -- Plans for a new type of artificial brain are possible because of realistic neurons in logically structured arrays of controlled toggles, one toggle per neuron. Controlled toggles can be made to compute, in parallel, parameters of critical importance for each of several complex images recalled from associative long term memory. Controlled toggles are shown below to amount to a new type of neural network that supports autonomous behavior and action. I. INTRODUCTION A brain-inspired system is proposed below in order to demonstrate the utility of electrically realistic neurons as controlled toggles. Plans for artificial brains are certainly not new [1, 2]. As in other such systems, the system below will monitor external information, analogous to that flowing from eyes, ears and other sensors. If the information is significant, for instance, bright spots, or loud passages, or if identical information is presented several times, it will automatically be committed to associative long term memory; it will automatically be memorized. External information is concurrently impressed on a short term memory, which is a logical row of short term memory neurons. From here cues are derived and held long enough to accomplish a search of associative long term memory. Unless the cues are very exacting indeed, several returned images are expected. Each return then undergoes calculations for priority; an image with maximum priority is imposed on (and overwrites the current contents of) short term memory. -

Is Google Making Us Stupid?
Is Google Making Us Stupid? What the Internet is doing to our brains Nicholas Carr Jul 1 2008, 12:00 PM ET "Dave, stop. Stop, will you? Stop, Dave. Will you stop, Dave?” So the supercomputer HAL pleads with the implacable astronaut Dave Bowman in a famous and weirdly poignant scene toward the end of Stanley Kubrick’s 2001: A Space Odyssey. Bowman, having nearly been sent to a deep-space death by the malfunctioning machine, is calmly, coldly disconnecting the memory circuits that control its artificial “ brain. “Dave, my mind is going,” HAL says, forlornly. “I can feel it. I can feel it.” I can feel it, too. Over the past few years I’ve had an uncomfortable sense that someone, or something, has been tinkering with my brain, remapping the neural circuitry, reprogramming the memory. My mind isn’t going—so far as I can tell—but it’s changing. I’m not thinking the way I used to think. I can feel it most strongly when I’m reading. Immersing myself in a book or a lengthy article used to be easy. My mind would get caught up in the narrative or the turns of the argument, and I’d spend hours strolling through long stretches of prose. That’s rarely the case anymore. Now my concentration often starts to drift after two or three pages. I get fidgety, lose the thread, and begin looking for something else to do. I feel as if I’m always dragging my wayward brain back to the text. The deep reading that used to come naturally has become a struggle. -

A World Survey of Artificial Brain Projects, Part II Biologically Inspired
Neurocomputing 74 (2010) 30–49 Contents lists available at ScienceDirect Neurocomputing journal homepage: www.elsevier.com/locate/neucom A world survey of artificial brain projects, Part II: Biologically inspired cognitive architectures Ben Goertzel a,b,n, Ruiting Lian b, Itamar Arel c, Hugo de Garis b, Shuo Chen b a Novamente LLC, 1405 Bernerd Place, Rockville, MD 20851, USA b Fujian Key Lab of the Brain-like Intelligent Systems, Xiamen University, Xiamen, China c Machine Intelligence Lab, Department of Electrical Engineering and Computer Science, University of Tennessee, Knoxville, USA article info abstract Available online 18 September 2010 A number of leading cognitive architectures that are inspired by the human brain, at various levels of Keywords: granularity, are reviewed and compared, with special attention paid to the way their internal structures Artificial brains and dynamics map onto neural processes. Four categories of Biologically Inspired Cognitive Cognitive architectures Architectures (BICAs) are considered, with multiple examples of each category briefly reviewed, and selected examples discussed in more depth: primarily symbolic architectures (e.g. ACT-R), emergentist architectures (e.g. DeSTIN), developmental robotics architectures (e.g. IM-CLEVER), and our central focus, hybrid architectures (e.g. LIDA, CLARION, 4D/RCS, DUAL, MicroPsi, and OpenCog). Given the state of the art in BICA, it is not yet possible to tell whether emulating the brain on the architectural level is going to be enough to allow rough emulation of brain function; and given the state of the art in neuroscience, it is not yet possible to connect BICAs with large-scale brain simulations in a thoroughgoing way. -

Upgrading Human Brain to Blue Brain
dicine e & N om a n n a o t N e f c o h Ganji and Nayana, J Nanomed Nanotechnol 2015, 6:3 l n Journal of a o n l o r g u DOI: 10.4172/2157-7439.1000287 y o J ISSN: 2157-7439 Nanomedicine & Nanotechnology Short Communication Open Access Upgrading Human Brain to Blue Brain Shruti Ganji* and Kamala Nayana Department of Information Technology (3/4), M.V.S.R Engineering College, Saroornagar Mandal, Nadargul, Hyderabad, Telangana 501510, India Abstract Blue brain is the name given to the world’s first virtual brain. That means a machine that can function as human brain. There is an attempt to create an artificial brain that can think, response, take decision, and keep anything in memory. The most important thing is to upload the contents of the normal brain into the computer or virtual brain with help of nanobots. Keywords: Blue; Virtual; Artificial brain; Nanobots Introduction In future, our brains are going to be attacked by the blue brain!! Yeah that’s right, but there is nothing to be worried, as it is going to be really useful for us. As sir Isaac Newton once said that we are like small kids on the sea shore, who are getting curious and excited by finding sea shells and fossils, but beyond the beach there is a huge ocean with diverse creatures and things yet to be discovered. Similarly he wants to say that in the field of technology, there are many things to be invented that might bring a drastic change in the field of science and technology [1]. -

Artificial Intelligence (AI)
Article Artificial Intelligence (AI) or Intelligence Augmentation (IA): What Is the Future? Hossein Hassani 1,* , Emmanuel Sirimal Silva 2 , Stephane Unger 3, Maedeh TajMazinani 4 and Stephen Mac Feely 5 1 Research Institute of Energy Management and Planning (RIEMP), University of Tehran, Tehran 1417466191, Iran 2 Centre for Fashion Business & Innovation Research, Fashion Business School, London College of Fashion, University of the Arts London, London WC1V 7EY, UK; [email protected] 3 Department of Economics and Business, Saint Anselm College, Manchester, NH 03102, USA; [email protected] 4 Department of Computer Science, University of Tehran, Tehran 1417466191, Iran; [email protected] 5 United Nations Conference on Trade and Development, Palais des Nations, Ch-1211 Geneva, Switzerland; [email protected] * Correspondence: [email protected] Received: 23 February 2020; Accepted: 3 April 2020; Published: 12 April 2020 Abstract: Artificial intelligence (AI) is a rapidly growing technological phenomenon that all industries wish to exploit to benefit from efficiency gains and cost reductions. At the macrolevel, AI appears to be capable of replacing humans by undertaking intelligent tasks that were once limited to the human mind. However, another school of thought suggests that instead of being a replacement for the human mind, AI can be used for intelligence augmentation (IA). Accordingly, our research seeks to address these different views, their implications, and potential risks in an age of increased artificial awareness. We show that the ultimate goal of humankind is to achieve IA through the exploitation of AI. Moreover, we articulate the urgent need for ethical frameworks that define how AI should be used to trigger the next level of IA. -

Limits of the Human Model in Understanding Artificial Intelligence
The Universe of Minds ROMAN V. YAMPOLSKIY Computer Engineering and Computer Science Speed School of Engineering University of Louisville, USA [email protected] Abstract The paper attempts to describe the space of possible mind designs by first equating all minds to software. Next it proves some interesting properties of the mind design space such as infinitude of minds, size and representation complexity of minds. A survey of mind design taxonomies is followed by a proposal for a new field of investigation devoted to study of minds, intellectology, a list of open problems for this new field is presented. Introduction In 1984 Aaron Sloman published “The Structure of the Space of Possible Minds” in which he described the task of providing an interdisciplinary description of that structure [1]. He observed that “behaving systems” clearly comprise more than one sort of mind and suggested that virtual machines may be a good theoretical tool for analyzing mind designs. Sloman indicated that there are many discontinuities within the space of minds meaning it is not a continuum, nor is it a dichotomy between things with minds and without minds [1]. Sloman wanted to see two levels of exploration namely: descriptive – surveying things different minds can do and exploratory – looking at how different virtual machines and their properties may explain results of the descriptive study [1]. Instead of trying to divide the universe into minds and non-minds he hoped to see examination of similarities and differences between systems. In this work we attempt to make another step towards this important goal. What is a mind? No universal definition exists. -

Associative Memory Realized by a Reconfigurable Memristive Hopfield
ARTICLE Received 30 Aug 2014 | Accepted 15 May 2015 | Published 25 Jun 2015 DOI: 10.1038/ncomms8522 Associative memory realized by a reconfigurable memristive Hopfield neural network S.G. Hu1,Y.Liu1, Z. Liu2, T.P. Chen3, J.J. Wang1,Q.Yu1, L.J. Deng1,Y.Yin4 & Sumio Hosaka4 Although synaptic behaviours of memristors have been widely demonstrated, implementa- tion of an even simple artificial neural network is still a great challenge. In this work, we demonstrate the associative memory on the basis of a memristive Hopfield network. Different patterns can be stored into the memristive Hopfield network by tuning the resistance of the memristors, and the pre-stored patterns can be successfully retrieved directly or through some associative intermediate states, being analogous to the associative memory behaviour. Both single-associative memory and multi-associative memories can be realized with the memristive Hopfield network. 1 State Key Laboratory of Electronic Thin Films and Integrated Devices, University of Electronic Science and Technology of China, Chengdu 610054, China. 2 School of Materials and Energy, Guangdong University of Technology, Guangzhou 510006, China. 3 School of Electrical and Electronic Engineering, Nanyang Technological University, Singapore 639798, Singapore. 4 Graduate School of Engineering, Gunma University, 1-5-1Tenjin, Kiryu, Gunma 376-8515, Japan. Correspondence and requests for materials should be addressed to Y.L. (email: [email protected]) or T.P.C. (email:[email protected]). NATURE COMMUNICATIONS | 6:7522 | DOI: 10.1038/ncomms8522 | www.nature.com/naturecommunications 1 & 2015 Macmillan Publishers Limited. All rights reserved. ARTICLE NATURE COMMUNICATIONS | DOI: 10.1038/ncomms8522 he idea of building a cognitive system that can adapt like a c 1 103 the biological brain has existed for a long time . -

The Whole Brain Architecture Approach: Accelerating the Development of Artificial General Intelligence by Referring to the Brain
The whole brain architecture approach: Accelerating the development of artificial general intelligence by referring to the brain Hiroshi Yamakawaa,b,c aThe Whole Brain Architecture Initiative, Nishikoiwa 2-19-21, Edogawa-ku, Tokyo, 133-0057, Japan bThe University of Tokyo, 7-3-1 Hongo, Bunkyo-ku, Tokyo 113-0033, Japan cRIKEN, 6-2-3, Furuedai, Suita, Osaka 565-0874, Japan Abstract The vastness of the design space created by the combination of a large num- ber of computational mechanisms, including machine learning, is an obstacle to creating an artificial general intelligence (AGI). Brain-inspired AGI devel- opment, in other words, cutting down the design space to look more like a biological brain, which is an existing model of a general intelligence, is a promis- ing plan for solving this problem. However, it is difficult for an individual to design a software program that corresponds to the entire brain because the neuroscientific data required to understand the architecture of the brain are extensive and complicated. The whole-brain architecture approach divides the brain-inspired AGI development process into the task of designing the brain reference architecture (BRA)|the flow of information and the diagram of cor- responding components|and the task of developing each component using the BRA. This is called BRA-driven development. Another difficulty lies in the extraction of the operating principles necessary for reproducing the cognitive- behavioral function of the brain from neuroscience data. Therefore, this study proposes the Structure-constrained Interface Decomposition (SCID) method, which is a hypothesis-building method for creating a hypothetical component diagram consistent with neuroscientific findings.