Notes on 2-Dimensional Spaces R Versus Euclidean 2-Space Linear Operators Upon R
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
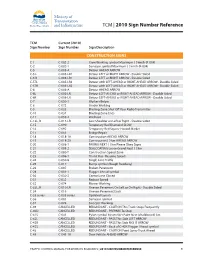
2010 Sign Number Reference for Traffic Control Manual
TCM | 2010 Sign Number Reference TCM Current (2010) Sign Number Sign Number Sign Description CONSTRUCTION SIGNS C-1 C-002-2 Crew Working symbol Maximum ( ) km/h (R-004) C-2 C-002-1 Surveyor symbol Maximum ( ) km/h (R-004) C-5 C-005-A Detour AHEAD ARROW C-5 L C-005-LR1 Detour LEFT or RIGHT ARROW - Double Sided C-5 R C-005-LR1 Detour LEFT or RIGHT ARROW - Double Sided C-5TL C-005-LR2 Detour with LEFT-AHEAD or RIGHT-AHEAD ARROW - Double Sided C-5TR C-005-LR2 Detour with LEFT-AHEAD or RIGHT-AHEAD ARROW - Double Sided C-6 C-006-A Detour AHEAD ARROW C-6L C-006-LR Detour LEFT-AHEAD or RIGHT-AHEAD ARROW - Double Sided C-6R C-006-LR Detour LEFT-AHEAD or RIGHT-AHEAD ARROW - Double Sided C-7 C-050-1 Workers Below C-8 C-072 Grader Working C-9 C-033 Blasting Zone Shut Off Your Radio Transmitter C-10 C-034 Blasting Zone Ends C-11 C-059-2 Washout C-13L, R C-013-LR Low Shoulder on Left or Right - Double Sided C-15 C-090 Temporary Red Diamond SLOW C-16 C-092 Temporary Red Square Hazard Marker C-17 C-051 Bridge Repair C-18 C-018-1A Construction AHEAD ARROW C-19 C-018-2A Construction ( ) km AHEAD ARROW C-20 C-008-1 PAVING NEXT ( ) km Please Obey Signs C-21 C-008-2 SEALCOATING Loose Gravel Next ( ) km C-22 C-080-T Construction Speed Zone C-23 C-086-1 Thank You - Resume Speed C-24 C-030-8 Single Lane Traffic C-25 C-017 Bump symbol (Rough Roadway) C-26 C-007 Broken Pavement C-28 C-001-1 Flagger Ahead symbol C-30 C-030-2 Centre Lane Closed C-31 C-032 Reduce Speed C-32 C-074 Mower Working C-33L, R C-010-LR Uneven Pavement On Left or On Right - Double Sided C-34 -

Higher Dimensional Conundra
Higher Dimensional Conundra Steven G. Krantz1 Abstract: In recent years, especially in the subject of harmonic analysis, there has been interest in geometric phenomena of RN as N → +∞. In the present paper we examine several spe- cific geometric phenomena in Euclidean space and calculate the asymptotics as the dimension gets large. 0 Introduction Typically when we do geometry we concentrate on a specific venue in a particular space. Often the context is Euclidean space, and often the work is done in R2 or R3. But in modern work there are many aspects of analysis that are linked to concrete aspects of geometry. And there is often interest in rendering the ideas in Hilbert space or some other infinite dimensional setting. Thus we want to see how the finite-dimensional result in RN changes as N → +∞. In the present paper we study some particular aspects of the geometry of RN and their asymptotic behavior as N →∞. We choose these particular examples because the results are surprising or especially interesting. We may hope that they will lead to further studies. It is a pleasure to thank Richard W. Cottle for a careful reading of an early draft of this paper and for useful comments. 1 Volume in RN Let us begin by calculating the volume of the unit ball in RN and the surface area of its bounding unit sphere. We let ΩN denote the former and ωN−1 denote the latter. In addition, we let Γ(x) be the celebrated Gamma function of L. Euler. It is a helpful intuition (which is literally true when x is an 1We are happy to thank the American Institute of Mathematics for its hospitality and support during this work. -

Glossary of Linear Algebra Terms
INNER PRODUCT SPACES AND THE GRAM-SCHMIDT PROCESS A. HAVENS 1. The Dot Product and Orthogonality 1.1. Review of the Dot Product. We first recall the notion of the dot product, which gives us a familiar example of an inner product structure on the real vector spaces Rn. This product is connected to the Euclidean geometry of Rn, via lengths and angles measured in Rn. Later, we will introduce inner product spaces in general, and use their structure to define general notions of length and angle on other vector spaces. Definition 1.1. The dot product of real n-vectors in the Euclidean vector space Rn is the scalar product · : Rn × Rn ! R given by the rule n n ! n X X X (u; v) = uiei; viei 7! uivi : i=1 i=1 i n Here BS := (e1;:::; en) is the standard basis of R . With respect to our conventions on basis and matrix multiplication, we may also express the dot product as the matrix-vector product 2 3 v1 6 7 t î ó 6 . 7 u v = u1 : : : un 6 . 7 : 4 5 vn It is a good exercise to verify the following proposition. Proposition 1.1. Let u; v; w 2 Rn be any real n-vectors, and s; t 2 R be any scalars. The Euclidean dot product (u; v) 7! u · v satisfies the following properties. (i:) The dot product is symmetric: u · v = v · u. (ii:) The dot product is bilinear: • (su) · v = s(u · v) = u · (sv), • (u + v) · w = u · w + v · w. -

Properties of Euclidean Space
Section 3.1 Properties of Euclidean Space As has been our convention throughout this course, we use the notation R2 to refer to the plane (two dimensional space); R3 for three dimensional space; and Rn to indicate n dimensional space. Alternatively, these spaces are often referred to as Euclidean spaces; for example, \three dimensional Euclidean space" refers to R3. In this section, we will point out many of the special features common to the Euclidean spaces; in Chapter 4, we will see that many of these features are shared by other \spaces" as well. Many of the graphics in this section are drawn in two dimensions (largely because this is the easiest space to visualize on paper), but you should be aware that the ideas presented apply to n dimensional Euclidean space, not just to two dimensional space. Vectors in Euclidean Space When we refer to a vector in Euclidean space, we mean directed line segments that are embedded in the space, such as the vector pictured below in R2: We often refer to a vector, such as the vector AB shown below, by its initial and terminal points; in this example, A is the initial point of AB, and B is the terminal point of the vector. While we often think of n dimensional space as being made up of points, we may equivalently consider it to be made up of vectors by identifying points and vectors. For instance, we identify the point (2; 1) in two dimensional Euclidean space with the vector with initial point (0; 0) and terminal point (2; 1): 1 Section 3.1 In this way, we think of n dimensional Euclidean space as being made up of n dimensional vectors. -

Calculus Terminology
AP Calculus BC Calculus Terminology Absolute Convergence Asymptote Continued Sum Absolute Maximum Average Rate of Change Continuous Function Absolute Minimum Average Value of a Function Continuously Differentiable Function Absolutely Convergent Axis of Rotation Converge Acceleration Boundary Value Problem Converge Absolutely Alternating Series Bounded Function Converge Conditionally Alternating Series Remainder Bounded Sequence Convergence Tests Alternating Series Test Bounds of Integration Convergent Sequence Analytic Methods Calculus Convergent Series Annulus Cartesian Form Critical Number Antiderivative of a Function Cavalieri’s Principle Critical Point Approximation by Differentials Center of Mass Formula Critical Value Arc Length of a Curve Centroid Curly d Area below a Curve Chain Rule Curve Area between Curves Comparison Test Curve Sketching Area of an Ellipse Concave Cusp Area of a Parabolic Segment Concave Down Cylindrical Shell Method Area under a Curve Concave Up Decreasing Function Area Using Parametric Equations Conditional Convergence Definite Integral Area Using Polar Coordinates Constant Term Definite Integral Rules Degenerate Divergent Series Function Operations Del Operator e Fundamental Theorem of Calculus Deleted Neighborhood Ellipsoid GLB Derivative End Behavior Global Maximum Derivative of a Power Series Essential Discontinuity Global Minimum Derivative Rules Explicit Differentiation Golden Spiral Difference Quotient Explicit Function Graphic Methods Differentiable Exponential Decay Greatest Lower Bound Differential -

About Symmetries in Physics
LYCEN 9754 December 1997 ABOUT SYMMETRIES IN PHYSICS Dedicated to H. Reeh and R. Stora1 Fran¸cois Gieres Institut de Physique Nucl´eaire de Lyon, IN2P3/CNRS, Universit´eClaude Bernard 43, boulevard du 11 novembre 1918, F - 69622 - Villeurbanne CEDEX Abstract. The goal of this introduction to symmetries is to present some general ideas, to outline the fundamental concepts and results of the subject and to situate a bit the following arXiv:hep-th/9712154v1 16 Dec 1997 lectures of this school. [These notes represent the write-up of a lecture presented at the fifth S´eminaire Rhodanien de Physique “Sur les Sym´etries en Physique” held at Dolomieu (France), 17-21 March 1997. Up to the appendix and the graphics, it is to be published in Symmetries in Physics, F. Gieres, M. Kibler, C. Lucchesi and O. Piguet, eds. (Editions Fronti`eres, 1998).] 1I wish to dedicate these notes to my diploma and Ph.D. supervisors H. Reeh and R. Stora who devoted a major part of their scientific work to the understanding, description and explo- ration of symmetries in physics. Contents 1 Introduction ................................................... .......1 2 Symmetries of geometric objects ...................................2 3 Symmetries of the laws of nature ..................................5 1 Geometric (space-time) symmetries .............................6 2 Internal symmetries .............................................10 3 From global to local symmetries ...............................11 4 Combining geometric and internal symmetries ...............14 -

A Partition Property of Simplices in Euclidean Space
JOURNAL OF THE AMERICAN MATHEMATICAL SOCIETY Volume 3, Number I, January 1990 A PARTITION PROPERTY OF SIMPLICES IN EUCLIDEAN SPACE P. FRANKL AND V. RODL 1. INTRODUCTION AND STATEMENT OF THE RESULTS Let ]Rn denote n-dimensional Euclidean space endowed with the standard metric. For x, y E ]Rn , their distance is denoted by Ix - yl. Definition 1.1 [E]. A subset B of ]Rd is called Ramsey if for every r ~ 2 there exists some n = n(r, B) with the following partition property. For every partition ]Rn = V; u ... U ~ , there exists some j, 1::::; j ::::; r, and Bj C fj such that B is congruent to Bj • In a series of papers, Erdos et al. [E] have investigated this property. They have shown that all Ramsey sets are spherical, that is, every Ramsey set is con- tained in an appropriate sphere. On the other hand, they have shown that the vertex set (and, therefore, all its subsets) of bricks (d-dimensional paral- lelepipeds) is Ramsey. The simplest sets that are spherical but cannot be embedded into the vertex set of a brick are the sets of obtuse triangles. In [FR 1], it is shown that they are indeed Ramsey, using Ramsey's Theorem (cf. [G2]) and the Product Theorem of [E]. The aim of the present paper is twofold. First, we want to show that the vertex set of every nondegenerate simplex in any dimension is Ramsey. Second, we want to show that for both simplices and bricks, and even for their products, one can in fact choose n(r, B) = c(B)logr, where c(B) is an appropriate positive constant. -

Rotation Matrix - Wikipedia, the Free Encyclopedia Page 1 of 22
Rotation matrix - Wikipedia, the free encyclopedia Page 1 of 22 Rotation matrix From Wikipedia, the free encyclopedia In linear algebra, a rotation matrix is a matrix that is used to perform a rotation in Euclidean space. For example the matrix rotates points in the xy -Cartesian plane counterclockwise through an angle θ about the origin of the Cartesian coordinate system. To perform the rotation, the position of each point must be represented by a column vector v, containing the coordinates of the point. A rotated vector is obtained by using the matrix multiplication Rv (see below for details). In two and three dimensions, rotation matrices are among the simplest algebraic descriptions of rotations, and are used extensively for computations in geometry, physics, and computer graphics. Though most applications involve rotations in two or three dimensions, rotation matrices can be defined for n-dimensional space. Rotation matrices are always square, with real entries. Algebraically, a rotation matrix in n-dimensions is a n × n special orthogonal matrix, i.e. an orthogonal matrix whose determinant is 1: . The set of all rotation matrices forms a group, known as the rotation group or the special orthogonal group. It is a subset of the orthogonal group, which includes reflections and consists of all orthogonal matrices with determinant 1 or -1, and of the special linear group, which includes all volume-preserving transformations and consists of matrices with determinant 1. Contents 1 Rotations in two dimensions 1.1 Non-standard orientation -

1 Sets and Set Notation. Definition 1 (Naive Definition of a Set)
LINEAR ALGEBRA MATH 2700.006 SPRING 2013 (COHEN) LECTURE NOTES 1 Sets and Set Notation. Definition 1 (Naive Definition of a Set). A set is any collection of objects, called the elements of that set. We will most often name sets using capital letters, like A, B, X, Y , etc., while the elements of a set will usually be given lower-case letters, like x, y, z, v, etc. Two sets X and Y are called equal if X and Y consist of exactly the same elements. In this case we write X = Y . Example 1 (Examples of Sets). (1) Let X be the collection of all integers greater than or equal to 5 and strictly less than 10. Then X is a set, and we may write: X = f5; 6; 7; 8; 9g The above notation is an example of a set being described explicitly, i.e. just by listing out all of its elements. The set brackets {· · ·} indicate that we are talking about a set and not a number, sequence, or other mathematical object. (2) Let E be the set of all even natural numbers. We may write: E = f0; 2; 4; 6; 8; :::g This is an example of an explicity described set with infinitely many elements. The ellipsis (:::) in the above notation is used somewhat informally, but in this case its meaning, that we should \continue counting forever," is clear from the context. (3) Let Y be the collection of all real numbers greater than or equal to 5 and strictly less than 10. Recalling notation from previous math courses, we may write: Y = [5; 10) This is an example of using interval notation to describe a set. -

THE NUMBER of ⊕-SIGN TYPES Jian-Yi Shi Department Of
THE NUMBER OF © -SIGN TYPES Jian-yi Shi Department of Mathematics, East China Normal University Shanghai, 200062, P.R.C. In [6], the author introduced the concept of a sign type indexed by the set f(i; j) j 1 · i; j · n; i 6= jg for the description of the cells in the affine Weyl group of type Ae` ( in the sense of Kazhdan and Lusztig [3] ) . Later, the author generalized it by defining a sign type indexed by any root system [8]. Since then, sign type has played a more and more important role in the study of the cells of any irreducible affine Weyl group [1],[2],[5],[8],[9],[10],[12]. Thus it is worth to study sign type itself. One task is to enumerate various kinds of sign types. In [8], the author verified Carter’s conjecture on the number of all sign types indexed by any irreducible root system. In the present paper, we consider some special kind of sign types, called ©-sign types. We show that these sign types are in one-to-one correspondence with the increasing subsets of the related positive root system as a partially ordered set. Thus we get the number of all the ©-sign types indexed by any irreducible positive root system Φ+ by enumerating all the increasing subsets Key words and phrases. © -sign types, increasing subsets, Young diagram. Supported by the National Science Foundation of China and by the Science Foundation of the University Doctorial Program of CNEC Typeset by AMS-TEX 1 2 JIAN.YI-SHI of Φ+. -

Sign of the Derivative TEACHER NOTES MATH NSPIRED
Sign of the Derivative TEACHER NOTES MATH NSPIRED Math Objectives • Students will make a connection between the sign of the derivative (positive/negative/zero) and the increasing or decreasing nature of the graph. Activity Type • Student Exploration About the Lesson TI-Nspire™ Technology Skills: • Students will move a point on a function and observe the changes • Download a TI-Nspire in the sign of the derivative. Based on observations, students will document answer questions on a worksheet. In the second part of the • Open a document investigation, students will move the point and see a trace of the • Move between pages derivative to connect the positive or negative sign of the • Grab and drag a point derivative with the location on the coordinate plane. Tech Tips: Directions • Make sure the font size on • Grab the point on the function and move it along the curve. your TI-Nspire handheld is Observe the relationship between the sign of the derivative and set to Medium. the direction of the graph. • You can hide the function entry line by pressing /G. Lesson Materials: Student Activity Sign_of_the_Derivative_Student .pdf Sign_of_the_Derivative_Student .doc TI-Nspire document Sign_of_the_Derivative.tns Visit www.mathnspired.com for lesson updates. ©2010 DANIEL R. ILARIA, PH.D 1 Used with permission Sign of the Derivative TEACHER NOTES MATH NSPIRED Discussion Points and Possible Answers PART I: Move to page 1.3. Tech Tips: The sign of the derivative will indicate negative when the function is decreasing and positive when the function is increasing. The screen will also indicate a zero derivative. Students will need to edit the function on the screen in order to investigate other functions. -

Euclidean Space - Wikipedia, the Free Encyclopedia Page 1 of 5
Euclidean space - Wikipedia, the free encyclopedia Page 1 of 5 Euclidean space From Wikipedia, the free encyclopedia In mathematics, Euclidean space is the Euclidean plane and three-dimensional space of Euclidean geometry, as well as the generalizations of these notions to higher dimensions. The term “Euclidean” distinguishes these spaces from the curved spaces of non-Euclidean geometry and Einstein's general theory of relativity, and is named for the Greek mathematician Euclid of Alexandria. Classical Greek geometry defined the Euclidean plane and Euclidean three-dimensional space using certain postulates, while the other properties of these spaces were deduced as theorems. In modern mathematics, it is more common to define Euclidean space using Cartesian coordinates and the ideas of analytic geometry. This approach brings the tools of algebra and calculus to bear on questions of geometry, and Every point in three-dimensional has the advantage that it generalizes easily to Euclidean Euclidean space is determined by three spaces of more than three dimensions. coordinates. From the modern viewpoint, there is essentially only one Euclidean space of each dimension. In dimension one this is the real line; in dimension two it is the Cartesian plane; and in higher dimensions it is the real coordinate space with three or more real number coordinates. Thus a point in Euclidean space is a tuple of real numbers, and distances are defined using the Euclidean distance formula. Mathematicians often denote the n-dimensional Euclidean space by , or sometimes if they wish to emphasize its Euclidean nature. Euclidean spaces have finite dimension. Contents 1 Intuitive overview 2 Real coordinate space 3 Euclidean structure 4 Topology of Euclidean space 5 Generalizations 6 See also 7 References Intuitive overview One way to think of the Euclidean plane is as a set of points satisfying certain relationships, expressible in terms of distance and angle.