A CONCISE MINI HISTORY of GEOMETRY 1. Origin And
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Lesson 3: Rectangles Inscribed in Circles
NYS COMMON CORE MATHEMATICS CURRICULUM Lesson 3 M5 GEOMETRY Lesson 3: Rectangles Inscribed in Circles Student Outcomes . Inscribe a rectangle in a circle. Understand the symmetries of inscribed rectangles across a diameter. Lesson Notes Have students use a compass and straightedge to locate the center of the circle provided. If necessary, remind students of their work in Module 1 on constructing a perpendicular to a segment and of their work in Lesson 1 in this module on Thales’ theorem. Standards addressed with this lesson are G-C.A.2 and G-C.A.3. Students should be made aware that figures are not drawn to scale. Classwork Scaffolding: Opening Exercise (9 minutes) Display steps to construct a perpendicular line at a point. Students follow the steps provided and use a compass and straightedge to find the center of a circle. This exercise reminds students about constructions previously . Draw a segment through the studied that are needed in this lesson and later in this module. point, and, using a compass, mark a point equidistant on Opening Exercise each side of the point. Using only a compass and straightedge, find the location of the center of the circle below. Label the endpoints of the Follow the steps provided. segment 퐴 and 퐵. Draw chord 푨푩̅̅̅̅. Draw circle 퐴 with center 퐴 . Construct a chord perpendicular to 푨푩̅̅̅̅ at and radius ̅퐴퐵̅̅̅. endpoint 푩. Draw circle 퐵 with center 퐵 . Mark the point of intersection of the perpendicular chord and the circle as point and radius ̅퐵퐴̅̅̅. 푪. Label the points of intersection . -

Squaring the Circle a Case Study in the History of Mathematics the Problem
Squaring the Circle A Case Study in the History of Mathematics The Problem Using only a compass and straightedge, construct for any given circle, a square with the same area as the circle. The general problem of constructing a square with the same area as a given figure is known as the Quadrature of that figure. So, we seek a quadrature of the circle. The Answer It has been known since 1822 that the quadrature of a circle with straightedge and compass is impossible. Notes: First of all we are not saying that a square of equal area does not exist. If the circle has area A, then a square with side √A clearly has the same area. Secondly, we are not saying that a quadrature of a circle is impossible, since it is possible, but not under the restriction of using only a straightedge and compass. Precursors It has been written, in many places, that the quadrature problem appears in one of the earliest extant mathematical sources, the Rhind Papyrus (~ 1650 B.C.). This is not really an accurate statement. If one means by the “quadrature of the circle” simply a quadrature by any means, then one is just asking for the determination of the area of a circle. This problem does appear in the Rhind Papyrus, but I consider it as just a precursor to the construction problem we are examining. The Rhind Papyrus The papyrus was found in Thebes (Luxor) in the ruins of a small building near the Ramesseum.1 It was purchased in 1858 in Egypt by the Scottish Egyptologist A. -

The Geometry of Diagonal Groups
The geometry of diagonal groups R. A. Baileya, Peter J. Camerona, Cheryl E. Praegerb, Csaba Schneiderc aUniversity of St Andrews, St Andrews, UK bUniversity of Western Australia, Perth, Australia cUniversidade Federal de Minas Gerais, Belo Horizonte, Brazil Abstract Diagonal groups are one of the classes of finite primitive permutation groups occurring in the conclusion of the O'Nan{Scott theorem. Several of the other classes have been described as the automorphism groups of geometric or combi- natorial structures such as affine spaces or Cartesian decompositions, but such structures for diagonal groups have not been studied in general. The main purpose of this paper is to describe and characterise such struct- ures, which we call diagonal semilattices. Unlike the diagonal groups in the O'Nan{Scott theorem, which are defined over finite characteristically simple groups, our construction works over arbitrary groups, finite or infinite. A diagonal semilattice depends on a dimension m and a group T . For m = 2, it is a Latin square, the Cayley table of T , though in fact any Latin square satisfies our combinatorial axioms. However, for m > 3, the group T emerges naturally and uniquely from the axioms. (The situation somewhat resembles projective geometry, where projective planes exist in great profusion but higher- dimensional structures are coordinatised by an algebraic object, a division ring.) A diagonal semilattice is contained in the partition lattice on a set Ω, and we provide an introduction to the calculus of partitions. Many of the concepts and constructions come from experimental design in statistics. We also determine when a diagonal group can be primitive, or quasiprimitive (these conditions turn out to be equivalent for diagonal groups). -

History of Mathematics
Georgia Department of Education History of Mathematics K-12 Mathematics Introduction The Georgia Mathematics Curriculum focuses on actively engaging the students in the development of mathematical understanding by using manipulatives and a variety of representations, working independently and cooperatively to solve problems, estimating and computing efficiently, and conducting investigations and recording findings. There is a shift towards applying mathematical concepts and skills in the context of authentic problems and for the student to understand concepts rather than merely follow a sequence of procedures. In mathematics classrooms, students will learn to think critically in a mathematical way with an understanding that there are many different ways to a solution and sometimes more than one right answer in applied mathematics. Mathematics is the economy of information. The central idea of all mathematics is to discover how knowing some things well, via reasoning, permit students to know much else—without having to commit the information to memory as a separate fact. It is the reasoned, logical connections that make mathematics coherent. The implementation of the Georgia Standards of Excellence in Mathematics places a greater emphasis on sense making, problem solving, reasoning, representation, connections, and communication. History of Mathematics History of Mathematics is a one-semester elective course option for students who have completed AP Calculus or are taking AP Calculus concurrently. It traces the development of major branches of mathematics throughout history, specifically algebra, geometry, number theory, and methods of proofs, how that development was influenced by the needs of various cultures, and how the mathematics in turn influenced culture. The course extends the numbers and counting, algebra, geometry, and data analysis and probability strands from previous courses, and includes a new history strand. -

A Comparison of Differential Calculus and Differential Geometry in Two
1 A Two-Dimensional Comparison of Differential Calculus and Differential Geometry Andrew Grossfield, Ph.D Vaughn College of Aeronautics and Technology Abstract and Introduction: Plane geometry is mainly the study of the properties of polygons and circles. Differential geometry is the study of curves that can be locally approximated by straight line segments. Differential calculus is the study of functions. These functions of calculus can be viewed as single-valued branches of curves in a coordinate system where the horizontal variable controls the vertical variable. In both studies the derivative multiplies incremental changes in the horizontal variable to yield incremental changes in the vertical variable and both studies possess the same rules of differentiation and integration. It seems that the two studies should be identical, that is, isomorphic. And, yet, students should be aware of important differences. In differential geometry, the horizontal and vertical units have the same dimensional units. In differential calculus the horizontal and vertical units are usually different, e.g., height vs. time. There are differences in the two studies with respect to the distance between points. In differential geometry, the Pythagorean slant distance formula prevails, while in the 2- dimensional plane of differential calculus there is no concept of slant distance. The derivative has a different meaning in each of the two subjects. In differential geometry, the slope of the tangent line determines the direction of the tangent line; that is, the angle with the horizontal axis. In differential calculus, there is no concept of direction; instead, the derivative describes a rate of change. In differential geometry the line described by the equation y = x subtends an angle, α, of 45° with the horizontal, but in calculus the linear relation, h = t, bears no concept of direction. -

Simple Polygons Scribe: Michael Goldwasser
CS268: Geometric Algorithms Handout #5 Design and Analysis Original Handout #15 Stanford University Tuesday, 25 February 1992 Original Lecture #6: 28 January 1991 Topics: Triangulating Simple Polygons Scribe: Michael Goldwasser Algorithms for triangulating polygons are important tools throughout computa- tional geometry. Many problems involving polygons are simplified by partitioning the complex polygon into triangles, and then working with the individual triangles. The applications of such algorithms are well documented in papers involving visibility, motion planning, and computer graphics. The following notes give an introduction to triangulations and many related definitions and basic lemmas. Most of the definitions are based on a simple polygon, P, containing n edges, and hence n vertices. However, many of the definitions and results can be extended to a general arrangement of n line segments. 1 Diagonals Definition 1. Given a simple polygon, P, a diagonal is a line segment between two non-adjacent vertices that lies entirely within the interior of the polygon. Lemma 2. Every simple polygon with jPj > 3 contains a diagonal. Proof: Consider some vertex v. If v has a diagonal, it’s party time. If not then the only vertices visible from v are its neighbors. Therefore v must see some single edge beyond its neighbors that entirely spans the sector of visibility, and therefore v must be a convex vertex. Now consider the two neighbors of v. Since jPj > 3, these cannot be neighbors of each other, however they must be visible from each other because of the above situation, and thus the segment connecting them is indeed a diagonal. -

Higher Dimensional Conundra
Higher Dimensional Conundra Steven G. Krantz1 Abstract: In recent years, especially in the subject of harmonic analysis, there has been interest in geometric phenomena of RN as N → +∞. In the present paper we examine several spe- cific geometric phenomena in Euclidean space and calculate the asymptotics as the dimension gets large. 0 Introduction Typically when we do geometry we concentrate on a specific venue in a particular space. Often the context is Euclidean space, and often the work is done in R2 or R3. But in modern work there are many aspects of analysis that are linked to concrete aspects of geometry. And there is often interest in rendering the ideas in Hilbert space or some other infinite dimensional setting. Thus we want to see how the finite-dimensional result in RN changes as N → +∞. In the present paper we study some particular aspects of the geometry of RN and their asymptotic behavior as N →∞. We choose these particular examples because the results are surprising or especially interesting. We may hope that they will lead to further studies. It is a pleasure to thank Richard W. Cottle for a careful reading of an early draft of this paper and for useful comments. 1 Volume in RN Let us begin by calculating the volume of the unit ball in RN and the surface area of its bounding unit sphere. We let ΩN denote the former and ωN−1 denote the latter. In addition, we let Γ(x) be the celebrated Gamma function of L. Euler. It is a helpful intuition (which is literally true when x is an 1We are happy to thank the American Institute of Mathematics for its hospitality and support during this work. -

20. Geometry of the Circle (SC)
20. GEOMETRY OF THE CIRCLE PARTS OF THE CIRCLE Segments When we speak of a circle we may be referring to the plane figure itself or the boundary of the shape, called the circumference. In solving problems involving the circle, we must be familiar with several theorems. In order to understand these theorems, we review the names given to parts of a circle. Diameter and chord The region that is encompassed between an arc and a chord is called a segment. The region between the chord and the minor arc is called the minor segment. The region between the chord and the major arc is called the major segment. If the chord is a diameter, then both segments are equal and are called semi-circles. The straight line joining any two points on the circle is called a chord. Sectors A diameter is a chord that passes through the center of the circle. It is, therefore, the longest possible chord of a circle. In the diagram, O is the center of the circle, AB is a diameter and PQ is also a chord. Arcs The region that is enclosed by any two radii and an arc is called a sector. If the region is bounded by the two radii and a minor arc, then it is called the minor sector. www.faspassmaths.comIf the region is bounded by two radii and the major arc, it is called the major sector. An arc of a circle is the part of the circumference of the circle that is cut off by a chord. -

Properties of Euclidean Space
Section 3.1 Properties of Euclidean Space As has been our convention throughout this course, we use the notation R2 to refer to the plane (two dimensional space); R3 for three dimensional space; and Rn to indicate n dimensional space. Alternatively, these spaces are often referred to as Euclidean spaces; for example, \three dimensional Euclidean space" refers to R3. In this section, we will point out many of the special features common to the Euclidean spaces; in Chapter 4, we will see that many of these features are shared by other \spaces" as well. Many of the graphics in this section are drawn in two dimensions (largely because this is the easiest space to visualize on paper), but you should be aware that the ideas presented apply to n dimensional Euclidean space, not just to two dimensional space. Vectors in Euclidean Space When we refer to a vector in Euclidean space, we mean directed line segments that are embedded in the space, such as the vector pictured below in R2: We often refer to a vector, such as the vector AB shown below, by its initial and terminal points; in this example, A is the initial point of AB, and B is the terminal point of the vector. While we often think of n dimensional space as being made up of points, we may equivalently consider it to be made up of vectors by identifying points and vectors. For instance, we identify the point (2; 1) in two dimensional Euclidean space with the vector with initial point (0; 0) and terminal point (2; 1): 1 Section 3.1 In this way, we think of n dimensional Euclidean space as being made up of n dimensional vectors. -
Unit 6 Visualising Solid Shapes(Final)
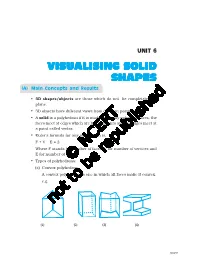
• 3D shapes/objects are those which do not lie completely in a plane. • 3D objects have different views from different positions. • A solid is a polyhedron if it is made up of only polygonal faces, the faces meet at edges which are line segments and the edges meet at a point called vertex. • Euler’s formula for any polyhedron is, F + V – E = 2 Where F stands for number of faces, V for number of vertices and E for number of edges. • Types of polyhedrons: (a) Convex polyhedron A convex polyhedron is one in which all faces make it convex. e.g. (1) (2) (3) (4) 12/04/18 (1) and (2) are convex polyhedrons whereas (3) and (4) are non convex polyhedron. (b) Regular polyhedra or platonic solids: A polyhedron is regular if its faces are congruent regular polygons and the same number of faces meet at each vertex. For example, a cube is a platonic solid because all six of its faces are congruent squares. There are five such solids– tetrahedron, cube, octahedron, dodecahedron and icosahedron. e.g. • A prism is a polyhedron whose bottom and top faces (known as bases) are congruent polygons and faces known as lateral faces are parallelograms (when the side faces are rectangles, the shape is known as right prism). • A pyramid is a polyhedron whose base is a polygon and lateral faces are triangles. • A map depicts the location of a particular object/place in relation to other objects/places. The front, top and side of a figure are shown. Use centimetre cubes to build the figure. -

About Symmetries in Physics
LYCEN 9754 December 1997 ABOUT SYMMETRIES IN PHYSICS Dedicated to H. Reeh and R. Stora1 Fran¸cois Gieres Institut de Physique Nucl´eaire de Lyon, IN2P3/CNRS, Universit´eClaude Bernard 43, boulevard du 11 novembre 1918, F - 69622 - Villeurbanne CEDEX Abstract. The goal of this introduction to symmetries is to present some general ideas, to outline the fundamental concepts and results of the subject and to situate a bit the following arXiv:hep-th/9712154v1 16 Dec 1997 lectures of this school. [These notes represent the write-up of a lecture presented at the fifth S´eminaire Rhodanien de Physique “Sur les Sym´etries en Physique” held at Dolomieu (France), 17-21 March 1997. Up to the appendix and the graphics, it is to be published in Symmetries in Physics, F. Gieres, M. Kibler, C. Lucchesi and O. Piguet, eds. (Editions Fronti`eres, 1998).] 1I wish to dedicate these notes to my diploma and Ph.D. supervisors H. Reeh and R. Stora who devoted a major part of their scientific work to the understanding, description and explo- ration of symmetries in physics. Contents 1 Introduction ................................................... .......1 2 Symmetries of geometric objects ...................................2 3 Symmetries of the laws of nature ..................................5 1 Geometric (space-time) symmetries .............................6 2 Internal symmetries .............................................10 3 From global to local symmetries ...............................11 4 Combining geometric and internal symmetries ...............14 -

Riemann's Contribution to Differential Geometry
View metadata, citation and similar papers at core.ac.uk brought to you by CORE provided by Elsevier - Publisher Connector Historia Mathematics 9 (1982) l-18 RIEMANN'S CONTRIBUTION TO DIFFERENTIAL GEOMETRY BY ESTHER PORTNOY UNIVERSITY OF ILLINOIS AT URBANA-CHAMPAIGN, URBANA, IL 61801 SUMMARIES In order to make a reasonable assessment of the significance of Riemann's role in the history of dif- ferential geometry, not unduly influenced by his rep- utation as a great mathematician, we must examine the contents of his geometric writings and consider the response of other mathematicians in the years immedi- ately following their publication. Pour juger adkquatement le role de Riemann dans le developpement de la geometric differentielle sans etre influence outre mesure par sa reputation de trks grand mathematicien, nous devons &udier le contenu de ses travaux en geometric et prendre en consideration les reactions des autres mathematiciens au tours de trois an&es qui suivirent leur publication. Urn Riemann's Einfluss auf die Entwicklung der Differentialgeometrie richtig einzuschZtzen, ohne sich von seinem Ruf als bedeutender Mathematiker iiberm;issig beeindrucken zu lassen, ist es notwendig den Inhalt seiner geometrischen Schriften und die Haltung zeitgen&sischer Mathematiker unmittelbar nach ihrer Verijffentlichung zu untersuchen. On June 10, 1854, Georg Friedrich Bernhard Riemann read his probationary lecture, "iber die Hypothesen welche der Geometrie zu Grunde liegen," before the Philosophical Faculty at Gdttingen ill. His biographer, Dedekind [1892, 5491, reported that Riemann had worked hard to make the lecture understandable to nonmathematicians in the audience, and that the result was a masterpiece of presentation, in which the ideas were set forth clearly without the aid of analytic techniques.