SCOUT: a Modular, Multi-Mission Spacecraft Architecture for High Capability Rapid Access to Space
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

L AUNCH SYSTEMS Databk7 Collected.Book Page 18 Monday, September 14, 2009 2:53 PM Databk7 Collected.Book Page 19 Monday, September 14, 2009 2:53 PM
databk7_collected.book Page 17 Monday, September 14, 2009 2:53 PM CHAPTER TWO L AUNCH SYSTEMS databk7_collected.book Page 18 Monday, September 14, 2009 2:53 PM databk7_collected.book Page 19 Monday, September 14, 2009 2:53 PM CHAPTER TWO L AUNCH SYSTEMS Introduction Launch systems provide access to space, necessary for the majority of NASA’s activities. During the decade from 1989–1998, NASA used two types of launch systems, one consisting of several families of expendable launch vehicles (ELV) and the second consisting of the world’s only partially reusable launch system—the Space Shuttle. A significant challenge NASA faced during the decade was the development of technologies needed to design and implement a new reusable launch system that would prove less expensive than the Shuttle. Although some attempts seemed promising, none succeeded. This chapter addresses most subjects relating to access to space and space transportation. It discusses and describes ELVs, the Space Shuttle in its launch vehicle function, and NASA’s attempts to develop new launch systems. Tables relating to each launch vehicle’s characteristics are included. The other functions of the Space Shuttle—as a scientific laboratory, staging area for repair missions, and a prime element of the Space Station program—are discussed in the next chapter, Human Spaceflight. This chapter also provides a brief review of launch systems in the past decade, an overview of policy relating to launch systems, a summary of the management of NASA’s launch systems programs, and tables of funding data. The Last Decade Reviewed (1979–1988) From 1979 through 1988, NASA used families of ELVs that had seen service during the previous decade. -

The Annual Compendium of Commercial Space Transportation: 2012
Federal Aviation Administration The Annual Compendium of Commercial Space Transportation: 2012 February 2013 About FAA About the FAA Office of Commercial Space Transportation The Federal Aviation Administration’s Office of Commercial Space Transportation (FAA AST) licenses and regulates U.S. commercial space launch and reentry activity, as well as the operation of non-federal launch and reentry sites, as authorized by Executive Order 12465 and Title 51 United States Code, Subtitle V, Chapter 509 (formerly the Commercial Space Launch Act). FAA AST’s mission is to ensure public health and safety and the safety of property while protecting the national security and foreign policy interests of the United States during commercial launch and reentry operations. In addition, FAA AST is directed to encourage, facilitate, and promote commercial space launches and reentries. Additional information concerning commercial space transportation can be found on FAA AST’s website: http://www.faa.gov/go/ast Cover art: Phil Smith, The Tauri Group (2013) NOTICE Use of trade names or names of manufacturers in this document does not constitute an official endorsement of such products or manufacturers, either expressed or implied, by the Federal Aviation Administration. • i • Federal Aviation Administration’s Office of Commercial Space Transportation Dear Colleague, 2012 was a very active year for the entire commercial space industry. In addition to all of the dramatic space transportation events, including the first-ever commercial mission flown to and from the International Space Station, the year was also a very busy one from the government’s perspective. It is clear that the level and pace of activity is beginning to increase significantly. -

Launch Options for the Future: a Buyer's Guide (Part 7 Of
— Chapter 3 Enhanced Baseline CONTENTS , Page Improving the Shuttle . 27 Advanced Solid Rocket Motors (ASRMs) . 27 Liquid Rocket Boosters (LRBs) . 28 Lighter Tanks . 29 Improving Shuttle Ground Operations . 29 Improving Existing ELVs . 29 Delta . 30 Atlas-Centaur . ● ● . .* . 30 Titan . ● . ✎ ✎ . 30 Capability . ✎ . ✎ ✎ . ● ✎ ✎ . 30 Table 3-1. Theoretical Lift Capability of Enhanced U.S. Launch Systems. 31 Chapter 3 Enhanced Baseline The ENHANCED BASELINE option is the U.S. Government’s “Best Buy” if . it desires a space program with current or slightly greater levels of activity. By making in- cremental improvements to existing launch vehicles, production and launch facilities, the U.S. could increase its launch capacity to about 1.4 million pounds per year to LEO. The investment required would be low compared to building new vehicles; however, the ade- quacy of the resulting fleet resiliency and dependability is uncertain. This option would not provide the low launch costs (e.g. 10 percent of current costs) sought for SDI deploy- ment or an aggressive civilian space initiative, like a piloted mission to Mars, IMPROVING THE SHUTTLE The Shuttle, though a remarkable tech- . reducing the number of factory joints and nological achievement, never achieved its in- the number of parts, tended payload capacity and recent safety . designing the ASRMs so that the Space modifications have further degraded its per- Shuttle Main Engines no longer need to formance by approximately 4,800 pounds. be throttled during the region of maxi- Advanced Solid Rocket Motors (ASRMs) or mum dynamic pressure, Liquid Rocket Boosters (LRBs) have the potential to restore some of this perfor- ● replacing asbestos-bearing materials, mance; studies on both are underway. -

The Evolving Launch Vehicle Market Supply and the Effect on Future NASA Missions
Presented at the 2007 ISPA/SCEA Joint Annual International Conference and Workshop - www.iceaaonline.com The Evolving Launch Vehicle Market Supply and the Effect on Future NASA Missions Presented at the 2007 ISPA/SCEA Joint International Conference & Workshop June 12-15, New Orleans, LA Bob Bitten, Debra Emmons, Claude Freaner 1 Presented at the 2007 ISPA/SCEA Joint Annual International Conference and Workshop - www.iceaaonline.com Abstract • The upcoming retirement of the Delta II family of launch vehicles leaves a performance gap between small expendable launch vehicles, such as the Pegasus and Taurus, and large vehicles, such as the Delta IV and Atlas V families • This performance gap may lead to a variety of progressions including – large satellites that utilize the full capability of the larger launch vehicles, – medium size satellites that would require dual manifesting on the larger vehicles or – smaller satellites missions that would require a large number of smaller launch vehicles • This paper offers some comparative costs of co-manifesting single- instrument missions on a Delta IV/Atlas V, versus placing several instruments on a larger bus and using a Delta IV/Atlas V, as well as considering smaller, single instrument missions launched on a Minotaur or Taurus • This paper presents the results of a parametric study investigating the cost- effectiveness of different alternatives and their effect on future NASA missions that fall into the Small Explorer (SMEX), Medium Explorer (MIDEX), Earth System Science Pathfinder (ESSP), Discovery, -

10/2/95 Rev EXECUTIVE SUMMARY This Report, Entitled "Hazard
10/2/95 rev EXECUTIVE SUMMARY This report, entitled "Hazard Analysis of Commercial Space Transportation," is devoted to the review and discussion of generic hazards associated with the ground, launch, orbital and re-entry phases of space operations. Since the DOT Office of Commercial Space Transportation (OCST) has been charged with protecting the public health and safety by the Commercial Space Act of 1984 (P.L. 98-575), it must promulgate and enforce appropriate safety criteria and regulatory requirements for licensing the emerging commercial space launch industry. This report was sponsored by OCST to identify and assess prospective safety hazards associated with commercial launch activities, the involved equipment, facilities, personnel, public property, people and environment. The report presents, organizes and evaluates the technical information available in the public domain, pertaining to the nature, severity and control of prospective hazards and public risk exposure levels arising from commercial space launch activities. The US Government space- operational experience and risk control practices established at its National Ranges serve as the basis for this review and analysis. The report consists of three self-contained, but complementary, volumes focusing on Space Transportation: I. Operations; II. Hazards; and III. Risk Analysis. This Executive Summary is attached to all 3 volumes, with the text describing that volume highlighted. Volume I: Space Transportation Operations provides the technical background and terminology, as well as the issues and regulatory context, for understanding commercial space launch activities and the associated hazards. Chapter 1, The Context for a Hazard Analysis of Commercial Space Activities, discusses the purpose, scope and organization of the report in light of current national space policy and the DOT/OCST regulatory mission. -

The Creation of the Delta 180 Program and Its Follow-Ons
JOHN DASSOULAS and MICHAEL D. GRIFFIN THE CREATION OF THE DELTA 180 PROGRAM AND ITS FOLLOW-ONS The Delta 180 Program was spawned by a rare conjunction of circumstances: a major national need; the new, forward-looking Strategic Defense Initiative Organization; available funding; adaptable hard ware; and, most important of all, an innovative and imaginative group of people in government, in in dustry, and at APL that became the Delta 180 team. This team became a driving force in the follow-on Delta 181, Delta 183, and MSX programs. DELTA 180 The Strategic Defense Initiative Organization (SOlO), "What can you do in a year?" This turned our think in its early days and with only a limited technical staff ing around completely, and we began to consider things in place, urgently needed the assistance of other govern we could lay our hands on. Returning from a meeting mental and not-for-profit organizations with experience in Washington, D.C., we laid out some ground rilles that in space and weapons systems. David Finkelman, on might allow the mission to be done in a year. We as loan from the Army Missile Command and who had sumed (1) it would not be a shuttle launch (payload in worked with APL before, met with members of APL'S tegration and safety requirements for a manned space Fleet Systems and Space Departments and the Director's flight would take too long to satisfy), (2) it would be Office on 17 April 1984. Samuel Koslov was charged necessary to use only existing technology, and (3) only to see whether some low level of technical support could minimal documentation could be tolerated. -

The Delta Launch Vehicle- Past, Present, and Future
The Space Congress® Proceedings 1981 (18th) The Year of the Shuttle Apr 1st, 8:00 AM The Delta Launch Vehicle- Past, Present, and Future J. K. Ganoung Manager Spacecraft Integration, McDonnell Douglas Astronautics Co. H. Eaton Delta Launch Program, McDonnell Douglas Astronautics Co. Follow this and additional works at: https://commons.erau.edu/space-congress-proceedings Scholarly Commons Citation Ganoung, J. K. and Eaton, H., "The Delta Launch Vehicle- Past, Present, and Future" (1981). The Space Congress® Proceedings. 7. https://commons.erau.edu/space-congress-proceedings/proceedings-1981-18th/session-6/7 This Event is brought to you for free and open access by the Conferences at Scholarly Commons. It has been accepted for inclusion in The Space Congress® Proceedings by an authorized administrator of Scholarly Commons. For more information, please contact [email protected]. THE DELTA LAUNCH VEHICLE - PAST, PRESENT AND FUTURE J. K. Ganoung, Manager H. Eaton, Jr., Director Spacecraft Integration Delta Launch Program McDonnell Douglas Astronautics Co. McDonnell Douglas Astronautics Co. INTRODUCTION an "interim space launch vehicle." The THOR was to be modified for use as the first stage, the The Delta launch vehicle is a medium class Vanguard second stage propulsion system, was used expendable booster managed by the NASA Goddard as the Delta second stage and the Vanguard solid Space Flight Center and used by the U.S. rocket motor became Delta's third stage. Government, private industry and foreign coun Following the eighteen month development program tries to launch scientific, meteorological, and failure to launch its first payload into or applications and communications satellites. -

Development of a Commercial Expendable Launch Vehicle Industry
The Space Congress® Proceedings 1988 (25th) Heritage - Dedication - Vision Apr 1st, 8:00 AM Development of A Commercial Expendable Launch Vehicle Industry Barbara A. Stone Director of Plans, Policy & Evaluation Division, Office of Commercial Programs, National Aeronautics and Space Administration, Washington, DC 20546 John L. Emond Plans, Policy & Evaluation Division, Office of Commercial Programs, National Aeronautics and Space Administration, Washington, DC 20546 Follow this and additional works at: https://commons.erau.edu/space-congress-proceedings Scholarly Commons Citation Stone, Barbara A. and Emond, John L., "Development of A Commercial Expendable Launch Vehicle Industry" (1988). The Space Congress® Proceedings. 4. https://commons.erau.edu/space-congress-proceedings/proceedings-1988-25th/session-1/4 This Event is brought to you for free and open access by the Conferences at Scholarly Commons. It has been accepted for inclusion in The Space Congress® Proceedings by an authorized administrator of Scholarly Commons. For more information, please contact [email protected]. DEVELOPMENT OF A COMMERCIAL EXPENDABLE LAUNCH VEHICLE INDUSTRY Barbara A. Stone r Ph.D. Director of Plans, Policy & Evaluation Division Office of Commercial Programs National Aeronautics and Space Administration Washington, DC 20546 and John L. Emond Plans, Policy & Evaluation Division Office of Commercial Programs National Aeronautics and Space Administration Washington, DC 20546 POLICY BACKGROUND A ground rule in the development of the Shuttle was that expendable launch vehicles (ELV) would be phased out and eventually terminated and that the Shuttle would be the single transportation system for the nation. Subse quently, President Reagan announced a National Space Policy on July 4, 1982, which called for continuation of U.S. -

Chronology of NASA Expendable Vehicle Missions Since 1990
Chronology of NASA Expendable Vehicle Missions Since 1990 Launch Launch Date Payload Vehicle Site1 June 1, 1990 ROSAT (Roentgen Satellite) Delta II ETR, 5:48 p.m. EDT An X-ray observatory developed through a cooperative program between Germany, the U.S., and (Delta 195) LC 17A the United Kingdom. Originally proposed by the Max-Planck-Institut für extraterrestrische Physik (MPE) and designed, built and operated in Germany. Launched into Earth orbit on a U.S. Air Force vehicle. Mission ended after almost nine years, on Feb. 12, 1999. July 25, 1990 CRRES (Combined Radiation and Release Effects Satellite) Atlas I ETR, 3:21 p.m. EDT NASA payload. Launched into a geosynchronous transfer orbit for a nominal three-year mission to (AC-69) LC 36B investigate fields, plasmas, and energetic particles inside the Earth's magnetosphere. Due to onboard battery failure, contact with the spacecraft was lost on Oct. 12, 1991. May 14, 1991 NOAA-D (TIROS) (National Oceanic and Atmospheric Administration-D) Atlas-E WTR, 11:52 a.m. EDT A Television Infrared Observing System (TIROS) satellite. NASA-developed payload; USAF (Atlas 50-E) SLC 4 vehicle. Launched into sun-synchronous polar orbit to allow the satellite to view the Earth's entire surface and cloud cover every 12 hours. Redesignated NOAA-12 once in orbit. June 29, 1991 REX (Radiation Experiment) Scout 216 WTR, 10:00 a.m. EDT USAF payload; NASA vehicle. Launched into 450 nm polar orbit. Designed to study scintillation SLC 5 effects of the Earth's atmosphere on RF transmissions. 114th launch of Scout vehicle. -
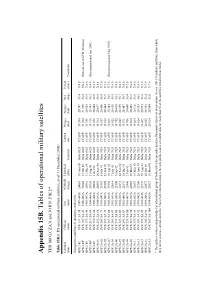
Appendix 15B. Tables of Operational Military Satellites TED MOLCZAN and JOHN PIKE*
Appendix 15B. Tables of operational military satellites TED MOLCZAN and JOHN PIKE* Table 15B.1. US operational military satellites, as of 31 December 2002a Common Official Intl NORAD Launched Launch Perigee Apogee Incl. Period name name name design. (date) Launcher site (km) (km) (deg.) (min.) Comments Navigation satellites in medium earth orbit GPS 2-02 SVN 13/USA 38 1989-044A 20061 10 June 89 Delta 6925 CCAFS 19 594 20 787 53.4 718.0 GPS 2-04b SVN 19/USA 47 1989-085A 20302 21 Oct 89 Delta 6925 CCAFS 21 204 21 238 53.4 760.2 (Retired, not in SEM Almanac) GPS 2-05 SVN 17/USA 49 1989-097A 20361 11 Dec 89 Delta 6925 CCAFS 19 795 20 583 55.9 718.0 GPS 2-08b SVN 21/USA 63 1990-068A 20724 2 Aug 90 Delta 6925 CCAFS 19 716 20 705 56.2 718.8 (Decommissioned Jan. 2003) GPS 2-09 SVN 15/USA 64 1990-088A 20830 1 Oct 90 Delta 6925 CCAFS 19 978 20 404 55.8 718.0 GPS 2A-01 SVN 23/USA 66 1990-103A 20959 26 Nov 90 Delta 6925 CCAFS 19 764 20 637 56.4 718.4 GPS 2A-02 SVN 24/USA 71 1991-047A 21552 4 July 91 Delta 7925 CCAFS 19 927 20 450 56.0 717.9 GPS 2A-03 SVN 25/USA 79 1992-009A 21890 23 Feb 92 Delta 7925 CCAFS 19 913 20 464 53.9 717.9 GPS 2A-04b SVN 28/USA 80 1992-019A 21930 10 Apr 92 Delta 7925 CCAFS 20 088 20 284 54.5 717.8 (Decommissioned May 1997) GPS 2A-05 SVN 26/USA 83 1992-039A 22014 7 July 92 Delta 7925 CCAFS 19 822 20 558 55.9 718.0 GPS 2A-06 SVN 27/USA 84 1992-058A 22108 9 Sep 92 Delta 7925 CCAFS 19 742 20 638 54.1 718.0 GPS 2A-07 SVN 32/USA 85 1992-079A 22231 22 Nov 92 Delta 7925 CCAFS 20 042 20 339 55.7 718.0 GPS 2A-08 SVN 29/USA 87 1992-089A -

19960024281.Pdf
NASA Technical Paper 3615 Review of Our National Heritage of Launch VehiclesUsing Aerodynamic Surfaces and Current Use of These by Other Nations (Center Director's Discretionary Fund Project Number 93-05Part II) C. Barret April 1996 NASA Technical Paper 3615 Review of Our National Heritage of Launch VehiclesUsing Aerodynamic Surfaces and Current Use of These by Other Nations (Center Director's Discretionary Fund Project Number 93-05Part II) C. Barret Marshall Space Flight Center • MSFC, Alabama National Aeronautics and Space Administration Marshall Space Flight Center ° MSFC, Alabama 35812 April 1996 TABLE OF CONTENTS Page I. INTRODUCTION .................................................................................................................. 1 A. Background ....................................................................................................................... 1 B. Problem Statement ............................................................................................................ 1 C. Approach ........................................................................................................................... 2 II° REVIEW OF NATIONAL HERITAGE OF LAUNCH VEHICLES USING AERODYNAMIC SURFACES TO PROVIDE FLIGHT STABILITY AND CONTROL ............................................................................................................................. 3 A. Dr. Wemher von Braun's V-2 .......................................................................................... 4 B. Pershing ........................................................................................................................... -

Launch Vehicle Family Album
he pictures on the next several pages serve as a Launch Vehicle Tpartial "family album" of NASA launch vehicles. NASA did not develop all of the vehicles shown, but Family Album has employed each in its goal of "exploring the atmosphere and space for peaceful purposes for the benefit of all." The album contains historic rockets, those in use today, and concept designs that might be used in the future. They are arranged in three groups: rockets for launching satellites and space probes, rockets for launching humans into space, and concepts for future vehicles. The album tells the story of nearly 40 years of NASA space transportation. Rockets have probed the upper reaches of Earth's atmosphere, carried spacecraft into Earth orbit, and sent spacecraft out into the solar system and beyond. Initial rockets employed by NASA, such as the Redstone and the Atlas, began life as intercontinental ballistic missiles. NASA scientists and engineers found them ideal for carrying machine and human payloads into space. As the need for greater payload capacity increased, NASA began altering designs for its own rockets and building upper stages to use with existing rockets. Sending astronauts to the Moon required a bigger rocket than the rocket needed for carrying a small satellite to Earth orbit. Today, NASA's only vehicle for lifting astronauts into space is the Space Shuttle. Designed to be reusable, its solid rocket boosters have parachute recovery systems. The orbiter is a winged spacecraft that glides back to Earth. The external tank is the only part of the vehicle which has to be replaced for each mission.