Innovative Running Gear Solutions for New Dependable, Sustainable, Intelligent and Comfortable Rail Vehicles
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

East Japan Railway Company Shin-Hakodate-Hokuto
ANNUAL REPORT 2017 For the year ended March 31, 2017 Pursuing We have been pursuing initiatives in light of the Group Philosophy since 1987. Annual Report 2017 1 Tokyo 1988 2002 We have been pursuing our Eternal Mission while broadening our Unlimited Potential. 1988* 2002 Operating Revenues Operating Revenues ¥1,565.7 ¥2,543.3 billion billion Operating Revenues Operating Income Operating Income Operating Income ¥307.3 ¥316.3 billion billion Transportation (“Railway” in FY1988) 2017 Other Operations (in FY1988) Retail & Services (“Station Space Utilization” in FY2002–2017) Real Estate & Hotels * Fiscal 1988 figures are nonconsolidated. (“Shopping Centers & Office Buildings” in FY2002–2017) Others (in FY2002–2017) Further, other operations include bus services. April 1987 July 1992 March 1997 November 2001 February 2002 March 2004 Establishment of Launch of the Launch of the Akita Launch of Launch of the Station Start of Suica JR East Yamagata Shinkansen Shinkansen Suica Renaissance program with electronic money Tsubasa service Komachi service the opening of atré Ueno service 2 East Japan Railway Company Shin-Hakodate-Hokuto Shin-Aomori 2017 Hachinohe Operating Revenues ¥2,880.8 billion Akita Morioka Operating Income ¥466.3 billion Shinjo Yamagata Sendai Niigata Fukushima Koriyama Joetsumyoko Shinkansen (JR East) Echigo-Yuzawa Conventional Lines (Kanto Area Network) Conventional Lines (Other Network) Toyama Nagano BRT (Bus Rapid Transit) Lines Kanazawa Utsunomiya Shinkansen (Other JR Companies) Takasaki Mito Shinkansen (Under Construction) (As of June 2017) Karuizawa Omiya Tokyo Narita Airport Hachioji Chiba 2017Yokohama Transportation Retail & Services Real Estate & Hotels Others Railway Business, Bus Services, Retail Sales, Restaurant Operations, Shopping Center Operations, IT & Suica business such as the Cleaning Services, Railcar Advertising & Publicity, etc. -

Case of High-Speed Ground Transportation Systems
MANAGING PROJECTS WITH STRONG TECHNOLOGICAL RUPTURE Case of High-Speed Ground Transportation Systems THESIS N° 2568 (2002) PRESENTED AT THE CIVIL ENGINEERING DEPARTMENT SWISS FEDERAL INSTITUTE OF TECHNOLOGY - LAUSANNE BY GUILLAUME DE TILIÈRE Civil Engineer, EPFL French nationality Approved by the proposition of the jury: Prof. F.L. Perret, thesis director Prof. M. Hirt, jury director Prof. D. Foray Prof. J.Ph. Deschamps Prof. M. Finger Prof. M. Bassand Lausanne, EPFL 2002 MANAGING PROJECTS WITH STRONG TECHNOLOGICAL RUPTURE Case of High-Speed Ground Transportation Systems THÈSE N° 2568 (2002) PRÉSENTÉE AU DÉPARTEMENT DE GÉNIE CIVIL ÉCOLE POLYTECHNIQUE FÉDÉRALE DE LAUSANNE PAR GUILLAUME DE TILIÈRE Ingénieur Génie-Civil diplômé EPFL de nationalité française acceptée sur proposition du jury : Prof. F.L. Perret, directeur de thèse Prof. M. Hirt, rapporteur Prof. D. Foray, corapporteur Prof. J.Ph. Deschamps, corapporteur Prof. M. Finger, corapporteur Prof. M. Bassand, corapporteur Document approuvé lors de l’examen oral le 19.04.2002 Abstract 2 ACKNOWLEDGEMENTS I would like to extend my deep gratitude to Prof. Francis-Luc Perret, my Supervisory Committee Chairman, as well as to Prof. Dominique Foray for their enthusiasm, encouragements and guidance. I also express my gratitude to the members of my Committee, Prof. Jean-Philippe Deschamps, Prof. Mathias Finger, Prof. Michel Bassand and Prof. Manfred Hirt for their comments and remarks. They have contributed to making this multidisciplinary approach more pertinent. I would also like to extend my gratitude to our Research Institute, the LEM, the support of which has been very helpful. Concerning the exchange program at ITS -Berkeley (2000-2001), I would like to acknowledge the support of the Swiss National Science Foundation. -

Unit VI Superconductivity JIT Nashik Contents
Unit VI Superconductivity JIT Nashik Contents 1 Superconductivity 1 1.1 Classification ............................................. 1 1.2 Elementary properties of superconductors ............................... 2 1.2.1 Zero electrical DC resistance ................................. 2 1.2.2 Superconducting phase transition ............................... 3 1.2.3 Meissner effect ........................................ 3 1.2.4 London moment ....................................... 4 1.3 History of superconductivity ...................................... 4 1.3.1 London theory ........................................ 5 1.3.2 Conventional theories (1950s) ................................ 5 1.3.3 Further history ........................................ 5 1.4 High-temperature superconductivity .................................. 6 1.5 Applications .............................................. 6 1.6 Nobel Prizes for superconductivity .................................. 7 1.7 See also ................................................ 7 1.8 References ............................................... 8 1.9 Further reading ............................................ 10 1.10 External links ............................................. 10 2 Meissner effect 11 2.1 Explanation .............................................. 11 2.2 Perfect diamagnetism ......................................... 12 2.3 Consequences ............................................. 12 2.4 Paradigm for the Higgs mechanism .................................. 12 2.5 See also ............................................... -

Opening of Tohoku Shinkansen Extension to Shin Aomori and Development of New Faster Carriages—Overview of Series E5/E6 Shinichiro Tajima
Expansion of High-Speed Rail Services Opening of Tohoku Shinkansen Extension to Shin Aomori and Development of New Faster Carriages—Overview of Series E5/E6 Shinichiro Tajima Introduction FASTECH 360 Z were started in June 2010. These carriages will be coupled with Series E5 carriages in commercial In preparation for the December 2010 opening of the Tohoku operation to run at 320 km/h. Shinkansen extension to Shin Aomori, JR East worked steadily from 2002 on technologies to increase speed, Path to Speed Increase finally settling on a commercial operating speed of 320 km/h after various considerations, including running tests using The Tohoku Shinkansen started operation in 1982 at a the FASTECH 360 test train. Furthermore, Series E5 pre- maximum speed of 210 km/h. Today, the commercial production models were built to determine the specifications operation speed is 275 km/h but 20 years have passed since of carriages used for commercial operations; running tests the first 275 km/h operation with Series 200 carriages on the confirmed the final specifications ahead of introduction of the Joetsu Shinkansen in 1990. Full-scale operation at 275 km/h Series E5 in spring 2011. Moreover, Series E6 pre-production started with the introduction of the E3 and E2 at the opening models reflecting development successes using the of the Akita Shinkansen and Nagano Shinkansen in 1997. Figure 1 Path to Speed Increase km/h 450 JNR JR 425 km/h (STAR21, 1993) Max. test speed 400 345.8 km/h (400 series, 1991) 350 319 km/h 320 km/h (961 series, 1979) 300 km/h (2013) (2011) 300 275 km/h (1990) Max. -
Electrical Energy Utilisation
Jacek F. Gieras Izabella A.Gieras Electrical Energy Utilisation Wydawnictwo Adam Marszalek Contents Preface ........................................................VII 1 ENERGY AND DRIVES .................................. 1 1.1 Electrical energy . 1 1.2 Conservation of electrical energy . 2 1.3 Classification of electric motors . 4 1.4 Applications of electric motor drives . 5 1.5 Trends in the electric-motor and drives industry . 11 1.6 How many motors are used in affluent homes ? . 11 1.7 Fundamentals of mechanics of machines . 12 1.7.1 Torque and power . 12 1.7.2 Simple gear trains . 12 1.7.3 Efficiency of a gear train . 14 1.7.4 Equivalent moment of inertia . 14 1.8 Torque equation . 18 1.9 Mechanical characteristics of machines . 19 Problems . 21 2 D.C. MOTORS ............................................ 23 2.1 Construction . 23 2.2 Fundamental equations. 24 2.2.1 Terminal voltage . 24 2.2.2 Armature winding EMF . 25 2.2.3 Magnetic flux . 25 2.2.4 Electromagnetic (developed) torque . 25 2.2.5 Electromagnetic power . 26 2.2.6 Rotor and commutator linear speed . 26 2.2.7 Input and output power . 26 2.2.8 Losses . 27 2.2.9 Armature line current density . 28 2.3 D.c. shunt motor . 28 VI Contents 2.4 D.c. series motor . 30 2.5 Compound-wound motor . 31 2.6 Starting . 32 2.7 Speed control of d.c. motors . 34 2.8 Braking . 36 2.8.1 Braking a shunt d.c. motor . 37 2.8.2 Braking a series d.c. motor . 37 2.9 Permanent magnet d.c. -

Shinkansen - Wikipedia 7/3/20, 10�48 AM
Shinkansen - Wikipedia 7/3/20, 10)48 AM Shinkansen The Shinkansen (Japanese: 新幹線, pronounced [ɕiŋkaꜜɰ̃ seɴ], lit. ''new trunk line''), colloquially known in English as the bullet train, is a network of high-speed railway lines in Japan. Initially, it was built to connect distant Japanese regions with Tokyo, the capital, in order to aid economic growth and development. Beyond long-distance travel, some sections around the largest metropolitan areas are used as a commuter rail network.[1][2] It is operated by five Japan Railways Group companies. A lineup of JR East Shinkansen trains in October Over the Shinkansen's 50-plus year history, carrying 2012 over 10 billion passengers, there has been not a single passenger fatality or injury due to train accidents.[3] Starting with the Tōkaidō Shinkansen (515.4 km, 320.3 mi) in 1964,[4] the network has expanded to currently consist of 2,764.6 km (1,717.8 mi) of lines with maximum speeds of 240–320 km/h (150– 200 mph), 283.5 km (176.2 mi) of Mini-Shinkansen lines with a maximum speed of 130 km/h (80 mph), and 10.3 km (6.4 mi) of spur lines with Shinkansen services.[5] The network presently links most major A lineup of JR West Shinkansen trains in October cities on the islands of Honshu and Kyushu, and 2008 Hakodate on northern island of Hokkaido, with an extension to Sapporo under construction and scheduled to commence in March 2031.[6] The maximum operating speed is 320 km/h (200 mph) (on a 387.5 km section of the Tōhoku Shinkansen).[7] Test runs have reached 443 km/h (275 mph) for conventional rail in 1996, and up to a world record 603 km/h (375 mph) for SCMaglev trains in April 2015.[8] The original Tōkaidō Shinkansen, connecting Tokyo, Nagoya and Osaka, three of Japan's largest cities, is one of the world's busiest high-speed rail lines. -

Development of Next-Generation Tilting Train by Hybrid Tilt System A
Development of Next-generation Tilting Train by Hybrid Tilt System A.Shikimura1, T. Inaba1, H.Kakinuma1, I.Sato1, Y.Sato1, K.Sasaki2, M.Hirayama3 1Hokkaido Railway Company, Sapporo, Japan; 2Railway Technical Research Institute, Kokubunji, Japan; 3Kawasaki Heavy Industries, Ltd., Kobe, Japan [Abstract] To shorten train arrival time in existing railway lines (with a gauge of 1067mm), JR Hokkaido has improved running speed and acceleration and deceleration performance by solving Hokkaido’s regional problems of heavy snowfall and extremely severe cold and developed the capability to run on a curve section by our specific tilt-controlled vehicle system. Furthermore, to improve curving performance, this operating company developed “hybrid tilt system,” which can achieve a car body tilt angle of 8 degrees, by introducing the conventional “tilt system (curve guide type, tilt angle of 6 degrees)” and an “air spring car body tilt system (tilt angle of 2 degrees)” combined in cooperative control. This system is characterized by the reduction in tilt angel to 6 degrees on a curve in the conventional tilt-controlled system and another tilt angle of 2 degrees in a new tilting mechanism comprising the air spring on the outer rail side, thereby reducing the centrifugal force on a passenger. Meanwhile, since the motion of the center of gravity toward the outer rail side can be reduced by 25%, passenger’s riding comfort can be improved, which cannot be achieved in a single natural tilting vehicle with the same tilt angle. This paper outlines “hybrid tilt system” in this development project and provides cooperative control method for the 2 systems and the results of a stationary test. -

Survey on Different Classification
International Conference On Recent Trends In Engineering Science And Management ISBN: 978-81-931039-2-0 Jawaharlal Nehru University, Convention Center, New Delhi (India), 15 March 2015 www.conferenceworld.in SURVEY ON DIFFERENT CLASSIFICATION TECHNIQUES FOR DETECTION OF FAKE PROFILES IN SOCIAL NETWORKS Ameena A1, Reeba R2 1,2, Department of Computer Science And Engineering, Sree Buddha College Of Engineering, Pattoor (India) ABSTRACT In the present generation, the social life of everyone has become associated with the online social networking sites. But with their rapid growth, many problems like fake profiles, online impersonation have also grown. There are no feasible solution exist to control these problems. In this paper, survey on different classification techniques for detection of fake profiles in social networks is proposed. This paper presents the classification techniques like Support Vector Machine, Naive Bayes and Decision trees to classify the profiles into fake or genuine classes. This classification techniques can be used as a framework for automatic detection of fake profiles, it can be applied easily by online social networks which has millions of profile whose profiles cannot be examined manually. Keywords : SVM, SNS, Decision Tree, Naive Bayes Classification, Support Vector Machine I. INTRODUCTION Social Networking Sites (SNS) are web-based services that facilitates individuals to construct a profile, which is either public or semi-public. SNS contains list of users with whom we can share a connection, view their activities in network and also converse. SNS users communicate by messages, blogs, chatting, video and music files. SNS also have many disadvantages such as information is public, security problem, cyber bullying and misuse and abuse of SNS platform. -

Open Sound Data Catalog Created on 2021/04/17 19:22:02
Open Sound Data Catalog https://desktopstation.net/sounds/ Created on 2021/04/17 19:22:02 This catalog introduces a list of locomotives and sound data available on Open Sound Data, a project for distributing Japanese-style sound data for digital model railroads (DCC). Use of the data is free of charge, but compliance with the terms and conditions is required. Please refer to the Open Sound Data website for more information. Old Kokuden Type nose suspension drive Provided by MB3110A@zhengdao_X The sound of a suspended motor is something that we cannot hear around us anymore. The ESU sound decoder fulfilled my wish that the nostalgic sound of the suspension motor would remain in service forever. The sound source is based on the running sound of Tobu 3050 series, and various operation sounds such as old auxiliary equipment are added to make it highly versatile. The sound source is based on the running sound of Tobu 3050 series. This data can be used with the LokSound V4 series and LokSound 5 series, but the LokSound V4 rescue version has some limitations in sound quality and functions. URL https://desktopstation.net/sounds/osd2.html Kiha 40 series diesel car Provided by MB3110A@zhengdao_X, Tochigi General Rolling Stock Office This is the sound of the DMF15HSA internal combustion engine (original engine) used in the Kiha40 series. I wanted to preserve the sound of the original engine in a model, so I combined the sound recorded by MB3110A with my own sound. I would be happy if you could run it with the diesel sound. -

Part 2: Speeding-Up Conventional Lines and Shinkansen Asahi Mochizuki
Breakthrough in Japanese Railways 9 JRTR Speed-up Story 2 Part 2: Speeding-up Conventional Lines and Shinkansen Asahi Mochizuki Reducing Journey Times on is limited by factors such as curves, grades, and turnouts, so Conventional Lines scheduled speed can only be increased by focusing effort on increasing speed at these locations. Distribution of factors limiting speed Many of the intercity railways in Japan are lines in The maximum speed of any line is determined by emergency mountainous areas. So, objectives for increasing speeds braking distance. However, train speeds are also restricted by cannot be achieved by simply raising the maximum speed. various other factors, such as curves, grades, and turnouts. Acceleration and deceleration performance also impact Speed-up on curves journey time. The impact of each element depends on the The basic measures for increasing speeds on curves are terrain of the line. The following graphs show the distributions lowering the centre of gravity of rolling stock and canting the of these elements for the Joban Line, crossing relatively flat track. However, these measures have already been applied land, and for the eastern section of the Chuo Line, running fully; cant cannot be increased on lines serving slow freight through mountains. trains with a high centre of gravity. Conversely, increasing The graph for the Joban Line crossing the flat Kanto passenger train speed through curves to just below the limit Plain shows that it runs at the maximum speed of 120 km/h where the trains could overturn causes reduced ride comfort (M part) for about half the journey time. -
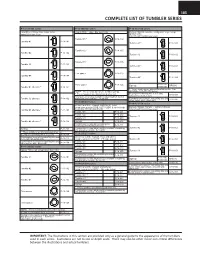
Complete List of Tumbler Series
185 COMPLETE LIST OF TUMBLER SERIES P-14-141/164 series P-14-194/196 series P-16-141/144 series Land Rover, Range Rover door locks Jaguar Tibbe – glove box locks only Datsun / Nissan, Subaru - using 6 cut keys except using X170 type keys ignition locks (X6-X7-62DT-62DU type keys) Tumbler #1 * P-14-194 Tumbler #1 P-14-141 Tumbler #1 * P-16-141 Tumbler #2 * P-14-195 Tumbler #2 P-14-142 Tumbler #2 * P-16-142 Tumbler #3 * P-14-196 Tumbler #3 P-14-143 Tumbler #3 * P-16-143 Thin spacer P-18-125 Tumbler #4 P-14-144 Tumbler #4 * P-16-144 P-16-105 Thick spacer P-18-126 Springs RP6546 Tumbler #1 alternate * P-14-161 P-00-100 * These tumblers are discontinued when out. Can NOTE: These locks do not use tumbler springs. substitute P-16-151/154 series Keying kit containing this series only * These tumblers are discontinued when out. A-16-104 Keying kit previously available containing both normal (discontinued when out) Tumbler #2 alternate * P-14-162 and glove box tumblers - A-14-108 Combination keying kit containing this and other series (disc. when out) A-16-100 P-14-201/203 series P-16-151/154 series British Cars (MG, Triumph, and others), Volvo using keys such as S71B, 62DP, 62DR, & others (code Datsun / Nissan, Subaru - using 6-cut keys Tumbler #3 alternate * P-14-163 series FS, FP, FR, and others) (X6-X7-62DT-62DU type keys) Tumbler #1 P-14-201 Tumbler #2 P-14-202 Tumbler #1 P-16-151 Tumbler #3 P-14-203 Tumbler #4 alternate * P-14-164 Springs P-14-200 Combination keying kit containing this series and P-14-211/213 series A-14-111 Tumbler #2 P-16-152 Springs P-31-100 Combination keying kit previously available containing this and other series - A-14-230 * These tumblers are discontinued when out. -

Feasibility and Economic Aspects of Vactrains
Feasibility and Economic Aspects of Vactrains An Interactive Qualifying Project Submitted to the faculty Of the Worcester Polytechnic Institute Worcester, Massachusetts, USA In partial fulfilment of the requirements for the Degree of Bachelor of Science On this day of October11 , 2007 By Alihusain Yusuf Sirohiwala Electrical and Computer Engineering ‘09 Ananya Tandon Biomedical Engineering ‘08 Raj Vysetty Electrical and Computer Engineering ‘08 Project Advisor: Professor Oleg Pavlov, SSPS Abstract Vacuum Train refers to a proposed means of high speed long-haul transportation involving the use of Magnetic Levitation Trains in an evacuated tunnel. Our project was aimed at investigating the idea in more detail and quantifying some of the challenges involved. Although, several studies on similar ideas exist, a consolidated report documenting all past research and approaches involved is missing. Our report was an attempt to fill some of the gaps in these key research areas. 2 Acknowledgements There are many people without whose contribution this project would have been impossible. Firstly we would like to thank Professor Pavlov for his constant guidance and support in steering this IQP in the right direction. Next, we would like to thank Mr. Frank Davidson and Ms. Kathleen Lusk Brooke for expressing interest in our project and offering their suggestions and expertise in the field of macro-engineering towards our project. 3 Table of Contents 1 Introduction .............................................................................................................