Tilting Trains
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

High Speed Rail and Sustainability High Speed Rail & Sustainability
High Speed Rail and Sustainability High Speed Rail & Sustainability Report Paris, November 2011 2 High Speed Rail and Sustainability Author Aurélie Jehanno Co-authors Derek Palmer Ceri James This report has been produced by Systra with TRL and with the support of the Deutsche Bahn Environment Centre, for UIC, High Speed and Sustainable Development Departments. Project team: Aurélie Jehanno Derek Palmer Cen James Michel Leboeuf Iñaki Barrón Jean-Pierre Pradayrol Henning Schwarz Margrethe Sagevik Naoto Yanase Begoña Cabo 3 Table of contnts FOREWORD 1 MANAGEMENT SUMMARY 6 2 INTRODUCTION 7 3 HIGH SPEED RAIL – AT A GLANCE 9 4 HIGH SPEED RAIL IS A SUSTAINABLE MODE OF TRANSPORT 13 4.1 HSR has a lower impact on climate and environment than all other compatible transport modes 13 4.1.1 Energy consumption and GHG emissions 13 4.1.2 Air pollution 21 4.1.3 Noise and Vibration 22 4.1.4 Resource efficiency (material use) 27 4.1.5 Biodiversity 28 4.1.6 Visual insertion 29 4.1.7 Land use 30 4.2 HSR is the safest transport mode 31 4.3 HSR relieves roads and reduces congestion 32 5 HIGH SPEED RAIL IS AN ATTRACTIVE TRANSPORT MODE 38 5.1 HSR increases quality and productive time 38 5.2 HSR provides reliable and comfort mobility 39 5.3 HSR improves access to mobility 43 6 HIGH SPEED RAIL CONTRIBUTES TO SUSTAINABLE ECONOMIC DEVELOPMENT 47 6.1 HSR provides macro economic advantages despite its high investment costs 47 6.2 Rail and HSR has lower external costs than competitive modes 49 6.3 HSR contributes to local development 52 6.4 HSR provides green jobs 57 -
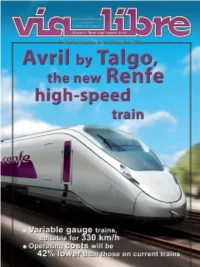
Avril by Talgo. the New Renfe High-Speed Train
Report - New high-speed train Avril by Talgo: Renfe’s new high-speed, variable gauge train On 28 November the Minister of Pub- Renfe Viajeros has awarded Talgo the tender for the sup- lic Works, Íñigo de la Serna, officially -an ply and maintenance over 30 years of fifteen high-speed trains at a cost of €22.5 million for each composition and nounced the award of a tender for the Ra maintenance cost of €2.49 per kilometre travelled. supply of fifteen new high-speed trains to This involves a total amount of €786.47 million, which represents a 28% reduction on the tender price Patentes Talgo for an overall price, includ- and includes entire lifecycle, with secondary mainte- nance activities being reserved for Renfe Integria work- ing maintenance for thirty years, of €786.5 shops. The trains will make it possible to cope with grow- million. ing demand for high-speed services, which has increased by 60% since 2013, as well as the new lines currently under construction that will expand the network in the coming and Asfa Digital signalling systems, with ten of them years and also the process of Passenger service liberaliza- having the French TVM signalling system. The trains will tion that will entail new demands for operators from 2020. be able to run at a maximum speed of 330 km/h. The new Avril (expected to be classified as Renfe The trains Class 106 or Renfe Class 122) will be interoperable, light- weight units - the lightest on the market with 30% less The new Avril trains will be twelve car units, three mass than a standard train - and 25% more energy-effi- of them being business class, eight tourist class cars and cient than the previous high-speed series. -

21NET:Broadband to Trains
Broadband to Trains AGENDA •Original ARTES project (2004-2006) in which we demonstrated first implementation of high speed internet over satellite on a high speed train (Renfe), and then a commercial trial (Thalys); •followed by a review of the developments we have undertaken since then focusing on our implementation on the Italian second railway operator NTV; •and lastly a summary of the challenges ahead to improve performance (VPNs, improved modems), bandwidth and antennas ARTES Workshop 1 Rome April 2013 Original ARTES Broadband to Trains Project Event Date Month Original Plan Kick Off 9 Feb 2004 0 0 BDR 31 Mar 2004 2 1 PSV 4 Nov 2004 9 6 SDA 18 Apr 2005 14 7 FR 6 Feb 2006 24 15 Broadband To Trains ESA Final Review 2 6 February 2006 Technical Trials in Spain - 2004 High Speed Internet for High Speed Trains 21Net + Renfe AVE PilotBroadband Trials To Trains ESA Final- June Review 3 6 February 2006 2004 Renfe Control Coach Broadband To Trains ESA Final Review 4 6 February 2006 Broadband To Trains ESA Final Review 5 6 February 2006 25,000 Volt Cable! Broadband To Trains ESA Final Review 6 6 February 2006 World Firsts We believe that 21Net / Renfe’s pilot trials represent: World’s first demonstration of high speed internet access from a high speed train World’s first demonstration of bi-directional Ku band satellite communication to and from a train Receive Data Rate: 4 mbps Transmit Date Rate: 2 mbps Broadband To Trains ESA Final Review 7 6 February 2006 Commercial Pilot on Thalys - 2005 High Speed Internet for High Speed Trains 21Net + Thalys CommercialBroadband To Trains ESA Service Final Review 8 - 6 February 2006 April - Dec 2005 "Everyone is eager to begin accessing the Internet onboard trains. -

Intercity Bus Feeder Project Program Analysis
Intercity Bus U.S. Department of Transportation Feeder Project Program Analysis September 1990 Intercity Bus Feeder Project Program Analysis Final Report September 1990 Prepared by Frederic D. Fravel, Elisabeth R. Hayes, and Kenneth I. Hosen Ecosometrics, Inc. 4715 Cordell Avenue Bethesda, Maryland 20814-3016 Prepared for Community Transportation Association of America 725 15th Street NW, Suite 900 Washington, D.C. 20005 Funded by Urban Mass Transportation Administration U.S. Department of Transportation 400 Seventh Street SW Washington, D.C. 20590 Distributed in Cooperation with Technology Sharing Program Research and Special Programs Administration U.S. Department of Transportation Washington, D.C. 20590 DOT-T-91-03 TABLE OF CONTENTS EXECUTIVE s uh4h4ARY . S-l Background and Purpose ............................................. S-l CurrentStatusoftheProgram ......................................... S-3 Identification of Participant Goals ....................................... S-3 Analysis of Participants .............................................. S-8 casestudies ...................................................... s-11 Program Costs and Benefits ........................................... S-l 1 Conclusions ...................................................... S-13 Goals and Objectives for the Rural Connection ............................. S-15 Identification of Potential Future Changes ................................. S-17 1 -- INTRODUCTION AND STATEMENT OFTHE PROBLEM . 1 BackgroundandPurpose............................................. -

Development of Next-Generation Tilting Train by Hybrid Tilt System A
Development of Next-generation Tilting Train by Hybrid Tilt System A.Shikimura1, T. Inaba1, H.Kakinuma1, I.Sato1, Y.Sato1, K.Sasaki2, M.Hirayama3 1Hokkaido Railway Company, Sapporo, Japan; 2Railway Technical Research Institute, Kokubunji, Japan; 3Kawasaki Heavy Industries, Ltd., Kobe, Japan [Abstract] To shorten train arrival time in existing railway lines (with a gauge of 1067mm), JR Hokkaido has improved running speed and acceleration and deceleration performance by solving Hokkaido’s regional problems of heavy snowfall and extremely severe cold and developed the capability to run on a curve section by our specific tilt-controlled vehicle system. Furthermore, to improve curving performance, this operating company developed “hybrid tilt system,” which can achieve a car body tilt angle of 8 degrees, by introducing the conventional “tilt system (curve guide type, tilt angle of 6 degrees)” and an “air spring car body tilt system (tilt angle of 2 degrees)” combined in cooperative control. This system is characterized by the reduction in tilt angel to 6 degrees on a curve in the conventional tilt-controlled system and another tilt angle of 2 degrees in a new tilting mechanism comprising the air spring on the outer rail side, thereby reducing the centrifugal force on a passenger. Meanwhile, since the motion of the center of gravity toward the outer rail side can be reduced by 25%, passenger’s riding comfort can be improved, which cannot be achieved in a single natural tilting vehicle with the same tilt angle. This paper outlines “hybrid tilt system” in this development project and provides cooperative control method for the 2 systems and the results of a stationary test. -

High-Speed Ground Transportation Noise and Vibration Impact Assessment
High-Speed Ground Transportation U.S. Department of Noise and Vibration Impact Assessment Transportation Federal Railroad Administration Office of Railroad Policy and Development Washington, DC 20590 Final Report DOT/FRA/ORD-12/15 September 2012 NOTICE This document is disseminated under the sponsorship of the Department of Transportation in the interest of information exchange. The United States Government assumes no liability for its contents or use thereof. Any opinions, findings and conclusions, or recommendations expressed in this material do not necessarily reflect the views or policies of the United States Government, nor does mention of trade names, commercial products, or organizations imply endorsement by the United States Government. The United States Government assumes no liability for the content or use of the material contained in this document. NOTICE The United States Government does not endorse products or manufacturers. Trade or manufacturers’ names appear herein solely because they are considered essential to the objective of this report. REPORT DOCUMENTATION PAGE Form Approved OMB No. 0704-0188 Public reporting burden for this collection of information is estimated to average 1 hour per response, including the time for reviewing instructions, searching existing data sources, gathering and maintaining the data needed, and completing and reviewing the collection of information. Send comments regarding this burden estimate or any other aspect of this collection of information, including suggestions for reducing this burden, to Washington Headquarters Services, Directorate for Information Operations and Reports, 1215 Jefferson Davis Highway, Suite 1204, Arlington, VA 22202-4302, and to the Office of Management and Budget, Paperwork Reduction Project (0704-0188), Washington, DC 20503. -

How Does High-Speed Rail Affect Tourism? a Case Study of the Capital Region of China
sustainability Article How Does High-Speed Rail Affect Tourism? A Case Study of the Capital Region of China Ping Yin 1,* , Francesca Pagliara 2 and Alan Wilson 3,4 1 Department of Tourism Management, School of Economics and Management, Beijing Jiaotong University, Beijing 100044, China 2 Department of Civil, Architectural and Environmental Engineering, University of Naples Federico II, 80125 Naples, Italy; [email protected] 3 Special Projects, The Alan Turing Institute, London NW1 2DB, UK; [email protected] 4 The Ada Lovelace Institute, Nuffield Foundation, London WC1B 3JS, UK * Correspondence: [email protected]; Tel.: +86-10-516-84068 Received: 17 December 2018; Accepted: 10 January 2019; Published: 17 January 2019 Abstract: The objective of this study is to analyze the tourism spatial interaction that defines two scenarios, i.e., the actual one with the current high-speed rail (HSR) network, and the future one with an extension of the HSR network, considering as a case study the Capital region of China. The impact of HSR on the spatial distribution characteristics is investigated. The main outcome of this study is that the extension of the HSR network in the future scenario will significantly increase the total tourism spatial interaction and will reduce the spatial difference. What this paper adds to the current knowledge about HSR and tourism is that smaller cities, such as Tangshan, Zhangjiakou, and Chengde, connected via HSR to core cities will benefit the most from the HSR network’s operation. Those cities should take the HSR network as a development opportunity to enhance their attractiveness and strengthen their marketing to achieve sustainable tourism competitiveness. -

Part 2: Speeding-Up Conventional Lines and Shinkansen Asahi Mochizuki
Breakthrough in Japanese Railways 9 JRTR Speed-up Story 2 Part 2: Speeding-up Conventional Lines and Shinkansen Asahi Mochizuki Reducing Journey Times on is limited by factors such as curves, grades, and turnouts, so Conventional Lines scheduled speed can only be increased by focusing effort on increasing speed at these locations. Distribution of factors limiting speed Many of the intercity railways in Japan are lines in The maximum speed of any line is determined by emergency mountainous areas. So, objectives for increasing speeds braking distance. However, train speeds are also restricted by cannot be achieved by simply raising the maximum speed. various other factors, such as curves, grades, and turnouts. Acceleration and deceleration performance also impact Speed-up on curves journey time. The impact of each element depends on the The basic measures for increasing speeds on curves are terrain of the line. The following graphs show the distributions lowering the centre of gravity of rolling stock and canting the of these elements for the Joban Line, crossing relatively flat track. However, these measures have already been applied land, and for the eastern section of the Chuo Line, running fully; cant cannot be increased on lines serving slow freight through mountains. trains with a high centre of gravity. Conversely, increasing The graph for the Joban Line crossing the flat Kanto passenger train speed through curves to just below the limit Plain shows that it runs at the maximum speed of 120 km/h where the trains could overturn causes reduced ride comfort (M part) for about half the journey time. -

Feasibility and Economic Aspects of Vactrains
Feasibility and Economic Aspects of Vactrains An Interactive Qualifying Project Submitted to the faculty Of the Worcester Polytechnic Institute Worcester, Massachusetts, USA In partial fulfilment of the requirements for the Degree of Bachelor of Science On this day of October11 , 2007 By Alihusain Yusuf Sirohiwala Electrical and Computer Engineering ‘09 Ananya Tandon Biomedical Engineering ‘08 Raj Vysetty Electrical and Computer Engineering ‘08 Project Advisor: Professor Oleg Pavlov, SSPS Abstract Vacuum Train refers to a proposed means of high speed long-haul transportation involving the use of Magnetic Levitation Trains in an evacuated tunnel. Our project was aimed at investigating the idea in more detail and quantifying some of the challenges involved. Although, several studies on similar ideas exist, a consolidated report documenting all past research and approaches involved is missing. Our report was an attempt to fill some of the gaps in these key research areas. 2 Acknowledgements There are many people without whose contribution this project would have been impossible. Firstly we would like to thank Professor Pavlov for his constant guidance and support in steering this IQP in the right direction. Next, we would like to thank Mr. Frank Davidson and Ms. Kathleen Lusk Brooke for expressing interest in our project and offering their suggestions and expertise in the field of macro-engineering towards our project. 3 Table of Contents 1 Introduction ............................................................................................................. -
THE WORLD of LAPP Solutions for Railway Technology 2018|2019 Legend for Icons
THE WORLD OF LAPP Solutions for railway technology 2018|2019 Legend for icons Product characteristics Suitable for outdoor use Mechanical resistance Voltage Good chemical Assembly time Interference signals resistance Flame-retardant Low weight Temperature-resistant Wide clamping range Oil-resistant UV-resistant Halogen-free Space requirement Waterproof Variety of approval Heat-resistant Robust certifications Cold-resistant Acid-resistant Corrosion-resistant Reliability Please note: the purpose of the icons is to provide you with a quick overview and a rough indication of the product features to which the corresponding information relates. You can find details of product characteristics in the “technical data” sections on the product pages. content � � � � � � � � � � Company information � � � � � � � � � � � � � � � � � � � � � � 2 ÖLFLEX® � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � Power and control cables �� � � � � � � � � � � � � � � � � 22 UNITRONIC® � � � � � � � � � � Data communication systems � � � � � � � � � � � � 47 ETHERLINE® Data communication systems � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � for ETHERNET technology � � � � � � � � � � � � � � � � � 48 EPIC® � � � � � � � � � � Industrial connectors �� � � � � � � � � � � � � � � � � � � � � � 49 SKINTOP® � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � Cable glands �� � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � 71 SILVYN® Protective cable conduit � � � � � � � � � � systems and cable carrier systems �� -

Analysis of Ground Motion Due to Moving Surface Loads Induced by High-Speed Trains
Analysis of ground motion due to moving surface loads induced by high-speed trains ∗ P. Galv´ın,J. Dom´ınguez Escuela Superior de Ingenieros, Universidad de Sevilla, Camino de los Descubrimientos s/n, 41092 Sevilla, Spain Abstract A three dimensional time domain boundary element approach for the analysis of soil vibrations induced by high-speed moving loads is presented in this paper. An attenuation law is included in the formulation. By doing so, internal material dam- ping can be taken into account. The characteristics of the BE model required for the study of travelling load problems are analyzed. Thus, mesh size, type of ele- ments, internal damping representation, and the complete numerical approach are validated. Existing analytical solutions for some simple problems are used as a re- ference. Experimental results measured in a simple soil dynamic load problem are also accurately reproduced by the proposed model. The analysis of the type of BE mesh required for a good representation of high-speed train effects is carried out using different discretizations under the sleepers and the free field near the track. All these analyses allow to define a model very well suited for the study of soil vibration effects due to high-speed train passage. Vibrations produced by an Alstom (Thalys- AVE) train travelling at 256 km/h and 300 km/h speed are evaluated at different locations near the track. Results show that the proposed numerical procedure and attenuation law allow for a realistic representation of the effects of the different passing loads. The BE approach presented in this paper can be used for actual analyses of high-speed trains induced vibrations. -

TGV Communicant Research Program": from Research to Industrialisation of Onboard Broadband Internet Services for High-Speed Trains
"TGV Communicant Research Program": from research to industrialisation of onboard broadband Internet services for high-speed trains D. Sanz1, P. Pasquet1, P. Mercier1, B. Villeforceix2, D. Duchange2 1 SNCF, Paris, France; 2 Orange Lab, Issy Les Moulineaux, France Abstract This paper presents the work carried out by SNCF between 2005 and 2007 in order to validate two different and complementary technologies for the implementation of train-ground broadband communications able to deliver onboard Internet services to high speed trains passengers: satellite technologies and WiFi. Firstly, the previous SNCF work in that domain is introduced. Secondly, the experimented satellite technologies are presented, as well as their advantages and drawbacks. Then, the WiFi trials carried out with Orange Lab are presented in detail. Finally, the “Connexion TGV” Project, one of the first industrialization of this kind of systems in the World, is introduced. Introduction Within the last years, SNCF has carried out some research projects in the domain of train- ground broadband communications within the framework of its "TGV Communicant Research Program" (TGV is the acronym for “Train a Grande Vitesse”, the French high speed trains, which operation speed is 300 km/h, 320 km/h in the case of TGV Est European high speed line going from Paris to Strasbourg). The objective of this program is to find solutions in order to deliver Internet connectivity services to passengers, but also to connect the crew and the train itself (machine-to-machine applications). Some of the results of the program were already presented at WCRR 2006 in Montréal in [1]. This introduction aims to remember this previous work.