Single-Threaded Polyhedra Models
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Build a Tetrahedral Kite
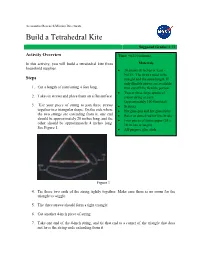
Aeronautics Research Mission Directorate Build a Tetrahedral Kite Suggested Grades: 8-12 Activity Overview Time: 90-120 minutes In this activity, you will build a tetrahedral kite from Materials household supplies. • 24 straws (8 inches or less) - NOTE: The straws need to be Steps straight and the same length. If only flexible straws are available, 1. Cut a length of yarn/string 4 feet long. then cut off the flexible portion. • Two or three large spools of 2. Take six straws and place them on a flat surface. cotton string or yarn (approximately 100 feet total) 3. Use your piece of string to join three straws • Scissors together in a triangular shape. On the side where • Hot glue gun and hot glue sticks the two strings are extending from it, one end • Ruler or dowel rod for kite bridle should be approximately 20 inches long, and the • Four pieces of tissue paper (24 x other should be approximately 4 inches long. 18 inches or larger) See Figure 1. • All-purpose glue stick Figure 1 4. Tie these two ends of the string tightly together. Make sure there is no room for the triangle to wiggle. 5. The three straws should form a tight triangle. 6. Cut another 4-inch piece of string. 7. Take one end of the 4-inch string, and tie that end to a corner of the triangle that does not have the string ends extending from it. Figure 2. 8. Add two more straws onto the longest piece of string. 9. Next, take the string that holds the two additional straws and tie it to the end of one of the 4-inch strings to make another tight triangle. -

Phase Behavior of a Family of Truncated Hard Cubes Anjan P
THE JOURNAL OF CHEMICAL PHYSICS 142, 054904 (2015) Phase behavior of a family of truncated hard cubes Anjan P. Gantapara,1,a) Joost de Graaf,2 René van Roij,3 and Marjolein Dijkstra1,b) 1Soft Condensed Matter, Debye Institute for Nanomaterials Science, Utrecht University, Princetonplein 5, 3584 CC Utrecht, The Netherlands 2Institute for Computational Physics, Universität Stuttgart, Allmandring 3, 70569 Stuttgart, Germany 3Institute for Theoretical Physics, Utrecht University, Leuvenlaan 4, 3584 CE Utrecht, The Netherlands (Received 8 December 2014; accepted 5 January 2015; published online 5 February 2015; corrected 9 February 2015) In continuation of our work in Gantapara et al., [Phys. Rev. Lett. 111, 015501 (2013)], we inves- tigate here the thermodynamic phase behavior of a family of truncated hard cubes, for which the shape evolves smoothly from a cube via a cuboctahedron to an octahedron. We used Monte Carlo simulations and free-energy calculations to establish the full phase diagram. This phase diagram exhibits a remarkable richness in crystal and mesophase structures, depending sensitively on the precise particle shape. In addition, we examined in detail the nature of the plastic crystal (rotator) phases that appear for intermediate densities and levels of truncation. Our results allow us to probe the relation between phase behavior and building-block shape and to further the understanding of rotator phases. Furthermore, the phase diagram presented here should prove instrumental for guiding future experimental studies on similarly shaped nanoparticles and the creation of new materials. C 2015 AIP Publishing LLC. [http://dx.doi.org/10.1063/1.4906753] I. INTRODUCTION pressures, i.e., at densities below close packing. -

THE GEOMETRY of PYRAMIDS One of the More Interesting Solid
THE GEOMETRY OF PYRAMIDS One of the more interesting solid structures which has fascinated individuals for thousands of years going all the way back to the ancient Egyptians is the pyramid. It is a structure in which one takes a closed curve in the x-y plane and connects straight lines between every point on this curve and a fixed point P above the centroid of the curve. Classical pyramids such as the structures at Giza have square bases and lateral sides close in form to equilateral triangles. When the closed curve becomes a circle one obtains a cone and this cone becomes a cylindrical rod when point P is moved to infinity. It is our purpose here to discuss the properties of all N sided pyramids including their volume and surface area using only elementary calculus and geometry. Our starting point will be the following sketch- The base represents a regular N sided polygon with side length ‘a’ . The angle between neighboring radial lines r (shown in red) connecting the polygon vertices with its centroid is θ=2π/N. From this it follows, by the law of cosines, that the length r=a/sqrt[2(1- cos(θ))] . The area of the iscosolis triangle of sides r-a-r is- a a 2 a 2 1 cos( ) A r 2 T 2 4 4 (1 cos( ) From this we have that the area of the N sided polygon and hence the pyramid base will be- 2 2 1 cos( ) Na A N base 2 4 1 cos( ) N 2 It readily follows from this result that a square base N=4 has area Abase=a and a hexagon 2 base N=6 yields Abase= 3sqrt(3)a /2. -

Smooth & Fractal Polyhedra Ergun Akleman, Paul Edmundson And
Smooth & Fractal Polyhedra Ergun Akleman, Paul Edmundson and Ozan Ozener Visualization Sciences Program, Department of Architecture, 216 Langford Center, College Station, Texas 77843-3137, USA. email: [email protected]. Abstract In this paper, we present a new class of semi-regular polyhedra. All the faces of these polyhedra are bounded by smooth (quadratic B-spline) curves and the face boundaries are C1 discontinues every- where. These semi-regular polyhedral shapes are limit surfaces of a simple vertex truncation subdivision scheme. We obtain an approximation of these smooth fractal polyhedra by iteratively applying a new vertex truncation scheme to an initial manifold mesh. Our vertex truncation scheme is based on Chaikin’s construction. If the initial manifold mesh is a polyhedra only with planar faces and 3-valence vertices, in each iteration we construct polyhedral meshes in which all faces are planar and every vertex is 3-valence, 1 Introduction One of the most exciting aspects of shape modeling and sculpting is the development of new algorithms and methods to create unusual, interesting and aesthetically pleasing shapes. Recent advances in computer graphics, shape modeling and mathematics help the imagination of contemporary mathematicians, artists and architects to design new and unusual 3D forms [11]. In this paper, we present such a unusual class of semi-regular polyhedra that are contradictorily interesting, i.e. they are smooth but yet C1 discontinuous. To create these shapes we apply a polyhedral truncation algorithm based on Chaikin’s scheme to any initial manifold mesh. Figure 1 shows two shapes that are created by using our approach. -

Archimedean Solids
University of Nebraska - Lincoln DigitalCommons@University of Nebraska - Lincoln MAT Exam Expository Papers Math in the Middle Institute Partnership 7-2008 Archimedean Solids Anna Anderson University of Nebraska-Lincoln Follow this and additional works at: https://digitalcommons.unl.edu/mathmidexppap Part of the Science and Mathematics Education Commons Anderson, Anna, "Archimedean Solids" (2008). MAT Exam Expository Papers. 4. https://digitalcommons.unl.edu/mathmidexppap/4 This Article is brought to you for free and open access by the Math in the Middle Institute Partnership at DigitalCommons@University of Nebraska - Lincoln. It has been accepted for inclusion in MAT Exam Expository Papers by an authorized administrator of DigitalCommons@University of Nebraska - Lincoln. Archimedean Solids Anna Anderson In partial fulfillment of the requirements for the Master of Arts in Teaching with a Specialization in the Teaching of Middle Level Mathematics in the Department of Mathematics. Jim Lewis, Advisor July 2008 2 Archimedean Solids A polygon is a simple, closed, planar figure with sides formed by joining line segments, where each line segment intersects exactly two others. If all of the sides have the same length and all of the angles are congruent, the polygon is called regular. The sum of the angles of a regular polygon with n sides, where n is 3 or more, is 180° x (n – 2) degrees. If a regular polygon were connected with other regular polygons in three dimensional space, a polyhedron could be created. In geometry, a polyhedron is a three- dimensional solid which consists of a collection of polygons joined at their edges. The word polyhedron is derived from the Greek word poly (many) and the Indo-European term hedron (seat). -

Math 366 Lecture Notes Section 11.4 – Geometry in Three Dimensions
Section 11-4 Math 366 Lecture Notes Section 11.4 – Geometry in Three Dimensions Simple Closed Surfaces A simple closed surface has exactly one interior, no holes, and is hollow. A sphere is the set of all points at a given distance from a given point, the center . A sphere is a simple closed surface. A solid is a simple closed surface with all interior points. (see p. 726) A polyhedron is a simple closed surface made up of polygonal regions, or faces . The vertices of the polygonal regions are the vertices of the polyhedron, and the sides of each polygonal region are the edges of the polyhedron. (see p. 726-727) A prism is a polyhedron in which two congruent faces lie in parallel planes and the other faces are bounded by parallelograms. The parallel faces of a prism are the bases of the prism. A prism is usually names after its bases. The faces other than the bases are the lateral faces of a prism. A right prism is one in which the lateral faces are all bounded by rectangles. An oblique prism is one in which some of the lateral faces are not bounded by rectangles. To draw a prism: 1) Draw one of the bases. 2) Draw vertical segments of equal length from each vertex. 3) Connect the bottom endpoints to form the second base. Use dashed segments for edges that cannot be seen. A pyramid is a polyhedron determined by a polygon and a point not in the plane of the polygon. The pyramid consists of the triangular regions determined by the point and each pair of consecutive vertices of the polygon and the polygonal region determined by the polygon. -

VOLUME of POLYHEDRA USING a TETRAHEDRON BREAKUP We
VOLUME OF POLYHEDRA USING A TETRAHEDRON BREAKUP We have shown in an earlier note that any two dimensional polygon of N sides may be broken up into N-2 triangles T by drawing N-3 lines L connecting every second vertex. Thus the irregular pentagon shown has N=5,T=3, and L=2- With this information, one is at once led to the question-“ How can the volume of any polyhedron in 3D be determined using a set of smaller 3D volume elements”. These smaller 3D eelements are likely to be tetrahedra . This leads one to the conjecture that – A polyhedron with more four faces can have its volume represented by the sum of a certain number of sub-tetrahedra. The volume of any tetrahedron is given by the scalar triple product |V1xV2∙V3|/6, where the three Vs are vector representations of the three edges of the tetrahedron emanating from the same vertex. Here is a picture of one of these tetrahedra- Note that the base area of such a tetrahedron is given by |V1xV2]/2. When this area is multiplied by 1/3 of the height related to the third vector one finds the volume of any tetrahedron given by- x1 y1 z1 (V1xV2 ) V3 Abs Vol = x y z 6 6 2 2 2 x3 y3 z3 , where x,y, and z are the vector components. The next question which arises is how many tetrahedra are required to completely fill a polyhedron? We can arrive at an answer by looking at several different examples. Starting with one of the simplest examples consider the double-tetrahedron shown- It is clear that the entire volume can be generated by two equal volume tetrahedra whose vertexes are placed at [0,0,sqrt(2/3)] and [0,0,-sqrt(2/3)]. -

The Mars Pentad Time Pyramids the Quantum Space Time Fractal Harmonic Codex the Pentagonal Pyramid
The Mars Pentad Time Pyramids The Quantum Space Time Fractal Harmonic Codex The Pentagonal Pyramid Abstract: Early in this author’s labors while attempting to create the original Mars Pentad Time Pyramids document and pyramid drawings, a failure was experienced trying to develop a pentagonal pyramid with some form of tetrahedral geometry. This pentagonal pyramid is now approached again and refined to this tetrahedral criteria, creating tetrahedral angles in the pentagonal pyramid, and pentagonal [54] degree angles in the pentagon base for the pyramid. In the process another fine pentagonal pyramid was developed with pure pentagonal geometries using the value for ancient Egyptian Pyramid Pi = [22 / 7] = [aPi]. Also used is standard modern Pi and modern Phi in one of the two pyramids shown. Introduction: Achieved are two Pentagonal Pyramids: One creates tetrahedral angle [54 .735~] in the Side Angle {not the Side Face Angle}, using a novel height of the value of tetrahedral angle [19 .47122061] / by [5], and then the reverse tetrahedral angle is accomplished with the same tetrahedral [19 .47122061] angle value as the height, but “Harmonic Codexed” to [1 .947122061]! This achievement of using the second height mentioned, proves aspects of the Quantum Space Time Fractal Harmonic Codex. Also used is Height = [2], which replicates the [36] and [54] degree angles in the pentagon base to the Side Angles of the Pentagonal Pyramid. I have come to understand that there is not a “perfect” pentagonal pyramid. No matter what mathematical constants or geometry values used, there will be a slight factor of error inherent in the designs trying to attain tetrahedra. -

Crystalline Assemblies and Densest Packings of a Family of Truncated Tetrahedra and the Role of Directional Entropic Forces
Crystalline Assemblies and Densest Packings of a Family of Truncated Tetrahedra and the Role of Directional Entropic Forces Pablo F. Damasceno1*, Michael Engel2*, Sharon C. Glotzer1,2,3† 1Applied Physics Program, 2Department of Chemical Engineering, and 3Department of Materials Science and Engineering, University of Michigan, Ann Arbor, Michigan 48109, USA. * These authors contributed equally. † Corresponding author: [email protected] Dec 1, 2011 arXiv: 1109.1323v2 ACS Nano DOI: 10.1021/nn204012y ABSTRACT Polyhedra and their arrangements have intrigued humankind since the ancient Greeks and are today important motifs in condensed matter, with application to many classes of liquids and solids. Yet, little is known about the thermodynamically stable phases of polyhedrally-shaped building blocks, such as faceted nanoparticles and colloids. Although hard particles are known to organize due to entropy alone, and some unusual phases are reported in the literature, the role of entropic forces in connection with polyhedral shape is not well understood. Here, we study thermodynamic self-assembly of a family of truncated tetrahedra and report several atomic crystal isostructures, including diamond, β-tin, and high- pressure lithium, as the polyhedron shape varies from tetrahedral to octahedral. We compare our findings with the densest packings of the truncated tetrahedron family obtained by numerical compression and report a new space filling polyhedron, which has been overlooked in previous searches. Interestingly, the self-assembled structures differ from the densest packings. We show that the self-assembled crystal structures can be understood as a tendency for polyhedra to maximize face-to-face alignment, which can be generalized as directional entropic forces. -

Arxiv:1705.01294V1
Branes and Polytopes Luca Romano email address: [email protected] ABSTRACT We investigate the hierarchies of half-supersymmetric branes in maximal supergravity theories. By studying the action of the Weyl group of the U-duality group of maximal supergravities we discover a set of universal algebraic rules describing the number of independent 1/2-BPS p-branes, rank by rank, in any dimension. We show that these relations describe the symmetries of certain families of uniform polytopes. This induces a correspondence between half-supersymmetric branes and vertices of opportune uniform polytopes. We show that half-supersymmetric 0-, 1- and 2-branes are in correspondence with the vertices of the k21, 2k1 and 1k2 families of uniform polytopes, respectively, while 3-branes correspond to the vertices of the rectified version of the 2k1 family. For 4-branes and higher rank solutions we find a general behavior. The interpretation of half- supersymmetric solutions as vertices of uniform polytopes reveals some intriguing aspects. One of the most relevant is a triality relation between 0-, 1- and 2-branes. arXiv:1705.01294v1 [hep-th] 3 May 2017 Contents Introduction 2 1 Coxeter Group and Weyl Group 3 1.1 WeylGroup........................................ 6 2 Branes in E11 7 3 Algebraic Structures Behind Half-Supersymmetric Branes 12 4 Branes ad Polytopes 15 Conclusions 27 A Polytopes 30 B Petrie Polygons 30 1 Introduction Since their discovery branes gained a prominent role in the analysis of M-theories and du- alities [1]. One of the most important class of branes consists in Dirichlet branes, or D-branes. D-branes appear in string theory as boundary terms for open strings with mixed Dirichlet-Neumann boundary conditions and, due to their tension, scaling with a negative power of the string cou- pling constant, they are non-perturbative objects [2]. -

The Crystal Forms of Diamond and Their Significance
THE CRYSTAL FORMS OF DIAMOND AND THEIR SIGNIFICANCE BY SIR C. V. RAMAN AND S. RAMASESHAN (From the Department of Physics, Indian Institute of Science, Bangalore) Received for publication, June 4, 1946 CONTENTS 1. Introductory Statement. 2. General Descriptive Characters. 3~ Some Theoretical Considerations. 4. Geometric Preliminaries. 5. The Configuration of the Edges. 6. The Crystal Symmetry of Diamond. 7. Classification of the Crystal Forros. 8. The Haidinger Diamond. 9. The Triangular Twins. 10. Some Descriptive Notes. 11. The Allo- tropic Modifications of Diamond. 12. Summary. References. Plates. 1. ~NTRODUCTORY STATEMENT THE" crystallography of diamond presents problems of peculiar interest and difficulty. The material as found is usually in the form of complete crystals bounded on all sides by their natural faces, but strangely enough, these faces generally exhibit a marked curvature. The diamonds found in the State of Panna in Central India, for example, are invariably of this kind. Other diamondsJas for example a group of specimens recently acquired for our studies ffom Hyderabad (Deccan)--show both plane and curved faces in combination. Even those diamonds which at first sight seem to resemble the standard forms of geometric crystallography, such as the rhombic dodeca- hedron or the octahedron, are found on scrutiny to exhibit features which preclude such an identification. This is the case, for example, witb. the South African diamonds presented to us for the purpose of these studŸ by the De Beers Mining Corporation of Kimberley. From these facts it is evident that the crystallography of diamond stands in a class by itself apart from that of other substances and needs to be approached from a distinctive stand- point. -

Uniform Panoploid Tetracombs
Uniform Panoploid Tetracombs George Olshevsky TETRACOMB is a four-dimensional tessellation. In any tessellation, the honeycells, which are the n-dimensional polytopes that tessellate the space, Amust by definition adjoin precisely along their facets, that is, their ( n!1)- dimensional elements, so that each facet belongs to exactly two honeycells. In the case of tetracombs, the honeycells are four-dimensional polytopes, or polychora, and their facets are polyhedra. For a tessellation to be uniform, the honeycells must all be uniform polytopes, and the vertices must be transitive on the symmetry group of the tessellation. Loosely speaking, therefore, the vertices must be “surrounded all alike” by the honeycells that meet there. If a tessellation is such that every point of its space not on a boundary between honeycells lies in the interior of exactly one honeycell, then it is panoploid. If one or more points of the space not on a boundary between honeycells lie inside more than one honeycell, the tessellation is polyploid. Tessellations may also be constructed that have “holes,” that is, regions that lie inside none of the honeycells; such tessellations are called holeycombs. It is possible for a polyploid tessellation to also be a holeycomb, but not for a panoploid tessellation, which must fill the entire space exactly once. Polyploid tessellations are also called starcombs or star-tessellations. Holeycombs usually arise when (n!1)-dimensional tessellations are themselves permitted to be honeycells; these take up the otherwise free facets that bound the “holes,” so that all the facets continue to belong to two honeycells. In this essay, as per its title, we are concerned with just the uniform panoploid tetracombs.