Aerospace Propulsion from Insects to Spaceflight
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Technical Supplements
Technical Supplements S1 The IG JAS Investment In this Technical Supplement the JAS 39 Gripen product concept is outlined, the procurement process documented, the Industry Group IG JAS presented and the critical role of the competent public procurement agency, the FMV, highlighted. S1.1 The Procurement of the JAS 39 Gripen Aircraft with Swing-Role Capabilities The JAS 39 Gripen multirole combat aircraft (J stands for fighter, A for Attack and S for Surveillance/reconnaissance) is a fourth generation aircraft that entered operational service in 1997. It replaced the Viggen, the last of which was taken out of service in 2006. JAS 39 Gripen is a combat aircraft with swing-role capabilities that can change mission in flight. This swing-role capability was unique when Gripen was launched but has later been introduced on the French Rafale and the Eurofighter. Other competing multirole aircraft first have to land to reconfigure its information, guidance, and weapons systems for a new role. Gripen was the first “unstable” aircraft in the world which meant that in order for the aircraft to be stable at all speeds and in all maneuvers many more navigation surfaces are needed than the pilot can possibly control himself to minimize air friction at each moment. He needs incredibly sophisticated computer systems support to maneuver the aircraft effectively and safely. Competing fourth generation combat aircraft are F-35/JSF (the USA, not yet (2009) delivered to market), the Eurofighter Typhoon (the UK, etc.) and Rafale (Dassault, France). JAS 39 Gripen also competes with upgraded versions of the third generation aircraft of Lockheed Martin F-16 (the USA, first delivered in 1978), Boeing F/A18 Hornet (the USA, first delivered in 1983), Dassault Mirage 2000 (France, first delivered in 1983), and Mig-29 (the former Soviet Union, first delivered in 1977). -

"Вертолеты России" № 2(28) 2016 01.08.2016
№ 2 (28) / 2016 СПРОС НА РОССИЙСКИЕ ВЕРТОЛЕТЫ О С ТА Е ТС Я В Ы СО К И М THE DEMAND FOR RUSSIAN HELICOPTERS REMAINS HIGH ПОКОРИТЕЛИ МОРЯ: ВЕРТОЛЕТЫ ДЛЯ ВОЕННОМОРСКОГО ФЛОТА ЛЮБОЙ АНГОЛЕЦ ВАМ СКАЖЕТ: «Я ЗНАЮ МИ8» CONQUERORS OF THE SEA: MARINE HELICOPTERS ANY ANGOLAN WILL TELL YOU: “I KNOW MI8” RHmag_Cov_2016-3.indd 1 22/08/16 14:56 № 2 (28) / 2016 15 23 47 ОБРАЩЕНИЕ К ЧИТАТЕЛЯМ | APPEAL TO READERS МЕЖДУНАРОДНЫЕ РЫНКИ | INTERNATIONAL MARKETS Обращение генерального директора А. А. Михеева . .2 «Вертолеты России» на KADEX-2016: Message from CEO Alexander Mikheev демонстрация возможностей . .15 Russian Helicopters at KADEX 2016: demonstration of capabilities НОВОСТИ ХОЛДИНГА | HOLDING NEWS «Вертолеты России» примут участие в военно- Российские вертолеты в тропической Африке . .18 техническом форуме «Армия-2016» . .4 Russian helicopters in Sub-Saharan Africa Russian Helicopters to participate in the Military-Technical Forum Army-2016 СТРАТЕГИЯ | STRATEGY Делегация Мьянмы оценила перспективы Покорители моря вертолеты сотрудничества с «Вертолетами России» . .5 для Военно-морского флота . .23 A delegation from Myanmar evaluates cooperation prospects with Russian Conquerors of the Sea Marine Helicopters Helicopters ТЕХНОЛОГИИ | TECHNOLOGIES Холдинг «Вертолеты России» поставил в Китай Александр Охонько, гендиректор «ВР-Технологии»: четвертый Ми-26ТС . .6 «Рынок беспилотников в России Russian Helicopters supplies fourth Mi-26TS helicopter to China активно формируется» . .29 Alexander Okhonko: the CEO of VR-Technologies: «Вертолеты России» передали Министерству “The drone market in Russia is actively developing” обороны РФ первую партию новых Ми-8АМТШ . .7 Russian Helicopters supplies the first batch of new Mi-8AMTSh to the Russian СОТРУДНИЧЕСТВО | COOPERATION Ministry of Defense Вертолетные двигатели: сделано в России . -

Avions Civils
SOMMAIRE DU VOLUME I LA CONDUITE DES PROGRAMMES CIVILS AVANT-PROPOS ET REMERCIEMENTS........................................................................... 3 PREFACE.............................................................................................................................. 5 PRESENTATION GENERALE ............................................................................................. 9 CHAPITRE 1 PRESENTATION DE L’ACTIVITE...................................................................................... 11 LE MARCHE DU TRANSPORT AERIEN .................................................................................. 11 Le passager et l’évolution du trafic.......................................................................................... 11 Les compagnies et la flotte d’avions ....................................................................................... 13 LA CONSTRUCTION DES AVIONS CIVILS .............................................................................. 14 Les caractéristiques de l’activité.............................................................................................. 14 La compétition et son évolution............................................................................................... 18 La dimension économique et monétaire ................................................................................. 20 L’ ADMINISTRATION ET SES MISSIONS ................................................................................. 22 La tutelle militaire de -

L'arsenal De L'aéronautique
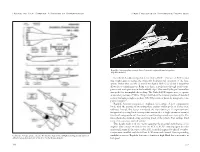
L’impressionnant bimoteur prototype VG 10-02 en cours de montage durant l’hiver 1944-1945. L’Arsenal de l’aéronautique Ce devait être une société laboratoire, un modèle. Ce ne fut qu’un constructeur de plus, mais ses ingénieurs avec l’assistance des Centre d’essais mirent au point toutes les techniques modernes. 1 Capable d’enterrer les meilleures idées et les projets les plus utiles, le corbillard de la mort est un vé- hicule commandé par trois forts leviers : la bêtise, la mollesse et la fainéantise. On repère le premier à son inscription : « je ne sais pas », le second porte la mention : « je ne veux pas », le troisième : « ce n’est pas à moi de la faire ». Gérard Hartmann, 33 ans d’expérience professionnelle. 2 Une société modèle Dans les années trente, les députés (qui votent les budgets) et les dirigeants militaires français réalisent que par suite de manque de concentration et de partage des compétences, l’industrie aéronautique nationale a pris du re- tard par rapport aux grandes nations étrangè- res, Allemagne, Italie, Russie, Etats-Unis, Grande-Bretagne. C’est pourquoi ils décident de doter la France des structures adéquates. Avant même l’arrivée au pouvoir du Front po- pulaire, le rapporteur du budget de l’Air, le député socialiste Pierre Renaudel (1871-1935) défend l’idée d’une « société d’étude et de construction aéronautique modèle » (d’Etat). Ce sera L’Arsenal de l’aéronautique. La Grande soufflerie de Chalais-Meudon, inaugurée en 1934. Le Centre d’Essais des Moteurs et des Hélices de l’aviation militaire française passe sous le contrôle du ministère de l’Air. -

A Supersonic Fan Equipped Variable Cycle Engine for a Mach 2.7 Supersonic Transport
University of New Hampshire University of New Hampshire Scholars' Repository Applied Engineering and Sciences Scholarship Applied Engineering and Sciences 8-22-1985 A Supersonic Fan Equipped Variable Cycle Engine for a Mach 2.7 Supersonic Transport Theodore S. Tavares University of New Hampshire, Manchester, [email protected] Follow this and additional works at: https://scholars.unh.edu/unhmcis_facpub Recommended Citation Tavares, T.S., “A Supersonic Fan Equipped Variable Cycle Engine for a Mach 2.7 Supersonic Transport,” NASA-CR-177141, 1986. This Report is brought to you for free and open access by the Applied Engineering and Sciences at University of New Hampshire Scholars' Repository. It has been accepted for inclusion in Applied Engineering and Sciences Scholarship by an authorized administrator of University of New Hampshire Scholars' Repository. For more information, please contact [email protected]. https://ntrs.nasa.gov/search.jsp?R=19860019474 2018-07-25T19:53:49+00:00Z ^4/>*>?/ GAS TURBINE LABORATORY DEPARTMENT OF AERONAUTICS AND ASTRONAUTICS MASSACHUSETTS INSTITUTE OF TECHNOLOGY CAMBRIDGE, MA 02139 A FINAL REPORT ON NASA GRANT NAG-3-697 entitled A SUPERSONIC FAN EQUIPPED VARIABLE CYCLE ENGINE FOR A MACH 2.7 SUPERSONIC TRANSPORT by T. S. Tavares prepared for NASA Lewis Research Center Cleveland, OH 44135 (NASA-CB-177141) A SDPEBSCNIC FAN EQUIPPED N86-28946 VARIABLE CYCLE ENGINE.JOB A MACH 2.? SDPEESONIC TBANSPOBT Final Report (Massachusetts Inst. of Tech.) 107 p Unclas CSCL 21E G3/07 43461 August 22, 1985 A SUPERSONIC FAN EQUIPPED VARIABLE CYCLE ENGINE FOR A HACK 2.7 SUPERSONIC TRANSPORT by Theodore Sean Tavares A SUPERSONIC FAN EQUIPPED VARIABLE CYCLE ENGINE FOR A MACH 2.7 SUPERSONIC TRANSPORT by THEODORE SEAN TAVARES ABSTRACT A design stud/ was carried out to evaluate the concept of a variable cycle turbofan engine with an axially supersonic fan stage as powerplant for a Mach 2.7 supersonic transport. -

Global Economy
INNOVATIONS IN MATERIALS TECHNOLOGY GLOBAL ECONOMY Stainless steel saves weight, reduces emissions in autos BRIEFS Stainless steel in automotive construction can save weight and thus conserve resources without Alcan has inaugurated a compromising safety standards, according to the “Next Generation Vehicle” project, an alliance of technologically advanced leading stainless steel producers and automotive OEMs. horizontal furnace at its The project was launched at the end of 2004 with the aim of identifying potential for stainless Sierre facility in Switzerland. Its power steel in auto structures. The automotive OEMs participating in the project were Audi, BMW, Chrysler, consumption is four times Fiat, General Motors/Saab, and Ford/Volvo. The stainless steel producers involved were Thyssen lower than older furnaces, Krupp Nirosta (Germany), Outokumpu (Finland), and ArcelorMittal Stainless (France). and its closed circulation The goal was to draw up processing guidelines for stainless steels as a prerequisite for their appli- system limits its water cation. For example, this was done with reference to B-pillars, which were tested in crash simulations. consumption. The results were verified in collaboration with leading suppliers of simulation programs for metal www.alcan.com forming. The project’s findings have been summarized in design and processing guidelines. A cost model was developed in collaboration with the Massachusetts Institute of Technology. ArcelorMittal plans to invest $1.3 billion annu- This program allows different production methods and materials to be compared directly and ally in its European the optimum stainless steel solution determined. flat-bar steel production For more information: Erik Walner, ThyssenKrupp Stainless AG, Germany; tel: 49 203 52 45130; plants until 2012. -

Beläggningsanalys Av Motorprovningen Vid Volvo Aero
Examensarbete LITH-ITN-KTS-EX--05/003--SE Beläggningsanalys av motorprovningen vid Volvo Aero Corporation Fredrik Bark 2005-01-28 Department of Science and Technology Institutionen för teknik och naturvetenskap Linköpings Universitet Linköpings Universitet SE-601 74 Norrköping, Sweden 601 74 Norrköping LITH-ITN-KTS-EX--05/003--SE Beläggningsanalys av motorprovningen vid Volvo Aero Corporation Examensarbete utfört i kommunikation- och transportsystem vid Linköpings Tekniska Högskola, Campus Norrköping Fredrik Bark Handledare Tomas Mars Examinator Martin Rudberg Norrköping 2005-01-28 Datum Avdelning, Institution Date Division, Department Institutionen för teknik och naturvetenskap 2005-01-28 Department of Science and Technology Språk Rapporttyp ISBN Language Report category _____________________________________________________ x Svenska/Swedish Examensarbete ISRN LITH-ITN-KTS-EX--05/003--SE Engelska/English B-uppsats _________________________________________________________________ C-uppsats Serietitel och serienummer ISSN x D-uppsats Title of series, numbering ___________________________________ _ ________________ _ ________________ URL för elektronisk version http://www.ep.liu.se/exjobb/itn/2005/kts/003/ Titel Title Beläggningsanalys av motorprovningen vid Volvo Aero Corporation Författare Author Fredrik Bark Sammanfattning Abstract Detta är resultatet av en studie som har utförts vid motorprovningen på Volvo Aero Corporation i Trollhättan. Motorprovningen provar flygplansmotorer, komponenter till dessa och rymddetaljer samt utför underhåll och utveckling av Volvo Aeros testceller, TC. Till dessa testceller kommer ett antal olika motormodeller för prov snarast möjligt. Motorprovningen står nu inför vissa större beslut om att eventuellt lägga ner en av testcellerna och överföra dess motorer till en annan testcell. Motorprovningen har idag inget verktyg för att mäta hur stor kapacitet de olika testcellerna har, och om denna nerläggning då är möjlig. -

The Power for Flight: NASA's Contributions To
The Power Power The forFlight NASA’s Contributions to Aircraft Propulsion for for Flight Jeremy R. Kinney ThePower for NASA’s Contributions to Aircraft Propulsion Flight Jeremy R. Kinney Library of Congress Cataloging-in-Publication Data Names: Kinney, Jeremy R., author. Title: The power for flight : NASA’s contributions to aircraft propulsion / Jeremy R. Kinney. Description: Washington, DC : National Aeronautics and Space Administration, [2017] | Includes bibliographical references and index. Identifiers: LCCN 2017027182 (print) | LCCN 2017028761 (ebook) | ISBN 9781626830387 (Epub) | ISBN 9781626830370 (hardcover) ) | ISBN 9781626830394 (softcover) Subjects: LCSH: United States. National Aeronautics and Space Administration– Research–History. | Airplanes–Jet propulsion–Research–United States– History. | Airplanes–Motors–Research–United States–History. Classification: LCC TL521.312 (ebook) | LCC TL521.312 .K47 2017 (print) | DDC 629.134/35072073–dc23 LC record available at https://lccn.loc.gov/2017027182 Copyright © 2017 by the National Aeronautics and Space Administration. The opinions expressed in this volume are those of the authors and do not necessarily reflect the official positions of the United States Government or of the National Aeronautics and Space Administration. This publication is available as a free download at http://www.nasa.gov/ebooks National Aeronautics and Space Administration Washington, DC Table of Contents Dedication v Acknowledgments vi Foreword vii Chapter 1: The NACA and Aircraft Propulsion, 1915–1958.................................1 Chapter 2: NASA Gets to Work, 1958–1975 ..................................................... 49 Chapter 3: The Shift Toward Commercial Aviation, 1966–1975 ...................... 73 Chapter 4: The Quest for Propulsive Efficiency, 1976–1989 ......................... 103 Chapter 5: Propulsion Control Enters the Computer Era, 1976–1998 ........... 139 Chapter 6: Transiting to a New Century, 1990–2008 .................................... -

Volvo Aero to Partner with Pratt & Whitney on Geared Turbofan™ Engine
Press Information Volvo Aero to Partner with Pratt & Whitney on Geared Turbofan™ Engine Volvo Aero has entered into an agreement with aircraft engine manufacturer Pratt & Whitney to join P&W’s Geared Turbofan™ engine program. Under this arrangement, Volvo Aero will be responsible for three major components for both the Mitsubishi Regional Jet (MRJ) and the Bombardier CSeries aircraft engines. The Geared Turbofan engine will be a product unique in the aircraft industry, bringing double-digit reductions in fuel burn, environmental emissions, engine noise and operating costs. For Volvo Aero, the agreement is expected to result in sales of SEK 50 billion during 40 years, the largest involvement in a commercial engine program ever. Two years ago, Volvo Aero and Pratt & Whitney signed an agreement to demonstrate new technology for the new Geared Turbofan engine. Since then, Volvo Aero has worked to develop advanced light weight technologies for the new engine concept. Volvo Aero brings expertise in turbine exhaust case technology to development of the Geared Turbofan engine. According to the agreement, Volvo Aero will participate as a partner in design, development, production and aftermarket in this engine project, with overall responsibility for the Intermediate Case and Turbine Exhaust Case as well as Low Pressure Turbine Shaft production responsibility. “We are delighted to have reached this agreement with Pratt & Whitney, not least because we know that this engine will contribute to improving the environment by reducing fuel consumption, emissions and noise,” says Olof Persson, President of Volvo Aero. “Participating in an engine concept that has excellent prospects for enhancing our current program portfolio in this thrust region of the engine market is also an important sign of success for Volvo Aero. -

Turbomachinery Technology for High-Speed Civil Flight
4 NASA Technical Memorandum 102092 . Turbomachinery Technology for High-speed Civil Flight , Neal T. Saunders and Arthur J. Gllassman Lewis Research Center Cleveland, Ohio Prepared for the 34th International Gas Turbine Aepengine Congress and Exposition sponsored by the American Society of Mechanical Engineers Toronto, Canada, June 4-8, 1989 ~ .. (NASA-TH-102092) TURBOHACHINERY TECHPCLOGY N89-24320 FOR HIGH-SPEED CIVIL FLIGHT (NBSEL, LEV& Research Center) 26 p CSCL 21E Unclas G3/07 0217641 TURBOMACHINERY TECHNOLOGY FOR HIGH-SPEED CIVIL FLIGHT Neal T. Saunders and Arthur J. Glassman ABSTRACT This presentation highlights some of the recent contributions and future directions of NASA Lewis Research Center's research and technology efforts applicable to turbomachinery for high-speed flight. For a high-speed civil transport application, the potential benefits and cycle requirements for advanced variable cycle engines and the supersonic throughflow fan engine are presented. The supersonic throughf low fan technology program is discussed. Technology efforts in the basic discipline areas addressing the severe operat- ing conditions associated with high-speed flight turbomachinery are reviewed. Included are examples of work in internal fluid mechanics, high-temperature materials, structural analysis, instrumentation and controls. c INTRODUCTION Future Emphasis Shifting to High-speed Flight Two years ago, the aeronautics community commemorated the 50th anniversary of the first successful operation of a turbojet engine. This remarkable feat by Sir Frank Whittle represents the birth of the turbine engine industry, which has greatly refined and improved Whittle's invention into the splendid engines that are flying today. NASA, as did its predecessor NACA, has assisted indus- try in the creation and development of advanced technologies for each new gen- eration of engines. -
Facing the Heat Barrier: a History of Hypersonics First Thoughts of Hypersonic Propulsion
Facing the Heat Barrier: A History of Hypersonics First Thoughts of Hypersonic Propulsion Republic’s Aerospaceplane concept showed extensive engine-airframe integration. (Republic Aviation) For takeoff, Lockheed expected to use Turbo-LACE. This was a LACE variant that sought again to reduce the inherently hydrogen-rich operation of the basic system. Rather than cool the air until it was liquid, Turbo-Lace chilled it deeply but allowed it to remain gaseous. Being very dense, it could pass through a turbocom- pressor and reach pressures in the hundreds of psi. This saved hydrogen because less was needed to accomplish this cooling. The Turbo-LACE engines were to operate at chamber pressures of 200 to 250 psi, well below the internal pressure of standard rockets but high enough to produce 300,000 pounds of thrust by using turbocom- pressed oxygen.67 Republic Aviation continued to emphasize the scramjet. A new configuration broke with the practice of mounting these engines within pods, as if they were turbojets. Instead, this design introduced the important topic of engine-airframe integration by setting forth a concept that amounted to a single enormous scramjet fitted with wings and a tail. A conical forward fuselage served as an inlet spike. The inlets themselves formed a ring encircling much of the vehicle. Fuel tankage filled most of its capacious internal volume. This design study took two views regarding the potential performance of its engines. One concept avoided the use of LACE or ACES, assuming again that this craft could scram all the way to orbit. Still, it needed engines for takeoff so turbo- ramjets were installed, with both Pratt & Whitney and General Electric providing Lockheed’s Aerospaceplane concept. -

The SEPR 844 Reusable Liquid Rocket Engine for Mirage Combat Aircraft H
AlAA 90-1835 IJ The SEPR 844 Reusable liquid Rocket Engine for Mirage Combat Aircraft H. Grosdemange Societe Europeene de Propulsion Vernon, FRANCE G. Schaeffer Avions Marcel Dassault-Breguet Aviation Saint Cloud FRANCE AIAAISAEIASM ElASEE 26th Joint Propulsion Conference \ July 16-18, 1990 / Orlando, FL For permission to copy or republish, contact the American institute of Aeronautics and Astronautics 370 L’Enfant Promenade, S.W., Washington, D.C. 20024 AIM-90-1835 THE SEPR 844 REUSABLE LIQUID ROCKET ENGINE FOR MIRAGE COMBAT AIRCRAFT HervC GROSDEMANGE Socittt Euro@enne de Propulsion Fori3 de Vernon Vernon - FRANCE Guy SCHAEFFER Avions Marcel Dassault-Brtguet Aviation Quai Marcel Dassault Saint Cloud - FRANCE ABSTRACT The SEPR 844 rocket engine for Mirage I11 combat aircraft is the last version of a bipropellant rocket engine family developed by SEP for aircraftpropulsion. The SEPR 844 is a 15 kN thrust, single-chamber rocket engine. It operates with nitric acid and aircraft supplied kerosene. The ignition is made with a hypergolic nitric acid - TX2 combustion. Thechamber is fed by twocentrifugalpumps driven by an auxiliary shaft coming from the aircraft turbojet engine. The combustion chamber is regeneratively cooled and operates at 2.35 MPa pressure. SinceDecember 1961,275enginesoftheSEPR84class(SEPR 841 and SEPR 844) have been used operationnaly in six countries and have completed more than 10000 flights with a 99 % success rate and a high availability : These engine demonstrated more than SO ~~~ ignitions without removal and can be serviced in less than 15 Figure I :SEPR 844 Rocket engine. minutes. 1 Copyright 0 1990 American Institute of Aeronautics and Astronautics, Inc.