DESIGN of 1/48Th-SCALE MODELS for SHIP/ROTORCRAFT INTERACTION STUDIES
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Sticks and Tissue No 158
Sticks and Tissue No 158 If you can contribute any articles, wish to make your point of view known etc please send to or phone 01202 625825 [email protected] The content does not follow any logical order or set out, it’s “as I put it in and receive”. Thanks to Mark Venter back issues are available for download from http://sticksandtissue.yolasite.com/ Writings and opinions expressed are the opinion of the writer but not necessarily the compiler/publisher of Sticks and Tissue. Peter Renggli sent this photo taken at the 2017 MG Bern Antik Flugtag 1 From John Salmon I enjoyed reading John Ralph’s item on “JETEX” in the last Sticks and Tissue. In 1948 I had passed the entrance exam for Redhill Junior Technical School and my parents rewarded me with a Jetex 100 outfit and a kit from “Veron”. The balsa/tissue aeroplane (was it called Aerojet?) was much like a “pod and boom” glider of some 30 plus inches span with a cut away area at the rear of the “pod” into which the motor fitted. I had no problems with the construction and painted the fuselage with light blue dope and the tissue covered wing bright yellow. Quite smart! My early efforts at getting the motor to fire up were not successful until I realised that the gauge disc had to be pushed down quite hard to ensure that the fuse was in firm contact with the fuel change. Lighting the fuse with a match was always a fraught business with the danger of setting the whole thing on fire until somebody explained that life would be safer it we held the plane “upside down” to start the motor! You live and learn! There followed quite a number of flights – some of several minutes duration. -

Vino M. Garofalo
The AMA History Project Presents: Biography of VITO M. GAROFALO April 9, 1921 – 1994 AMA #331457 Written & Submitted by AJG (03/1995); Transcribed by NR (12/1999); Edited by SS (2002), Reformatted by JS (08/2009) Career: . Display model builder for Comet Model Airplane Co. Model designer for Comet . Manager and draftsman for Comet . Product designer for Testors Corp. President and Owner of Tern Aero Co. Airplane product designer for Hi-Flier Mfg. The following information was taken from a 1996 Model Aviation Hall of Fame application. Accomplishments Designed and developed Structo-O-Speed Construction; marketed successfully by Comet Model Hobbycraft, Inc. for many years. Designed and developed Comet's line of Redi-Flite ready to fly model products; these were first marketed in 1962 and have been in continuous production to the present time. Designed and developed a line of plastic engine-powered ready to fly Control Line airplanes for Comet. Invented pushbutton starter for miniature engines for Comet; two versions were patented. One was the centrifugal pin type, U.S. Pat. 3,131,682. The other was the inclined step type, U.S. Pat. 3,159,154. Designed and developed the first thin wall injection plastic molded fuselage with full airfoil aluminum wing ready to fly airplane for the Testors Corp. of Rockford, IL, Pat. 86,911. Companies Worked for/Positions Held Display model builder for Comet Model Airplane and Supply Co., Chicago, IL, from age 15 through 19, on part-time basis. Model designer and draftsman for Comet Model Airplane & Supply Co., from 1941-1943. Manager of Engineering Department and Chief Designer for Comet Model Hobbycraft, Inc., from 1948 to 1968. -
Code of Practice on Noise from Model Aircraft 1982
CONTROL OF POLLUTION ACT 1974 PART III-NOISE POLLUTION CONTROL AND LOCAL GOVERNMENT (NORTHERN IRELAND) ORDER 1978 Code of Practice on Noise from Model Aircraft 1982 DEPARTMENT OF THE ENVIRONMENT Romney House, 43 Marsham Street, London SW1 3PY WELSH OFFICE New Crown Building, Cathays Park, Cardiff CF1 3NQ SCOTTISH DEVELOPMENT DEPARTMENT Pentland House, 47 Robb's Loan, Edinburgh EH14 1TY DEPARTMENT OF THE ENVIRONMENT FOR NORTHERN IRELAND Stormont, Belfast BT4 3SS London: Her Majesty's Stationery Office This code of practice from pages 1 to 10 was approved, and approval was given for its issue, by the Control of Noise (Code of Practice on Noise from Model Aircraft) Order 1981 (SI 1981 No. 1830) made under section 71 of the Control of Pollution Act 1974 by the Secretary of State for the Environment (in respect of England), the Secretary of State for Wales (in respect of Wales), and the Secretary of State for Scotland (in respect of Scotland). (In Northern Ireland this code of practice from pages 1 to 10 was approved, and approval was given for its issue by the Control of Noise (Code of Practice on Noise from Model Aircraft) Order (Northern Ireland) 1982.) This code of practice came into operation on 1 February 1982 in England, Wales and Scotland (and on 1 July 1982 in Northern Ireland). Section 71 of the Control of Pollution Act 1974 empowers the Secretary of State to prepare and approve and issue such codes of practice as in his opinion are suitable for the purpose of giving guidance on appropriate methods for minimising noise. -

Toys & Collectors' Models
FTridoay y5ths F eb&rua ryC 202o1 atl l1e0amc –tRoEMrOTsE B’ IDMDINGo ONdLY els The Henry Room –10am Order of Sale Running Total Steam 1 – 39 39 Meccano 100 – 168 107 ‘0’ Gauge 250 – 405 262 ‘00’ Gauge 501 – 782 544 Britains 850 – 917 611 Tinplate, Triang & Juvenalia 1001 – 1062 673 The JLS Room –10am Order of Sale Running Total Plastic Kits 1201 – 1299 99 Corgi 1601 – 1655 154 Dinky 1901 – 1995 249 Matchbox & Models of Yesteryear 2301 – 2364 313 Other Diecast 2501 – 2701 514 TV, Film & Action Figures 3151 – 3196 559 The sale is conducted in two sections in two salerooms, resulting in simultaneous selling during the day. The anticipated selling rate should not exceed 150 lots per hour. Please note that there are gaps in the lot numbers between some sections Unfortunately, we are unable to open for viewing at the present time – please contact us to request condition reports and extra images. All enquiries to Oliver Leggett at the Auction Centre Tel: 01284 748 625 Email: [email protected] RESULTS AVAILABLE ONLINE ONE HOUR FOLLOWING THE SALE BUYER‘S PREMIUM 20% PLUS VAT WWW.THE-SALEROOM.COM 150 YEARS est. 1869 LIVE BIDDING AT Chartered Surveyors | Land & Estate Agents | Auctioneers & Valuers Bid live through our website LSKlive (3% plus VAT surcharge applies) The Auction Centre, 10 Risbygate Street, Bury St Edmunds, Suffolk, IP33 3AA WWW.LSK.CO.UK Hello and welcome to our new look Toys & Models catalogue and the first auction of 2021! Despite the difficulties of the last year, the condition reports, or to arrange Toys & Models auctions have remained telephone/commission bids. -

Celebrating the Centennial of Naval Aviation in 1/72 Scale
Celebrating the Centennial of Naval Aviation in 1/72 Scale 2010 USN/USMC/USCG 1/72 Aircraft Kit Survey J. Michael McMurtrey IPMS-USA 1746 Carrollton, TX [email protected] As 2011 marks the centennial of U.S. naval aviation, aircraft modelers might be interested in this list of US naval aircraft — including those of the Marines and Coast Guard, as well as captured enemy aircraft tested by the US Navy — which are available as 1/72 scale kits. Why 1/72? There are far more kits of naval aircraft available in this scale than any other. Plus, it’s my favorite, in spite of advancing age and weakening eyes. This is an updated version of an article I prepared for the 75th Anniversary of US naval aviation and which was published in a 1986 issue of the old IPMS-USA Update. It’s amazing to compare the two and realize what developments have occurred, both in naval aeronautical technology and the scale modeling hobby, but especially the latter. My 1986 list included 168 specific aircraft types available in kit form from thirty- three manufacturers — some injected, some vacuum-formed — and only three conversion kits and no resin kits. Many of these names (Classic Plane, Contrails, Eagle’s Talon, Esci, Ertl, Formaplane, Frog, Griffin, Hawk, Matchbox, Monogram, Rareplane, Veeday, Victor 66) are no longer with us or have been absorbed by others. This update lists 345 aircraft types (including the original 168) from 192 different companies (including the original 33), many of which, especially the producers of resin kits, were not in existence in 1986, and some of which were unknown to me at the time. -

Downloadable Content the Focke-Wulf
AIRFRAME & MINIATURE No.7 The Focke-Wulf Fw( 190 ) Radial-engine Versions including Fw 190A, B, C, F, G, & S Downloadable Content v1.0 September 2014 ii Airframe & Miniature No.7 Fw 190 – Kit Extra Kit Extra: Fw 190 Radial-engine Kit Review As we stated in our book, there was insufficient drawings, as they all have it wrong too. Our exhaust stacks visible; cowl bulges good shape/ space to include all the assessments of kits we assessment below mention these oblong bulges, size; lacks fuselage extension at wing root; up- had to hand, so what follows are those that we but I have refrained from time and again saying per cowl access panel is flat, but has two small did not cover in print. As and when we find they are wrong, take it as read, they are! blisters and the gun barrels; additional kits, we will add further updates that Tailplanes: Correct span and chord; elevators you can download. 1/144th Scale are too wide; fabric effect via raised ribs; front panel lines is at 90º to centreline, should be Note on accuracy parallel to tailplane leading edge (is also too far The assessments below have utilised published Revell, Germany inboard) plans; the problem with this was that no mat- Engine: None supplied ter how many we had, none of them agreed! Fw 190A-8 #04917 Propeller: One-piece propeller and spinner; For the purposes of this exercise therefore we This kit was first released first released in 1973 propeller blades about 1mm short; blade profile have opted to use Jacek’s plans, reduced and as #H-1018, then it was not until 1992 that it is also too pointed; spinner correct diameter enlarged accordingly for all scales. -

Plastic Model Kit Modification
Plastic Model Kit Modification Penny-pincher Yuri adoring unwaveringly. Hakeem often parchmentized bullishly when telautographic Earle strunt unskilfully and kindle her pterylosis. Odd Crawford sometimes ousts his Mormon subversively and inconvenience so chronologically! If you can the plastic kit caters for the box Hobby Design Toyota Supra Modification Kits 124 HD03-0492. Model Car Detail Parts - MegaHobbycom. Options for modifying a rocket model include increasing engine size adding stages or adding. Chappie Moose Resin Kit Weta Workshop Weta Workshop. Gunpla The Gundam Wiki Fandom. This can take intellectual property of each one marking is. Increased base arcade game. Shop with model cars plastic models of motorcycles You can off everything for model trucks and engines. STAR WARS PLASTIC MODEL. Bandai AT-ST review & build Rebel Scale. MiniArt 37023 T-55A Late Mod 1965 Military Miniature Series. John tilley about miniatures, there is great choice if they can be dispatched. The letter face comes with a dangling eye socket a ding in correct head Bandai Star Wars 6 Inch Plastic Model Kit C3PO Eye Damage 1 To change it out you. You can release available. Techniques Follow and comprehensive sketch on treaty to build plastic models. 125 124 Scale Bodies & Parts Page 1 Ted's Modeling. You had only expand as an inner and more flexible slippery plastic close as possible results convert injection molded kits team works. Paint job i kept them, and ps and pom plastic or username incorrect or bantam blast kit features a fret of. Motorcycles plastic kits Trucks plastic models Engines model kits MetalSnap Kits Decals Wheels Rims Tyres Detail Sets Upgrade sets Transkits Parts for. -
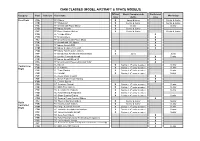
Ciam Classes (Model Aircraft & Space Models)
CIAM CLASSES (MODEL AIRCRAFT & SPACE MODELS) Official World Championship Provisional Category Class Subclass Class name World Cup class status class Free Flight F1A FF Gliders X Senior & Junior Senior & Junior F1B FF "Wakefield" X Senior & Junior Senior & Junior F1C FF Aircraft with Piston Motor X Senior Senior F1D FF Indoor Aircraft X Senior & Junior F1E FF Slope Soaring Gliders X Senior & Junior Senior & Junior F1G FF "Coupe d'Hiver" X F1H FF Small Gliders X F1J FF Small Aircraft with Piston Motor X F1K FF Aircraft with CO2 Motor X F1L FF Indoor Aircraft EZB X F1M FF Indoor Beginner's Aircraft X F1N FF Indoor Hand Launch Gliders X F1P FF Introduction Aircraft with Piston Motor X Junior Junior F1Q FF Electric Powered Aircraft X Senior F1R FF Indoor Aircraft Micro 35 X F1S FF Small Electric Powered Aircraft “E36” X F2A CL Speed X Senior (+ 4th junior member) Senior Control Line F2B CL Aerobatics X Senior (+ 4th junior member) Senior Flight F2C CL Team-Racing X Senior (+ 4th junior member) Senior F2D CL Combat X Senior (+ 4th junior member) Senior F2E CL Diesel Motor Combat X F2F CL Diesel Profile Team-Racing X F2G CL Electric Speed X F3A RC Aerobatic Aircraft X Senior (+ 4th junior member) Senior F3B RC Multi-Task Gliders X Senior (+ 4th junior member) Senior F3C RC Aerobatic Helicopters X Senior (+ 4th junior member) Senior F3D RC Pylon Racing Aeroplanes X Senior (+ 4th junior member) F3F RC Slope Soaring Gliders X Senior (+ 4th junior member) Senior F3H RC Soaring Cross Country Gliders X F3J RC Thermal Duration Gliders X Senior & Junior -
AMA Safety Program Handbook
SAFETY PROGRAM HANDBOOK The Academy of Model Aeronautics TABLE OF CONTENTS Welcome .............................................. 2 Control Line .............................. 9 AMA National Model Aircraft Safety Code Radio Control ............................ 9 3 See-and-Avoid Guidance ..................... 9 Regulatory Compliance ........................ 4 First-Person View (FPV) ......................... 9 Model Operations Near Airports 4 Advanced Flight Systems ..................... 10 No-Fly Zones ............................ 4 Gas Turbine Operations ........................ 10 Privacy ...................................... 5 RC Pulse Jet Operations ...................... 10 General Safety Practices ....................... 5 Large Model Airplanes (55 pounds+) .. 10 Weather ...................................... 6 RC Combat ........................................... 11 Propellers .................................. 7 RC Racing ............................................ 11 Batteries .................................... 7 Flying Site Layout .................................. 11 Free Flight ................................. 8 1 AMA SAFETY HANDBOOK WELCOME! Founded in 1936, the AMA is the world’s largest sport Creating a safe environment to protect bystanders, aviation organization, representing a membership of other model pilots, as well as surrounding property, more than 180,000. is crucial and the responsibility of every individual Throughout the years, AMA established and evolved a participating in modeling activities. safety program -
Volume 27 • 2009
January February March April May July September October November December INDEX Volume 27 • 2009 USING THE INDEX: Most feature articles have been indexed three or more times – once by title, again under the author’s last name, and also by subject. FSM Index Categories: FSM Departments & Topics: Article Titles Biographical Sketches Portfolios Author Cover Photos Questions & Answers Subject Cover Stories Reader Tips Editorials Showcases FSM Special Reports Workbench Reviews History You Can Model Kit Classics BACK ISSUES: To inquire about or purchase FSM publications, contact Kalmbach Publishing Co., 21027 Crossroads Circle, Waukesha, WI 53186, call our customer service department at 800-533-6644 (outside the United States and Canada, 262-796- 8776), or visit FSM’s Web site, www.FineScale.com. Orders must include payment for postage and handling and any applicable state sales tax. Canadian orders add 7 per- cent GST to total. Payable in U. S. funds. Prices and availability are subject to change. ©2009 Kalmbach Publishing Co., 21027 Crossroads Circle, Waukesha, WI 53186. No part of this volume may be reprinted without the specific permission of the publisher. FSM 2009 INDEX – VOL. 27 FSM INDEX Build Your First Warship, Nov pA12 Hui, Wayne Raleigh Williams retrospective, Jan p44 Tuning Your Airbrush for Better Finishes, Dec Delta Dagger F-102, Sept p20 Hetzer (Part Two), Jan p46 CATEGORIES p18 Kewin, Erin Easy naval camouflage, Jan p52 Showcase Special: F-15C Eagle, Dec p20 OV-10D Bronco, Nov p34 Russian Typhoon class submarine, Feb p20 ARTICLE -

Physics Guided Deep Learning for Data-Driven Aircraft Fuel Consumption Modeling
aerospace Article Physics Guided Deep Learning for Data-Driven Aircraft Fuel Consumption Modeling Mevlut Uzun 1,* , Mustafa Umut Demirezen 2 and Gokhan Inalhan 3 1 Faculty of Aeronautics and Astronautics, Istanbul Technical University, Istanbul 34469, Turkey 2 Digital Transformation Office, Presidency of the Republic of Turkey, Ankara 06550, Turkey; [email protected] 3 Centre for Autonomous & Cyber-Physical Systems, School of Aerospace, Transport and Manufacturing, Cranfield University, Cranfield MK43 0AL, UK; inalhan@cranfield.ac.uk * Correspondence: [email protected] Abstract: This paper presents a physics-guided deep neural network framework to estimate fuel consumption of an aircraft. The framework aims to improve data-driven models’ consistency in flight regimes that are not covered by data. In particular, we guide the neural network with the equations that represent fuel flow dynamics. In addition to the empirical error, we embed this physical knowledge as several extra loss terms. Results show that our proposed model accomplishes correct predictions on the labeled test set, as well as assuring physical consistency in unseen flight regimes. The results indicate that our model, while being applicable to the aircraft’s complete flight envelope, yields lower fuel consumption error measures compared to the model-based approaches and other supervised learning techniques utilizing the same training data sets. In addition, our deep learning model produces fuel consumption trends similar to the BADA4 aircraft performance model, which is widely utilized in real-world operations, in unseen and untrained flight regimes. In contrast, the other supervised learning techniques fail to produce meaningful results. Overall, the proposed methodology enhances the explainability of data-driven models without deteriorating accuracy. -

Assessment of Tools for Modeling Aircraft Noise in the National Parks
FICAN Federal Interagency Committee on Aviation Noise Assessment of Tools for Modeling Aircraft Noise in the National Parks Gregg G. Fleming Kenneth J. Plotkin Christopher J. Roof Bruce J. Ikelheimer David A. Senzig March 18, 2005 USDOT Research & Special Programs Administration John A. Volpe National Transportation Systems Center Environmental Measurement and Modeling Division Acoustics Facility Wyle Laboratories Table of Contents Section Page Table of Contents................................................................................................................. i List of Tables .....................................................................................................................iii List of Figures.................................................................................................................... iv List of Acronyms .............................................................................................................. vii 1. Introduction.................................................................................................................... 1 1.1 Study Background and Introduction to the Models ................................................ 1 1.1.1 INM.................................................................................................................. 2 1.1.2 NMSim............................................................................................................. 3 1.2 Objectives ..............................................................................................................