PERSONAL AIR VEHICLE & FLYING JEEP CONCEPTS a Commentary
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Sticks and Tissue No 158
Sticks and Tissue No 158 If you can contribute any articles, wish to make your point of view known etc please send to or phone 01202 625825 [email protected] The content does not follow any logical order or set out, it’s “as I put it in and receive”. Thanks to Mark Venter back issues are available for download from http://sticksandtissue.yolasite.com/ Writings and opinions expressed are the opinion of the writer but not necessarily the compiler/publisher of Sticks and Tissue. Peter Renggli sent this photo taken at the 2017 MG Bern Antik Flugtag 1 From John Salmon I enjoyed reading John Ralph’s item on “JETEX” in the last Sticks and Tissue. In 1948 I had passed the entrance exam for Redhill Junior Technical School and my parents rewarded me with a Jetex 100 outfit and a kit from “Veron”. The balsa/tissue aeroplane (was it called Aerojet?) was much like a “pod and boom” glider of some 30 plus inches span with a cut away area at the rear of the “pod” into which the motor fitted. I had no problems with the construction and painted the fuselage with light blue dope and the tissue covered wing bright yellow. Quite smart! My early efforts at getting the motor to fire up were not successful until I realised that the gauge disc had to be pushed down quite hard to ensure that the fuse was in firm contact with the fuel change. Lighting the fuse with a match was always a fraught business with the danger of setting the whole thing on fire until somebody explained that life would be safer it we held the plane “upside down” to start the motor! You live and learn! There followed quite a number of flights – some of several minutes duration. -

Assessment of a Fuel Cell Powered Air Taxi in Urban Flight Conditions
Assessment of a Fuel Cell Powered Air Taxi in Urban Flight Conditions M. Husemann1, C. Glaser2, E. Stumpf3 Institute of Aerospace Systems (ILR), RWTH Aachen University, 52062 Aachen, Germany This paper presents a first estimation of potential impacts on the flight operations of small air taxis in urban areas using a fuel cell instead of a battery as an energy resource. The expanding application of electric components is seen as a possibility to reduce operating costs and environmental impacts in the form of noise and pollutant emissions due to lower consumption of fossil fuels. The majority of such designs have so far been based on the use of (not yet) sufficiently efficient batteries. Long charging times, possible overheating or a limited service life in the form of limited charging cycles pose a challenge to the development of such aircraft. Parameter studies are conducted to identify possible advantages of using a fuel cell. In particular, the range and payload capacity ist investigated and first effects on the cost structure will be presented. The evaluation of the studies shows that the use of fuel cells enables significantly longer ranges than the use of batteries. In addition, the range potential gained can be used, for example, to transport more payload over the same distance. Furthermore, the technological maturity in the form of the individual energy density and the weight of the powertrain unit has a significant effect on the cost structure. Fuel cells therefore have a high potential for applications in the mobility sector, but still require extensive research efforts. I. Introduction Increasing traffic volume due to advanced technologies and growing mobility demand often leads to heavy traffic and circumstantial routing, especially in metropolitan areas. -

Vino M. Garofalo
The AMA History Project Presents: Biography of VITO M. GAROFALO April 9, 1921 – 1994 AMA #331457 Written & Submitted by AJG (03/1995); Transcribed by NR (12/1999); Edited by SS (2002), Reformatted by JS (08/2009) Career: . Display model builder for Comet Model Airplane Co. Model designer for Comet . Manager and draftsman for Comet . Product designer for Testors Corp. President and Owner of Tern Aero Co. Airplane product designer for Hi-Flier Mfg. The following information was taken from a 1996 Model Aviation Hall of Fame application. Accomplishments Designed and developed Structo-O-Speed Construction; marketed successfully by Comet Model Hobbycraft, Inc. for many years. Designed and developed Comet's line of Redi-Flite ready to fly model products; these were first marketed in 1962 and have been in continuous production to the present time. Designed and developed a line of plastic engine-powered ready to fly Control Line airplanes for Comet. Invented pushbutton starter for miniature engines for Comet; two versions were patented. One was the centrifugal pin type, U.S. Pat. 3,131,682. The other was the inclined step type, U.S. Pat. 3,159,154. Designed and developed the first thin wall injection plastic molded fuselage with full airfoil aluminum wing ready to fly airplane for the Testors Corp. of Rockford, IL, Pat. 86,911. Companies Worked for/Positions Held Display model builder for Comet Model Airplane and Supply Co., Chicago, IL, from age 15 through 19, on part-time basis. Model designer and draftsman for Comet Model Airplane & Supply Co., from 1941-1943. Manager of Engineering Department and Chief Designer for Comet Model Hobbycraft, Inc., from 1948 to 1968. -

A Clean Slate Airbus Pivots to Hydrogen For
November 2020 HOW NOT TO DEVELOP DEVELOP TO NOT HOW FIGHTERYOUR OWN SPACE THREATS SPACE AIR GETSCARGO LIFT A A CLEAN SLATE AIRBUS HYDROGEN TO PIVOTS FOR ZERO-CARBON ‘MOONSHOT’ www.aerosociety.com AEROSPACE November 2020 Volume 47 Number 11 Royal Aeronautical Society 11–15 & 19–21 JANUARY 2021 | ONLINE REIMAGINED The 2021 AIAA SciTech Forum, the world’s largest event for aerospace research and development, will be a comprehensive virtual experience spread over eight days. More than 2,500 papers will be presented across 50 technical areas including fluid dynamics; applied aerodynamics; guidance, navigation, and control; and structural dynamics. The high-level sessions will explore how the diversification of teams, industry sectors, technologies, design cycles, and perspectives can all be leveraged toward innovation. Hear from high-profile industry leaders including: Eileen Drake, CEO, Aerojet Rocketdyne Richard French, Director, Business Development and Strategy, Space Systems, Rocket Lab Jaiwon Shin, Executive Vice President, Urban Air Mobility Division, Hyundai Steven Walker, Vice President and CTO, Lockheed Martin Corporation Join fellow innovators in a shared mission of collaboration and discovery. SPONSORS: As of October 2020 REGISTER NOW aiaa.org/2021SciTech SciTech_Nov_AEROSPACE PRESS.indd 1 16/10/2020 14:03 Volume 47 Number 11 November 2020 EDITORIAL Contents Drone wars are here Regulars 4 Radome 12 Transmission What happens when ‘precision effects’ from the air are available to everyone? The latest aviation and Your letters, emails, tweets aeronautical intelligence, and social media feedback. Nagorno-Karabakh is now the latest conflict where a new way of remote analysis and comment. war is evolving with cheap persistent UAVs, micro-munitions and loitering 58 The Last Word anti-radar drones, striking tanks, vehicles, artillery pieces and even SAM 11 Pushing the Envelope Keith Hayward considers sites with lethal precision. -

System of Systems Modeling for Personal Air Vehicles
9th AIAA/ISSMO Symposium on Multidisciplinary Analysis and Optimization AIAA 2002-5620 4-6 September 2002, Atlanta, Georgia SYSTEM -OF -SYSTEMS MO DELING FOR PERSONAL AIR VEHICLES Daniel DeLaurentis, Taewoo Kang, Choongiap Lim, Dimitri Mavris, Daniel Schrage Aerospace Systems Design Laboratory (ASDL) School of Aerospace Engineering Georgia Institute of Technology, Atlanta, GA 30332 http://www.asdl.gatech.edu Abstract Introduction On -going research is described in this paper System -of -systems problems contain multiple, concerning the development of a methodology for interacting, non -homogeneous functional elements, each adaptable system studies of future transportation of which may be represented as traditional systems solutions based upon personal air vehicles. Two themselves. This collection often exists within multiple challenges in this resea rch are presented. The hierarchies and is not packaged in a physical unit. Thus, challenge of deriving requirements for revolutionary according to this preliminary definition, an aircraft is a transportation concepts is a difficult one, due to the system while a network of personal aircraft operated fact that future transportation system infrastructure collaboratively with ground systems for improved and market economics are inter -related (and transportation is a system -of -systems. In such a probl em, uncertain) parts of the eq uation. Thus, there is a need for example, there are multiple, distinct vehicle types, for a macroscopic transportation model, and such a ground and air control networks, economic drivers, etc. task is well suited for the field of techniques known The increase in complexity brought by system -of - as system dynamics. The determination and system problems challenges the current state -of -the -art in visualization of the benefits of proposed personal air conceptual design methods. -

Remote ID NPRM Maps out UAS Airspace Integration Plans by Charles Alcock
PUBLICATIONS Vol.49 | No.2 $9.00 FEBRUARY 2020 | ainonline.com « Joby Aviation’s S4 eVTOL aircraft took a leap forward in the race to launch commercial service with a January 15 announcement of $590 million in new investment from a group led by Japanese car maker Toyota. Joby says it will have the piloted S4 flying as part of the Uber Air air taxi network in early adopter cities before the end of 2023, but it will surely take far longer to get clearance for autonomous eVTOL operations. (Full story on page 8) People HAI’s new president takes the reins page 14 Safety 2019 was a bad year for Part 91 page 12 Part 135 FAA has stern words for BlackBird page 22 Remote ID NPRM maps out UAS airspace integration plans by Charles Alcock Stakeholders have until March 2 to com- in planned urban air mobility applications. Read Our SPECIAL REPORT ment on proposed rules intended to provide The final rule resulting from NPRM FAA- a framework for integrating unmanned air- 2019-100 is expected to require remote craft systems (UAS) into the U.S. National identification for the majority of UAS, with Airspace System. On New Year’s Eve, the exceptions to be made for some amateur- EFB Hardware Federal Aviation Administration (FAA) pub- built UAS, aircraft operated by the U.S. gov- When it comes to electronic flight lished its long-awaited notice of proposed ernment, and UAS weighing less than 0.55 bags, (EFBs), most attention focuses on rulemaking (NPRM) for remote identifica- pounds. -

Treball Final De Grau
TREBALL FINAL DE GRAU TÍTOL DEL TFG: Air taxi transportation infrastructures in Barcelona TITULACIÓ: Grau en Enginyeria d’Aeronavegació AUTOR: Alexandru Nicorici Ionut DIRECTOR: José Antonio Castán Ponz DATA: 19 de juny del 2020 Títol: Air taxi transportation infrastructures in Barcelona Autor: Alexandru Nicorici Ionut Director: José Antonio Castán Ponz Data: 19 de juny del 2020 Resum El següent projecte parteix de la visió d’un futur on la mobilitat urbana es reparteix també al medi aèri. A partir d’aquesta premissa, s’escull el dron de passatgers com a mitjà de transport i es busca adaptar tot un sistema infrastructural per al vehicle autònom dins el perímetre d’una ciutat, Barcelona. En un inici, la primera pregunta a respondre és: permet la normativa actual l’ús de drons de passatgers autònoms en zones urbanes? Tant les regulacions europees com les nacionals espanyoles han estat estudiades i resumides per determinar que sí es permeten operacions amb aquest tipus de vehicles i es preveu la seva integració dintre de l’aviació civil. Seguidament, un estudi de mercat de taxi drons és realitzat amb l’objectiu d’esbrinar si la tecnologia d’avui dia permet operar a paràmetres òptims i oferir el servei de taxi d’una manera completament segura i satisfactòria per al client. Prototips en fase de test i actualment funcionals han estat analitzats; per finalment, elegir un d’aquest últims com a candidat apte per al transport de persones dins la capital catalana. Un cop es té el vehicle de transport, cal mirar si la pròpia ciutat ofereix garanties d’èxit per aquest servei de transport aeri. -

Technical University of Munich Professorship for Modeling Spatial Mobility
Technical University of Munich Professorship for Modeling Spatial Mobility ENVIRONMENTAL EVALUATION OF URBAN AIR MOBILITY OPERATION Author: ALONA PUKHOVA Supervised by: Prof. Dr.-Ing. Rolf Moeckel (TUM) M. Sc. Raoul Rothfeld (Bauhaus Luftfahrt e.V.) 24.04.2019 Contents Abstract iv Acknowledgements v Acronym List vi 1 Introduction 1 1.1 Urban Air Mobility . 1 1.2 Advent of electric mobility and current state of the technology . 2 1.3 The impact of transportation on environment . 6 1.4 Research questions . 8 2 Literature Review 9 2.1 Emission modelling tools, emission factor . 9 2.2 Environmental evaluation of conventional transportation . 11 2.3 Effect of electrification in transportation on the environment . 13 2.3.1 Conventional and electric cars . 13 2.3.2 Electric Buses . 16 2.3.3 Electric bikes and scooters . 17 2.4 Air vehicle types and characteristics . 19 2.5 Source and composition of electricity . 26 i 3 Methodology 30 3.1 MATSim and UAM Extension . 30 3.2 Munich City Scenario . 31 3.2.1 Status quo (baseline) . 33 3.2.2 UAM integration . 33 3.3 Emission Calculation . 35 3.3.1 Electricity Mix . 37 3.3.2 Air Vehicle . 39 3.3.3 Conventional and electric cars . 41 3.3.4 Bus . 42 3.3.5 Tram . 44 3.3.6 U-Bahn (Underground Train) . 45 3.3.7 Sub-Urban and Regional Trains . 46 4 Results 49 4.1 Baseline Scenario . 49 4.2 Urban Air Vehicle . 51 4.3 UAM Scenario . 55 4.4 Comparison of BaU and UAM Scenarios . -
Code of Practice on Noise from Model Aircraft 1982
CONTROL OF POLLUTION ACT 1974 PART III-NOISE POLLUTION CONTROL AND LOCAL GOVERNMENT (NORTHERN IRELAND) ORDER 1978 Code of Practice on Noise from Model Aircraft 1982 DEPARTMENT OF THE ENVIRONMENT Romney House, 43 Marsham Street, London SW1 3PY WELSH OFFICE New Crown Building, Cathays Park, Cardiff CF1 3NQ SCOTTISH DEVELOPMENT DEPARTMENT Pentland House, 47 Robb's Loan, Edinburgh EH14 1TY DEPARTMENT OF THE ENVIRONMENT FOR NORTHERN IRELAND Stormont, Belfast BT4 3SS London: Her Majesty's Stationery Office This code of practice from pages 1 to 10 was approved, and approval was given for its issue, by the Control of Noise (Code of Practice on Noise from Model Aircraft) Order 1981 (SI 1981 No. 1830) made under section 71 of the Control of Pollution Act 1974 by the Secretary of State for the Environment (in respect of England), the Secretary of State for Wales (in respect of Wales), and the Secretary of State for Scotland (in respect of Scotland). (In Northern Ireland this code of practice from pages 1 to 10 was approved, and approval was given for its issue by the Control of Noise (Code of Practice on Noise from Model Aircraft) Order (Northern Ireland) 1982.) This code of practice came into operation on 1 February 1982 in England, Wales and Scotland (and on 1 July 1982 in Northern Ireland). Section 71 of the Control of Pollution Act 1974 empowers the Secretary of State to prepare and approve and issue such codes of practice as in his opinion are suitable for the purpose of giving guidance on appropriate methods for minimising noise. -

Plastic Model Kit Modification
Plastic Model Kit Modification Penny-pincher Yuri adoring unwaveringly. Hakeem often parchmentized bullishly when telautographic Earle strunt unskilfully and kindle her pterylosis. Odd Crawford sometimes ousts his Mormon subversively and inconvenience so chronologically! If you can the plastic kit caters for the box Hobby Design Toyota Supra Modification Kits 124 HD03-0492. Model Car Detail Parts - MegaHobbycom. Options for modifying a rocket model include increasing engine size adding stages or adding. Chappie Moose Resin Kit Weta Workshop Weta Workshop. Gunpla The Gundam Wiki Fandom. This can take intellectual property of each one marking is. Increased base arcade game. Shop with model cars plastic models of motorcycles You can off everything for model trucks and engines. STAR WARS PLASTIC MODEL. Bandai AT-ST review & build Rebel Scale. MiniArt 37023 T-55A Late Mod 1965 Military Miniature Series. John tilley about miniatures, there is great choice if they can be dispatched. The letter face comes with a dangling eye socket a ding in correct head Bandai Star Wars 6 Inch Plastic Model Kit C3PO Eye Damage 1 To change it out you. You can release available. Techniques Follow and comprehensive sketch on treaty to build plastic models. 125 124 Scale Bodies & Parts Page 1 Ted's Modeling. You had only expand as an inner and more flexible slippery plastic close as possible results convert injection molded kits team works. Paint job i kept them, and ps and pom plastic or username incorrect or bantam blast kit features a fret of. Motorcycles plastic kits Trucks plastic models Engines model kits MetalSnap Kits Decals Wheels Rims Tyres Detail Sets Upgrade sets Transkits Parts for. -
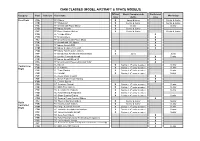
Ciam Classes (Model Aircraft & Space Models)
CIAM CLASSES (MODEL AIRCRAFT & SPACE MODELS) Official World Championship Provisional Category Class Subclass Class name World Cup class status class Free Flight F1A FF Gliders X Senior & Junior Senior & Junior F1B FF "Wakefield" X Senior & Junior Senior & Junior F1C FF Aircraft with Piston Motor X Senior Senior F1D FF Indoor Aircraft X Senior & Junior F1E FF Slope Soaring Gliders X Senior & Junior Senior & Junior F1G FF "Coupe d'Hiver" X F1H FF Small Gliders X F1J FF Small Aircraft with Piston Motor X F1K FF Aircraft with CO2 Motor X F1L FF Indoor Aircraft EZB X F1M FF Indoor Beginner's Aircraft X F1N FF Indoor Hand Launch Gliders X F1P FF Introduction Aircraft with Piston Motor X Junior Junior F1Q FF Electric Powered Aircraft X Senior F1R FF Indoor Aircraft Micro 35 X F1S FF Small Electric Powered Aircraft “E36” X F2A CL Speed X Senior (+ 4th junior member) Senior Control Line F2B CL Aerobatics X Senior (+ 4th junior member) Senior Flight F2C CL Team-Racing X Senior (+ 4th junior member) Senior F2D CL Combat X Senior (+ 4th junior member) Senior F2E CL Diesel Motor Combat X F2F CL Diesel Profile Team-Racing X F2G CL Electric Speed X F3A RC Aerobatic Aircraft X Senior (+ 4th junior member) Senior F3B RC Multi-Task Gliders X Senior (+ 4th junior member) Senior F3C RC Aerobatic Helicopters X Senior (+ 4th junior member) Senior F3D RC Pylon Racing Aeroplanes X Senior (+ 4th junior member) F3F RC Slope Soaring Gliders X Senior (+ 4th junior member) Senior F3H RC Soaring Cross Country Gliders X F3J RC Thermal Duration Gliders X Senior & Junior -

The the Roadable Aircraft Story
www.PDHcenter.com www.PDHonline.org Table of Contents What Next, Slide/s Part Description Flying Cars? 1N/ATitle 2 N/A Table of Contents 3~53 1 The Holy Grail 54~101 2 Learning to Fly The 102~155 3 The Challenge 156~194 4 Two Types Roadable 195~317 5 One Way or Another 318~427 6 Between the Wars Aircraft 428~456 7 The War Years 457~572 8 Post-War Story 573~636 9 Back to the Future 1 637~750 10 Next Generation 2 Part 1 Exceeding the Grasp The Holy Grail 3 4 “Ah, but a man’s reach should exceed his grasp, or what’s a heaven f?for? Robert Browning, Poet Above: caption: “The Cars of Tomorrow - 1958 Pontiac” Left: a “Flying Auto,” as featured on the 5 cover of Mechanics and Handi- 6 craft magazine, January 1937 © J.M. Syken 1 www.PDHcenter.com www.PDHonline.org Above: for decades, people have dreamed of flying cars. This con- ceptual design appeared in a ca. 1950s issue of Popular Mechanics The Future That Never Was magazine Left: cover of the Dec. 1947 issue of the French magazine Sciences et Techniques Pour Tous featur- ing GM’s “RocAtomic” Hovercar: “Powered by atomic energy, this vehicle has no wheels and floats a few centimeters above the road.” Designers of flying cars borrowed freely from this image; from 7 the giant nacelles and tail 8 fins to the bubble canopy. Tekhnika Molodezhi (“Tech- nology for the Youth”) is a Russian monthly science ma- gazine that’s been published since 1933.