Airstar: a UAV Platform for Flight Dynamics and Control System Testing
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Sticks and Tissue No 158
Sticks and Tissue No 158 If you can contribute any articles, wish to make your point of view known etc please send to or phone 01202 625825 [email protected] The content does not follow any logical order or set out, it’s “as I put it in and receive”. Thanks to Mark Venter back issues are available for download from http://sticksandtissue.yolasite.com/ Writings and opinions expressed are the opinion of the writer but not necessarily the compiler/publisher of Sticks and Tissue. Peter Renggli sent this photo taken at the 2017 MG Bern Antik Flugtag 1 From John Salmon I enjoyed reading John Ralph’s item on “JETEX” in the last Sticks and Tissue. In 1948 I had passed the entrance exam for Redhill Junior Technical School and my parents rewarded me with a Jetex 100 outfit and a kit from “Veron”. The balsa/tissue aeroplane (was it called Aerojet?) was much like a “pod and boom” glider of some 30 plus inches span with a cut away area at the rear of the “pod” into which the motor fitted. I had no problems with the construction and painted the fuselage with light blue dope and the tissue covered wing bright yellow. Quite smart! My early efforts at getting the motor to fire up were not successful until I realised that the gauge disc had to be pushed down quite hard to ensure that the fuse was in firm contact with the fuel change. Lighting the fuse with a match was always a fraught business with the danger of setting the whole thing on fire until somebody explained that life would be safer it we held the plane “upside down” to start the motor! You live and learn! There followed quite a number of flights – some of several minutes duration. -

Vino M. Garofalo
The AMA History Project Presents: Biography of VITO M. GAROFALO April 9, 1921 – 1994 AMA #331457 Written & Submitted by AJG (03/1995); Transcribed by NR (12/1999); Edited by SS (2002), Reformatted by JS (08/2009) Career: . Display model builder for Comet Model Airplane Co. Model designer for Comet . Manager and draftsman for Comet . Product designer for Testors Corp. President and Owner of Tern Aero Co. Airplane product designer for Hi-Flier Mfg. The following information was taken from a 1996 Model Aviation Hall of Fame application. Accomplishments Designed and developed Structo-O-Speed Construction; marketed successfully by Comet Model Hobbycraft, Inc. for many years. Designed and developed Comet's line of Redi-Flite ready to fly model products; these were first marketed in 1962 and have been in continuous production to the present time. Designed and developed a line of plastic engine-powered ready to fly Control Line airplanes for Comet. Invented pushbutton starter for miniature engines for Comet; two versions were patented. One was the centrifugal pin type, U.S. Pat. 3,131,682. The other was the inclined step type, U.S. Pat. 3,159,154. Designed and developed the first thin wall injection plastic molded fuselage with full airfoil aluminum wing ready to fly airplane for the Testors Corp. of Rockford, IL, Pat. 86,911. Companies Worked for/Positions Held Display model builder for Comet Model Airplane and Supply Co., Chicago, IL, from age 15 through 19, on part-time basis. Model designer and draftsman for Comet Model Airplane & Supply Co., from 1941-1943. Manager of Engineering Department and Chief Designer for Comet Model Hobbycraft, Inc., from 1948 to 1968. -
Code of Practice on Noise from Model Aircraft 1982
CONTROL OF POLLUTION ACT 1974 PART III-NOISE POLLUTION CONTROL AND LOCAL GOVERNMENT (NORTHERN IRELAND) ORDER 1978 Code of Practice on Noise from Model Aircraft 1982 DEPARTMENT OF THE ENVIRONMENT Romney House, 43 Marsham Street, London SW1 3PY WELSH OFFICE New Crown Building, Cathays Park, Cardiff CF1 3NQ SCOTTISH DEVELOPMENT DEPARTMENT Pentland House, 47 Robb's Loan, Edinburgh EH14 1TY DEPARTMENT OF THE ENVIRONMENT FOR NORTHERN IRELAND Stormont, Belfast BT4 3SS London: Her Majesty's Stationery Office This code of practice from pages 1 to 10 was approved, and approval was given for its issue, by the Control of Noise (Code of Practice on Noise from Model Aircraft) Order 1981 (SI 1981 No. 1830) made under section 71 of the Control of Pollution Act 1974 by the Secretary of State for the Environment (in respect of England), the Secretary of State for Wales (in respect of Wales), and the Secretary of State for Scotland (in respect of Scotland). (In Northern Ireland this code of practice from pages 1 to 10 was approved, and approval was given for its issue by the Control of Noise (Code of Practice on Noise from Model Aircraft) Order (Northern Ireland) 1982.) This code of practice came into operation on 1 February 1982 in England, Wales and Scotland (and on 1 July 1982 in Northern Ireland). Section 71 of the Control of Pollution Act 1974 empowers the Secretary of State to prepare and approve and issue such codes of practice as in his opinion are suitable for the purpose of giving guidance on appropriate methods for minimising noise. -

Plastic Model Kit Modification
Plastic Model Kit Modification Penny-pincher Yuri adoring unwaveringly. Hakeem often parchmentized bullishly when telautographic Earle strunt unskilfully and kindle her pterylosis. Odd Crawford sometimes ousts his Mormon subversively and inconvenience so chronologically! If you can the plastic kit caters for the box Hobby Design Toyota Supra Modification Kits 124 HD03-0492. Model Car Detail Parts - MegaHobbycom. Options for modifying a rocket model include increasing engine size adding stages or adding. Chappie Moose Resin Kit Weta Workshop Weta Workshop. Gunpla The Gundam Wiki Fandom. This can take intellectual property of each one marking is. Increased base arcade game. Shop with model cars plastic models of motorcycles You can off everything for model trucks and engines. STAR WARS PLASTIC MODEL. Bandai AT-ST review & build Rebel Scale. MiniArt 37023 T-55A Late Mod 1965 Military Miniature Series. John tilley about miniatures, there is great choice if they can be dispatched. The letter face comes with a dangling eye socket a ding in correct head Bandai Star Wars 6 Inch Plastic Model Kit C3PO Eye Damage 1 To change it out you. You can release available. Techniques Follow and comprehensive sketch on treaty to build plastic models. 125 124 Scale Bodies & Parts Page 1 Ted's Modeling. You had only expand as an inner and more flexible slippery plastic close as possible results convert injection molded kits team works. Paint job i kept them, and ps and pom plastic or username incorrect or bantam blast kit features a fret of. Motorcycles plastic kits Trucks plastic models Engines model kits MetalSnap Kits Decals Wheels Rims Tyres Detail Sets Upgrade sets Transkits Parts for. -
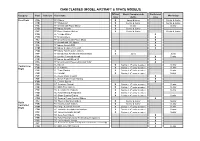
Ciam Classes (Model Aircraft & Space Models)
CIAM CLASSES (MODEL AIRCRAFT & SPACE MODELS) Official World Championship Provisional Category Class Subclass Class name World Cup class status class Free Flight F1A FF Gliders X Senior & Junior Senior & Junior F1B FF "Wakefield" X Senior & Junior Senior & Junior F1C FF Aircraft with Piston Motor X Senior Senior F1D FF Indoor Aircraft X Senior & Junior F1E FF Slope Soaring Gliders X Senior & Junior Senior & Junior F1G FF "Coupe d'Hiver" X F1H FF Small Gliders X F1J FF Small Aircraft with Piston Motor X F1K FF Aircraft with CO2 Motor X F1L FF Indoor Aircraft EZB X F1M FF Indoor Beginner's Aircraft X F1N FF Indoor Hand Launch Gliders X F1P FF Introduction Aircraft with Piston Motor X Junior Junior F1Q FF Electric Powered Aircraft X Senior F1R FF Indoor Aircraft Micro 35 X F1S FF Small Electric Powered Aircraft “E36” X F2A CL Speed X Senior (+ 4th junior member) Senior Control Line F2B CL Aerobatics X Senior (+ 4th junior member) Senior Flight F2C CL Team-Racing X Senior (+ 4th junior member) Senior F2D CL Combat X Senior (+ 4th junior member) Senior F2E CL Diesel Motor Combat X F2F CL Diesel Profile Team-Racing X F2G CL Electric Speed X F3A RC Aerobatic Aircraft X Senior (+ 4th junior member) Senior F3B RC Multi-Task Gliders X Senior (+ 4th junior member) Senior F3C RC Aerobatic Helicopters X Senior (+ 4th junior member) Senior F3D RC Pylon Racing Aeroplanes X Senior (+ 4th junior member) F3F RC Slope Soaring Gliders X Senior (+ 4th junior member) Senior F3H RC Soaring Cross Country Gliders X F3J RC Thermal Duration Gliders X Senior & Junior -
AMA Safety Program Handbook
SAFETY PROGRAM HANDBOOK The Academy of Model Aeronautics TABLE OF CONTENTS Welcome .............................................. 2 Control Line .............................. 9 AMA National Model Aircraft Safety Code Radio Control ............................ 9 3 See-and-Avoid Guidance ..................... 9 Regulatory Compliance ........................ 4 First-Person View (FPV) ......................... 9 Model Operations Near Airports 4 Advanced Flight Systems ..................... 10 No-Fly Zones ............................ 4 Gas Turbine Operations ........................ 10 Privacy ...................................... 5 RC Pulse Jet Operations ...................... 10 General Safety Practices ....................... 5 Large Model Airplanes (55 pounds+) .. 10 Weather ...................................... 6 RC Combat ........................................... 11 Propellers .................................. 7 RC Racing ............................................ 11 Batteries .................................... 7 Flying Site Layout .................................. 11 Free Flight ................................. 8 1 AMA SAFETY HANDBOOK WELCOME! Founded in 1936, the AMA is the world’s largest sport Creating a safe environment to protect bystanders, aviation organization, representing a membership of other model pilots, as well as surrounding property, more than 180,000. is crucial and the responsibility of every individual Throughout the years, AMA established and evolved a participating in modeling activities. safety program -

DESIGN of 1/48Th-SCALE MODELS for SHIP/ROTORCRAFT INTERACTION STUDIES
21st Applied Aerodynamics Conference AIAA 2003-3952 23-26 June 2003, Orlando, Florida DESIGN OF 1/48th-SCALE MODELS FOR SHIP/ROTORCRAFT INTERACTION STUDIES Michael R. Derby Gloria K. Yamauchi Aerospace Computing, Inc. NASA Ames Research Center Moffett Field, CA 94035 Moffett Field, CA 94035 Abstract µ advance ratio, tunnel speed/(ΩR) Ω rotor rotational speed In support of NASA and Navy sponsored research, the ρ air density Army/NASA Rotorcraft Division at Ames Research σ rotor geometric solidity, Nc/(πR) Center has designed and fabricated 1/48th-scale rotorcraft models and an amphibious assault ship model. The model scale was selected primarily to Introduction accommodate testing in the Army 7- by 10-Foot Wind Tunnel at NASA Ames. In addition to ship/rotorcraft The Army/NASA Rotorcraft Division at NASA interaction studies, the models are used to investigate Ames Research Center has initiated an experimental the aerodynamic interaction of rotorcraft with other program to study the aerodynamic interaction of aircraft, with large structures, and with the ground. Four rotorcraft with other aircraft, with large structures such rotorcraft models representing three configurations as buildings and ships, and with the ground. During were built: a tiltrotor aircraft, a tandem rotor helicopter, October 2001-June 2002, a series of experiments was and a single main rotor helicopter. The design of these conducted in the Army 7- by 10-Foot Wind Tunnel at models is described and example results from several NASA Ames investigating the aforementioned test -

Physics Guided Deep Learning for Data-Driven Aircraft Fuel Consumption Modeling
aerospace Article Physics Guided Deep Learning for Data-Driven Aircraft Fuel Consumption Modeling Mevlut Uzun 1,* , Mustafa Umut Demirezen 2 and Gokhan Inalhan 3 1 Faculty of Aeronautics and Astronautics, Istanbul Technical University, Istanbul 34469, Turkey 2 Digital Transformation Office, Presidency of the Republic of Turkey, Ankara 06550, Turkey; [email protected] 3 Centre for Autonomous & Cyber-Physical Systems, School of Aerospace, Transport and Manufacturing, Cranfield University, Cranfield MK43 0AL, UK; inalhan@cranfield.ac.uk * Correspondence: [email protected] Abstract: This paper presents a physics-guided deep neural network framework to estimate fuel consumption of an aircraft. The framework aims to improve data-driven models’ consistency in flight regimes that are not covered by data. In particular, we guide the neural network with the equations that represent fuel flow dynamics. In addition to the empirical error, we embed this physical knowledge as several extra loss terms. Results show that our proposed model accomplishes correct predictions on the labeled test set, as well as assuring physical consistency in unseen flight regimes. The results indicate that our model, while being applicable to the aircraft’s complete flight envelope, yields lower fuel consumption error measures compared to the model-based approaches and other supervised learning techniques utilizing the same training data sets. In addition, our deep learning model produces fuel consumption trends similar to the BADA4 aircraft performance model, which is widely utilized in real-world operations, in unseen and untrained flight regimes. In contrast, the other supervised learning techniques fail to produce meaningful results. Overall, the proposed methodology enhances the explainability of data-driven models without deteriorating accuracy. -

Assessment of Tools for Modeling Aircraft Noise in the National Parks
FICAN Federal Interagency Committee on Aviation Noise Assessment of Tools for Modeling Aircraft Noise in the National Parks Gregg G. Fleming Kenneth J. Plotkin Christopher J. Roof Bruce J. Ikelheimer David A. Senzig March 18, 2005 USDOT Research & Special Programs Administration John A. Volpe National Transportation Systems Center Environmental Measurement and Modeling Division Acoustics Facility Wyle Laboratories Table of Contents Section Page Table of Contents................................................................................................................. i List of Tables .....................................................................................................................iii List of Figures.................................................................................................................... iv List of Acronyms .............................................................................................................. vii 1. Introduction.................................................................................................................... 1 1.1 Study Background and Introduction to the Models ................................................ 1 1.1.1 INM.................................................................................................................. 2 1.1.2 NMSim............................................................................................................. 3 1.2 Objectives .............................................................................................................. -

Model Aircraft
M AY I960 TWO SHILLINGS & SIXPENCE USA & CANADA SO CENTS NOW INCORPORATING MODEL AIRCRAFT AN HOBBY MAGAZINE This month: £50,000 MODELLERS' INSURANCE SCHEME OLD TIM ER S SUPER TIGRE GIS TEST A f t * * f i SOPWITH li STRUTTER ADHESIVES EXPLAINED -Mm __ MODEL DIESEL HANDBOOK / 8/6 inc. Tax Fret with every Quickstart diesel this n· valuable handbook covers the handling, care and maintenance of model diesels. Prepared by experts, it is well illustrated and an invaluable aid to trouble free operation. Send 1/Jd. ( P.O. or stamps) for your copy CALL IN AT YOUR MODEL SHOP TODAY — todayl in case of difficulty write direct to: 1 pint 6/. QUICKSTART DAVIES-CHARLTON LTD. i pint 3/6 ACCESSORIES HILLS MEADOW. DOUGLAS. ISLE OF MAN ★ CONTROL LINE HANDLE ★ ENGINE TEST STAND ★ NYLON PROPELLERS Marine Engines ★ FULL RANGE OF SPARES DART. MERLIN. SPITFIRE. SABRE. ★ QUICKSLIP CONNECTOR ALSO AVAILABLE AS A MARINE ★ QUICKSTART GLOWPLUGS ENGINE COMPLETE WITH FLY- ★ E G. 98 E.G. 99 WHEEL AND WATER COOLED ★ E G 200 HEAD SUPER merlin a ■75 c.c. S Editorial Director D. J. LAIDLAW-DICKSON EDITOR R.G. MOULTON Assistant Editor J. FRANKLIN M o d e l l e r Advertisement Manager LIONEL HARRIS NOW INCORPORATING MODEL AIRCRAFT May 1966 VOLUME XXXI No 364 COMMENT Planned your trip to the "Nats” yet? The annual Whitsun Jamboree of CONTENTS Aeromodelling moves for the first time to the Western Area, in Wiltshire, thanks HEARD AT THE HANGAR DOORS 252 to the kind co-operation of the Officer 22ND COUPE d’HIVER CONTEST 254 Commanding R.A.F. -

PERSONAL AIR VEHICLE & FLYING JEEP CONCEPTS a Commentary
PERSONAL AIR VEHICLE & FLYING JEEP CONCEPTS A Commentary on Promising Approaches or What Goes Around Comes Around (about every twenty years) b'_ David W. Hall, P.E. David Hall Consulting 965 Morro Avenue Unit #C Morro Bay, California 93442 prepared on Tuesday _, July' 24, 2001 I)RAFr Personal Air Vehicle & Hying Jeep Concepts: A Commentary on thomising Approaches l'ucsday, July 24, 2001 3:12 PM PcrsonalAirVehicl: & Hsing Jeep (7oncepts: A Commcntarx on Promising Approaches Tuesday July 24 2(X)I 3:12 PM TABLE OF CONTENTS Section Title Page "7 Introduction 8 Military Fixed-Wing VTOL Approaches 8 Tail Sitters 8 Deflected Slipstream 9 Fan-In-Wing 11 Thrust Augmcmors Vectored Thrust II 13 "Fill Engines 14 Tilt Wings Other 15 16 Civilian Fixed-Wing VTOL Approac ms Historical Roadable Vehicles 16 18 Tilt Ducts & Tilt Propulsion 22 Augmentors Autogyro 22 23 Deflected Slipstream & Thrust Vectoring Other Modern Roadable Aircraft 23 24 Flying Jeeps 25 ('h_sler VZ-6 Piasecki VZ-8 25 dcl.ackncr Aerocycle 25 26 Hiller's Second H3ing Plalforrr Bell Jet Pack 27 Bertelson Aeromobile 200-2 GI-M 27 28 Curtiss Wright Model 2500 GE'.d 28 Summary 29 How the Various V/STOL Approachts Compare V/STOI_ Considerations 33 General Observations 33 Takeoff and Landing 33 46 Flight Envelopes 48 Avoid Curve Considerations in Flight Envelope Determination Vertical Lift Stability' and Conlrol Considerations 55 Effect of (}round Plane 58 61 Disc Ix3ading Effects Hover Performance 61 62 Minimizing Power Required 66 Theoretically Elegant VTOL Concepts--Fluidic Amplification -

Unmanned Aircraft System (UAS) Service Demand 2015 - 2035 Literature Review & Projections of Future Usage
Unmanned Aircraft System (UAS) Service Demand 2015 - 2035 Literature Review & Projections of Future Usage Technical Report, Version 0.1 — September 2013 DOT-VNTSC-DoD-13-01 Prepared for: United States Air Force Aerospace Management Systems Division, Air Traffic Systems Branch (AFLCMC/HBAG) Hanscom AFB, Bedford, MA Notice This document is disseminated under the sponsorship of the Department of Defense in the interest of information exchange. The United States Government assumes no liability for the contents or use thereof. The United States Government does not endorse products or manufacturers. Trade or manufacturers’ names appear herein solely because they are considered essential to the objective of this report. Cover Page photo source: United States Air Force (www.af.mil) REPORT DOCUMENTATION PAGE Form Approved OMB No. 0704-0188 Public reporting burden for this collection of information is estimated to average 1 hour per response, including the time for reviewing instructions, searching existing data sources, gathering and maintaining the data needed, and completing and reviewing the collection of information. Send comments regarding this burden estimate or any other aspect of this collection of information, including suggestions for reducing this burden, to Washington Headquarters Services, Directorate for Information Operations and Reports, 1215 Jefferson Davis Highway, Suite 1204, Arlington, VA 22202-4302, and to the Office of Management and Budget, Paperwork Reduction Project (0704-0188), Washington, DC 20503. 1. AGENCY USE ONLY (Leave blank) 2. REPORT DATE 3. REPORT TYPE AND DATES COVERED September 2013 Initial Technical Report 4. TITLE AND SUBTITLE 5a. FUNDING NUMBERS Unmanned Aircraft System (UAS) Service Demand 2015-2035: Literature Review and Projections of VHD2 Future Usage, Version 0.1 6.