Guidance for the Implementation of Fdm Precursors
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
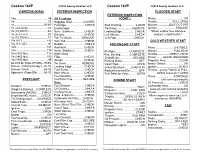
Cessna 182P ©2010 Axenty Aviation LLC Cessna 182P ©2010 Axenty Aviation LLC V SPEEDS (KIAS) EXTERIOR INSPECTION FLOODED START EXTERIOR INSPECTION Vso
Cessna 182P ©2010 Axenty Aviation LLC Cessna 182P ©2010 Axenty Aviation LLC V SPEEDS (KIAS) EXTERIOR INSPECTION FLOODED START EXTERIOR INSPECTION Vso..........................................48 Aft Fuselage (CONT.) Master....................................ON Vs............................................53 Baggage Door..............LOCKED Throttle....................FULL OPEN Vr.......................................50-60 Fuselage.........................CHECK Stall Warning...................CLEAR Mixture................IDLE CUT OFF Vx (sea level)..........................59 Empennage Tie Down.....................REMOVE Ignition.........................ENGAGE Vx (10,000 ft.).........................63 Horiz. Stabilizer..............CHECK Leading Edge.................CHECK *When engine fires advance Vy (sea level)..........................80 Elevator..........................CHECK Left Aileron.....................CHECK mixture, retard throttle* Vy (10,000 ft.).........................73 Tail Tie-Down..............REMOVE Left Flap........................CHECK Vfe (10°)................................140 Trim Tab.........................CHECK COLD WEATHER START Vfe (10°-40°)...........................95 Rudder............................CHECK PRE-ENGINE START Vno........................................141 Antennas........................CHECK Prime.........................6-8 TIMES Vne........................................176 Horiz. Stabilizer..............CHECK Preflight...................COMPLETE Mixture......................FULL RICH -

Arkansas Aviation Operation Plan Glossary of Terms A
Arkansas Aviation Operations –March 2014 Glossary of Terms Glossary v1.r1 Arkansas Aviation Operation Plan Glossary of Terms A ABORT To terminate a preplanned aircraft maneuver; e.g. an aborted takeoff 29 ADVISORY FREQUENCY The appropriate frequency to be used for Airport Advisory Service 29 AIR CARRIER A person who undertakes directly by lease, or other arrangement, to engage in air transportation.30 AIRCRAFT CATERGORY The term “category,” as used with respect to the certification of aircraft, means a grouping of aircraft based on their intended use or operating limitations, for example, normal, utility, acrobatic, or primary. For purposes of this order, gliders and balloons will be referred to as categories rather than classifications.30 AIR TRAFFIC Aircraft operating in the air or on an airport surface, exclusive of loading ramps and parking areas 29 AIR TRAFFIC CLEARANCE An authorization by air traffic control for the purpose of preventing collision between known aircraft, for an aircraft to proceed under specified traffic conditions within controlled airspace. The pilot-in-command of an aircraft may not deviate from the provisions of a visual flight rules (VFR) or instrument flight rules (IFR) air traffic clearance except in an emergency or unless an amended clearance has been obtained 29 AIR TRAFFIC CONTROL A service operated by appropriate authority to promote the safe, orderly and expeditious flow of air traffic 29 AIRPORT MARKING AID Markings used on runway and taxiway surfaces to identify a specific runway, a runway threshold, a centerline, a hold line, etc. A runway should be marked in accordance with its present usage such as: a. -

United Nations Aviation Standards for Peacekeeping and Humanitarian Air Transport Operations
UNITED NATIONS AVIATION STANDARDS FOR PEACEKEEPING AND HUMANITARIAN AIR TRANSPORT OPERATIONS (SEPTEMBER 2012) UNITED NATIONS AVIATION STANDARDS FOR PEACEKEEPING AND HUMANITARIAN AIR TRANSPORT OPERATIONS Table of Contents LIST OF EFFECTIVE PAGES SECTION 1: INTRODUCTION 1.1 Background 1.2 Applicability 1.3 Rules of Construction 1.4 Administration and Organization SECTION 2: DEFINITIONS SECTION 3: UN ORGANIZATION AND ADMINISTRATION OF AIR TRANSPORT OPERATIONS 3.1 Organization Structure 3.2 Personnel Requirements 3.3 Personnel Qualification Requirements for Air Transport Management 3.4 Personnel Qualification Requirements for Aviation Safety Management 3.5 Personnel Qualification Requirements for Aviation Quality Assurance Management 3.6 UN Call Signs 3.7 Insurance SECTION 4: AIRCRAFT OPERATOR REQUIREMENTS 4.1 Participation in UN Charter Contracts 4.2 Crew Member Training, Qualifications and Experience 4.3 Operational Control Functions 4.4 Flight Time, Flight Duty Periods and Rest Periods 4.5 The Air Operator Certificate 4.6 AOC Holder’s Operations Management 4.7 AOC Holder’s Maintenance Requirements 4.8 AOC Holder’s Security Management 4.9 Other Requirements 4.10 Crew Member Duties and Responsibilities 4.11 Flight Rules 4.12 Carriage of Passengers and Cargo — — — — — — — — (i) LIST OF EFFECTIVE PAGES Section Page Date Amended Section Page Date Amended by by 1 I‐1 September 2012 IV‐24 November 2007 I‐2 November 2007 2 II‐1 September 2012 II‐2 November 2007 II‐3 September 2012 II‐4 September 2012 II‐5 September 2012 II‐6 November 2007 3 III‐1 -

Gemini Series PFD
Gemini Series PFD Installation/User Manual 8300-083 Rev D Table of Contents Table of Contents ............................................................................................................................... 2 Document Revision Level & Notes ................................................................................................................ 4 Instrument Installation ................................................................................................................................... 5 Mounting Considerations................................................................................................................ 5 Wiring Considerations ..................................................................................................................... 5 Pitot and Static Connections .......................................................................................................... 5 RFI/EMI Considerations .................................................................................................................. 6 Getting Acquainted With Your Gemini PFD................................................................................................. 7 Gemini PFD Display........................................................................................................................... 7 Using the Touch Screen.................................................................................................................... 8 Info Page Display............................................................................................................................... -

Flight Deck Solutions, Technologies and Services Moving the Industry Forward Garmin Innovation Brings Full Integration to Business Flight Operations and Support
FLIGHT DECK SOLUTIONS, TECHNOLOGIES AND SERVICES MOVING THE INDUSTRY FORWARD GARMIN INNOVATION BRINGS FULL INTEGRATION TO BUSINESS FLIGHT OPERATIONS AND SUPPORT From web-based flight planning, fleet scheduling and tracking services to integrated flight display technology, head-up displays, advanced RNP navigation, onboard weather radar, Data Comm datalinks and much more — Garmin offers an unrivaled range of options to help make flying as smooth, safe, seamless and reliable as it can possibly be. Whether you operate a business jet, turboprop or hard-working helicopter, you can look to Garmin for industry-leading solutions scaled to fit your needs and your cockpit. The fact is, no other leading avionics manufacturer offers such breadth of capability — or such versatile configurability — in its lineup of flight deck solutions for aircraft manufacturers and aftermarket upgrades. When it comes to bringing out the best in your aircraft, Garmin innovation makes all the difference. CREATING A VIRTUAL REVOLUTION IN GLASS FLIGHT DECK SOLUTIONS By presenting key aircraft performance, navigation, weather, terrain routings and so on. The map function is designed to interface with a and traffic information, in context, on large high-resolution color variety of sensor inputs, so it’s easy to overlay weather, lightning, traffic, displays, today’s Garmin glass systems bring a whole new level of terrain, towers, powerlines and other avoidance system advisories, as clarity and simplicity to flight. The screens offer wide viewing angles, desired. These display inputs are selectable, allowing the pilot to add advanced backlighting and crystal-sharp readability, even in bright or deselect overlays to “build at will” the map view he or she prefers for sunlight. -

The Pennsylvania State University
The Pennsylvania State University The Graduate School Department of Aerospace Engineering REAL-TIME PATH PLANNING AND AUTONOMOUS CONTROL FOR HELICOPTER AUTOROTATION A Dissertation in Aerospace Engineering by Thanan Yomchinda 2013 Thanan Yomchinda Submitted in Partial Fulfillment of the Requirements for the Degree of Doctor of Philosophy May 2013 The dissertation of Thanan Yomchinda was reviewed and approved* by the following: Joseph F. Horn Associate Professor of Aerospace Engineering Dissertation Co-Advisor Co-Chair of Committee Jacob W. Langelaan Associate Professor of Aerospace Engineering Dissertation Co-Advisor Co-Chair of Committee Edward C. Smith Professor of Aerospace Engineering Christopher D. Rahn Professor of Mechanical Engineering George A. Lesieutre Professor of Aerospace Engineering Head of the Department of Aerospace Engineering *Signatures are on file in the Graduate School iii ABSTRACT Autorotation is a descending maneuver that can be used to recover helicopters in the event of total loss of engine power; however it is an extremely difficult and complex maneuver. The objective of this work is to develop a real-time system which provides full autonomous control for autorotation landing of helicopters. The work includes the development of an autorotation path planning method and integration of the path planner with a primary flight control system. The trajectory is divided into three parts: entry, descent and flare. Three different optimization algorithms are used to generate trajectories for each of these segments. The primary flight control is designed using a linear dynamic inversion control scheme, and a path following control law is developed to track the autorotation trajectories. Details of the path planning algorithm, trajectory following control law, and autonomous autorotation system implementation are presented. -

Cessna Model 150M Performance- Cessna Specifications Model 150M Performance - Specifications
PILOT'S OPERATING HANDBOOK ssna 1977 150 Commuter CESSNA MODEL 150M PERFORMANCE- CESSNA SPECIFICATIONS MODEL 150M PERFORMANCE - SPECIFICATIONS SPEED: Maximum at Sea Level 109 KNOTS Cruise, 75% Power at 7000 Ft 106 KNOTS CRUISE: Recommended Lean Mixture with fuel allowance for engine start, taxi, takeoff, climb and 45 minutes reserve at 45% power. 75% Power at 7000 Ft Range 340 NM 22.5 Gallons Usable Fuel Time 3.3 HRS 75% Power at 7000 Ft Range 580 NM 35 Gallons Usable Fuel Time 5. 5 HRS Maximum Range at 10,000 Ft Range 420 NM 22. 5 Gallons Usable Fuel Time 4.9 HRS Maximum Range at 10,000 Ft Range 735 NM 35 Gallons Usable Fuel Time 8. 5 HRS RATE OF CLIMB AT SEA LEVEL 670 FPM SERVICE CEILING 14, 000 FT TAKEOFF PERFORMANCE: Ground Roll 735 FT Total Distance Over 50-Ft Obstacle 1385 FT LANDING PERFORMANCE: Ground Roll 445 FT Total Distance Over 50-Ft Obstacle 107 5 FT STALL SPEED (CAS): Flaps Up, Power Off 48 KNOTS Flaps Down, Power Off 42 KNOTS MAXIMUM WEIGHT 1600 LBS STANDARD EMPTY WEIGHT: Commuter 1111 LBS Commuter II 1129 LBS MAXIMUM USEFUL LOAD: Commuter 489 LBS Commuter II 471 LBS BAGGAGE ALLOWANCE 120 LBS WING LOADING: Pounds/Sq Ft 10.0 POWER LOADING: Pounds/HP 16.0 FUEL CAPACITY: Total Standard Tanks 26 GAL. Long; Range Tanks 38 GAL. OIL CAPACITY 6 QTS ENGINE: Teledyne Continental O-200-A 100 BHP at 2750 RPM PROPELLER: Fixed Pitch, Diameter 69 IN. D1080-13-RPC-6,000-12/77 PILOT'S OPERATING HANDBOOK Cessna 150 COMMUTER 1977 MODEL 150M Serial No. -
(VL for Attrid
ECCAIRS Aviation 1.3.0.12 Data Definition Standard English Attribute Values ECCAIRS Aviation 1.3.0.12 VL for AttrID: 391 - Event Phases Powered Fixed-wing aircraft. (Powered Fixed-wing aircraft) 10000 This section covers flight phases specifically adopted for the operation of a powered fixed-wing aircraft. Standing. (Standing) 10100 The phase of flight prior to pushback or taxi, or after arrival, at the gate, ramp, or parking area, while the aircraft is stationary. Standing : Engine(s) Not Operating. (Standing : Engine(s) Not Operating) 10101 The phase of flight, while the aircraft is standing and during which no aircraft engine is running. Standing : Engine(s) Start-up. (Standing : Engine(s) Start-up) 10102 The phase of flight, while the aircraft is parked during which the first engine is started. Standing : Engine(s) Run-up. (Standing : Engine(s) Run-up) 990899 The phase of flight after start-up, during which power is applied to engines, for a pre-flight engine performance test. Standing : Engine(s) Operating. (Standing : Engine(s) Operating) 10103 The phase of flight following engine start-up, or after post-flight arrival at the destination. Standing : Engine(s) Shut Down. (Standing : Engine(s) Shut Down) 10104 Engine shutdown is from the start of the shutdown sequence until the engine(s) cease rotation. Standing : Other. (Standing : Other) 10198 An event involving any standing phase of flight other than one of the above. Taxi. (Taxi) 10200 The phase of flight in which movement of an aircraft on the surface of an aerodrome under its own power occurs, excluding take- off and landing. -

Rapport D'enquête
Parution : Décembre 2018 RAPPORT D’ENQUÊTE Incident grave survenu le 22 mai 2015 à Paris – Charles-de-Gaulle (95) au Boeing 777-F immatriculé F-GUOC exploité par Air France www.bea.aero @BEA_Aero Les enquêtes de sécurité Le BEA est l’autorité française d’enquêtes de sécurité de l’aviation civile. Ses enquêtes ont pour unique objectif l’amélioration de la sécurité aérienne et ne visent nullement la détermination des fautes ou responsabilités. Les enquêtes du BEA sont indépendantes, distinctes et sans préjudice de toute action judiciaire ou administrative visant à déterminer des fautes ou des responsabilités. 2 F-GUOC - 22 mai 2015 Table des matières LES ENQUÊTES DE SÉCURITÉ 2 SYNOPSIS 10 ORGANISATION DE L’ENQUETE 12 1 - RENSEIGNEMENTS DE BASE 13 1.1 Déroulement du vol 13 1.2 Tués et blessés 14 1.3 Dommages à l’aéronef 15 1.4 Autres dommages 15 1.5 Renseignements sur le personnel 15 1.5.1 Équipage de conduite 15 1.6 Renseignements sur l’aéronef 16 1.6.1 Cellule 16 1.6.2 Procédure d’insertion de données sur Boeing 777 (Air France) 16 1.6.3 Outil de calcul des performances (OPT) et procédures associées 20 1.6.4 Vitesses de référence calculées par le FMS 21 1.6.5 Message V SPEEDS UNAVAILABLE affiché au CDU du FMS 22 1.6.6 Optimisation de la configuration des volets au décollage 24 1.6.7 Procédure TAIL STRIKE 26 1.7 Renseignements météorologiques 26 1.8 Aides à la navigation 26 1.9 Télécommunications 26 1.10 Renseignements sur l’aérodrome 27 1.11 Enregistreurs de bord 27 1.12 Renseignements sur l’épave et sur l’impact 30 1.13 Renseignements -

GSW-8 Flight Instruments
GSW-8 Flight Instruments READING ASSIGNMENT PHAK Chapter 8 – Flight Instruments Study Questions 1. In addition to being able to read and interpret flight instruments, a pilot must also be able to a) build replacement flight instruments from spare parts. b) detect changes in altitude, airspeed, and heading using only body signals. c) recognize errors and malfunctions of these instruments during preflight inspection and in the air. Pitot-Static System 2. Impact air pressure is taken from the ___________________________________ , and ___________________________________ air pressure is usually taken from vents mounted flush with the fuselage. 3. A change in airspeed will affect the air pressure in which line of the pitot-static system? a) Static air pressure in the static line. b) Impact air pressure in the pitot line. c) Air pressure in both lines will change. 4. A change in altitude will affect the air pressure in which line of the pitot-static system? a) Static air pressure in the static line. b) Impact air pressure in the pitot line. GSW-8 c) Air pressure in both lines will change. 5. During preflight inspection, if a pilot notices a blocked or partially blocked static vent, how should it be ? resolved? a) The pilot should blow forcefully on the vent hole until the clog dislodges. b) A certificated mechanic should be notified so that he or she can remove the blockage. c) The clog will likely remove itself during slipping flight. 6. Which flight instrument uses impact pressure from the pitot line? ___________________________________________________________________________________ 7. Why do many planes have more than one static port? a) Multiple ports allow air pressure to equalize from one side of the airplane to the other. -
Operations Circular 3 of 2011
GOVERNMENT OF INDIA CIVIL AVIATION DEPARTMENT OFFICE OF DIRECTOR GENERAL OF CIVIL AVIATION NEW DELHI OPERATIONS CIRCULAR 3 OF 2011 AV. 22024/8/2010-FSD 21st April 2011 Subject: OPERATIONS OF AIRCRAFT AT ALTITUDES ABOVE 25,000 FEET MSL AND/OR MACH NUMBERS (MMO) GREATER THAN .75 1. PURPOSE. This circular is issued to guide pilots, particularly those who are transitioning from aircraft of lower performance capability to complex, high-performance aircraft that are capable of operating at high altitudes and high airspeeds. It is essential to have knowledge of the special physiological, engine and aerodynamic considerations involved in these operations. 2. BACKGROUND. A series of safety recommendations have required that, among other things, a minimum training curriculum be established for use at pilot schools covering pilots initial transition onto general aviation turbojet airplanes. Aerodynamics and physiological aspects of high-performance aircraft operating at high altitudes were among the subjects recommended for inclusion in this training curriculum. These recommendations were the result of a review of a series of fatal accidents which were believed to involve a lack of flightcrew knowledge and proficiency in general aviation turbojet airplanes capable of operating in a high-altitude environment. Although the near total destruction of physical evidence and the absence of installed flight recorders had prevented authorities to accurately determine the circumstances which led to these accidents, the concern that a lack of flightcrew knowledge and proficiency in the subject matter of this circular was involved in either the initial loss of control or the inability to regain control of the aircraft, or both. -

Ac 25-15 11/20/89
Advisory us. Departmenf of Tronsportafion Federal Aviation Circular Administration Subject: APPROVAL OF FLIGHT MANAGEMENT Date: 11/20/89 AC No: 25-15 SYSTEMS IN TRANSPORT CATEGORY Initiated by: ANM-110 Change: AIRPLANES 1. PURPOSE. This advisory circular (AC) provides guidance material for the airworthiness approval of flight management systems (FMS} in transport category airplanes. Like all AC material, this AC is not mandatory and does not constitute a regulation. It is issued for guidance purposes and to outline a method of compliance with the rules. In lieu of following this method without deviation, the applicant may elect to follow an alternate method, provided the alternate method is also found by the Federal Aviation Administration (FAA} to be an acceptable means of complying with the requirements of Part 25. Because the method of compliance presented in this AC is not mandatory, the terms II sha11" and "must II used herein apply on1y to an applicant who chooses to follow this particular method without deviation. 2. RELATED DOCUMENTS. a. Related Federal Aviation Regulations {FAR}. Portions of Part 25 and a portion of Part 121, as presently written, can be applied for the design, substantiation, and certification of FMS for transport category airplanes. Sections which prescribe requirements for these types of systems include: § 25.101 Performance: General. § 25 .103 Stalling speed. § 25.105 Takeoff. § 25.107 Takeoff speeds. § 25.109 Accelerate-stop distance. § 25.111 Takeoff path. § 25.113 Takeoff distance and takeoff run. § 25.115 Takeoff flight path. § 25.117 Climb: general. § 25.119 Landing climb: All-engines-operating. § 25.121 Climb: One-engine-inoperative.