Ac 25-15 11/20/89
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Pitot-Static System Blockage Effects on Airspeed Indicator
The Dramatic Effects of Pitot-Static System Blockages and Failures by Luiz Roberto Monteiro de Oliveira . Table of Contents I ‐ Introduction…………………………………………………………………………………………………………….1 II ‐ Pitot‐Static Instruments…………………………………………………………………………………………..3 III ‐ Blockage Scenarios – Description……………………………..…………………………………….…..…11 IV ‐ Examples of the Blockage Scenarios…………………..……………………………………………….…15 V ‐ Disclaimer………………………………………………………………………………………………………………50 VI ‐ References…………………………………………………………………………………………….…..……..……51 Please also review and understand the disclaimer found at the end of the article before applying the information contained herein. I - Introduction This article takes a comprehensive look into Pitot-static system blockages and failures. These typically affect the airspeed indicator (ASI), vertical speed indicator (VSI) and altimeter. They can also affect the autopilot auto-throttle and other equipment that relies on airspeed and altitude information. There have been several commercial flights, more recently Air France's flight 447, whose crash could have been due, in part, to Pitot-static system issues and pilot reaction. It is plausible that the pilot at the controls could have become confused with the erroneous instrument readings of the airspeed and have unknowingly flown the aircraft out of control resulting in the crash. The goal of this article is to help remove or reduce, through knowledge, the likelihood of at least this one link in the chain of problems that can lead to accidents. Table 1 below is provided to summarize -
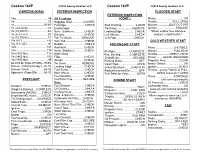
Cessna 182P ©2010 Axenty Aviation LLC Cessna 182P ©2010 Axenty Aviation LLC V SPEEDS (KIAS) EXTERIOR INSPECTION FLOODED START EXTERIOR INSPECTION Vso
Cessna 182P ©2010 Axenty Aviation LLC Cessna 182P ©2010 Axenty Aviation LLC V SPEEDS (KIAS) EXTERIOR INSPECTION FLOODED START EXTERIOR INSPECTION Vso..........................................48 Aft Fuselage (CONT.) Master....................................ON Vs............................................53 Baggage Door..............LOCKED Throttle....................FULL OPEN Vr.......................................50-60 Fuselage.........................CHECK Stall Warning...................CLEAR Mixture................IDLE CUT OFF Vx (sea level)..........................59 Empennage Tie Down.....................REMOVE Ignition.........................ENGAGE Vx (10,000 ft.).........................63 Horiz. Stabilizer..............CHECK Leading Edge.................CHECK *When engine fires advance Vy (sea level)..........................80 Elevator..........................CHECK Left Aileron.....................CHECK mixture, retard throttle* Vy (10,000 ft.).........................73 Tail Tie-Down..............REMOVE Left Flap........................CHECK Vfe (10°)................................140 Trim Tab.........................CHECK COLD WEATHER START Vfe (10°-40°)...........................95 Rudder............................CHECK PRE-ENGINE START Vno........................................141 Antennas........................CHECK Prime.........................6-8 TIMES Vne........................................176 Horiz. Stabilizer..............CHECK Preflight...................COMPLETE Mixture......................FULL RICH -
Airspeed Indicator Calibration
TECHNICAL GUIDANCE MATERIAL AIRSPEED INDICATOR CALIBRATION This document explains the process of calibration of the airspeed indicator to generate curves to convert indicated airspeed (IAS) to calibrated airspeed (CAS) and has been compiled as reference material only. i Technical Guidance Material BushCat NOSE-WHEEL AND TAIL-DRAGGER FITTED WITH ROTAX 912UL/ULS ENGINE APPROVED QRH PART NUMBER: BCTG-NT-001-000 AIRCRAFT TYPE: CHEETAH – BUSHCAT* DATE OF ISSUE: 18th JUNE 2018 *Refer to the POH for more information on aircraft type. ii For BushCat Nose Wheel and Tail Dragger LSA Issue Number: Date Published: Notable Changes: -001 18/09/2018 Original Section intentionally left blank. iii Table of Contents 1. BACKGROUND ..................................................................................................................... 1 2. DETERMINATION OF INSTRUMENT ERROR FOR YOUR ASI ................................................ 2 3. GENERATING THE IAS-CAS RELATIONSHIP FOR YOUR AIRCRAFT....................................... 5 4. CORRECT ALIGNMENT OF THE PITOT TUBE ....................................................................... 9 APPENDIX A – ASI INSTRUMENT ERROR SHEET ....................................................................... 11 Table of Figures Figure 1 Arrangement of instrument calibration system .......................................................... 3 Figure 2 IAS instrument error sample ........................................................................................ 7 Figure 3 Sample relationship between -

Sept. 12, 1950 W
Sept. 12, 1950 W. ANGST 2,522,337 MACH METER Filed Dec. 9, 1944 2 Sheets-Sheet. INVENTOR. M/2 2.7aar alwg,57. A77OAMA). Sept. 12, 1950 W. ANGST 2,522,337 MACH METER Filed Dec. 9, 1944 2. Sheets-Sheet 2 N 2 2 %/ NYSASSESSN S2,222,W N N22N \ As I, mtRumaIII-m- III It's EARAs i RNSITIE, 2 72/ INVENTOR, M247 aeawosz. "/m2.ATTORNEY. Patented Sept. 12, 1950 2,522,337 UNITED STATES ; :PATENT OFFICE 2,522,337 MACH METER Walter Angst, Manhasset, N. Y., assignor to Square D Company, Detroit, Mich., a corpora tion of Michigan Application December 9, 1944, Serial No. 567,431 3 Claims. (Cl. 73-182). is 2 This invention relates to a Mach meter for air plurality of posts 8. Upon one of the posts 8 are craft for indicating the ratio of the true airspeed mounted a pair of serially connected aneroid cap of the craft to the speed of sound in the medium sules 9 and upon another of the posts 8 is in which the aircraft is traveling and the object mounted a diaphragm capsuler it. The aneroid of the invention is the provision of an instrument s: capsules 9 are sealed and the interior of the cas-l of this type for indicating the Mach number of an . ing is placed in communication with the static aircraft in fight. opening of a Pitot static tube through an opening The maximum safe Mach number of any air in the casing, not shown. The interior of the dia craft is the value of the ratio of true airspeed to phragm capsule is connected through the tub the speed of sound at which the laminar flow of ing 2 to the Pitot or pressure opening of the Pitot air over the wings fails and shock Waves are en static tube through the opening 3 in the back countered. -

E6bmanual2016.Pdf
® Electronic Flight Computer SPORTY’S E6B ELECTRONIC FLIGHT COMPUTER Sporty’s E6B Flight Computer is designed to perform 24 aviation functions and 20 standard conversions, and includes timer and clock functions. We hope that you enjoy your E6B Flight Computer. Its use has been made easy through direct path menu selection and calculation prompting. As you will soon learn, Sporty’s E6B is one of the most useful and versatile of all aviation computers. Copyright © 2016 by Sportsman’s Market, Inc. Version 13.16A page: 1 CONTENTS BEFORE USING YOUR E6B ...................................................... 3 DISPLAY SCREEN .................................................................... 4 PROMPTS AND LABELS ........................................................... 5 SPECIAL FUNCTION KEYS ....................................................... 7 FUNCTION MENU KEYS ........................................................... 8 ARITHMETIC FUNCTIONS ........................................................ 9 AVIATION FUNCTIONS ............................................................. 9 CONVERSIONS ....................................................................... 10 CLOCK FUNCTION .................................................................. 12 ADDING AND SUBTRACTING TIME ....................................... 13 TIMER FUNCTION ................................................................... 14 HEADING AND GROUND SPEED ........................................... 15 PRESSURE AND DENSITY ALTITUDE ................................... -

The Difference Between Higher and Lower Flap Setting Configurations May Seem Small, but at Today's Fuel Prices the Savings Can Be Substantial
THE DIFFERENCE BETWEEN HIGHER AND LOWER FLAP SETTING CONFIGURATIONS MAY SEEM SMALL, BUT AT TODAY'S FUEL PRICES THE SAVINGS CAN BE SUBSTANTIAL. 24 AERO QUARTERLY QTR_04 | 08 Fuel Conservation Strategies: Takeoff and Climb By William Roberson, Senior Safety Pilot, Flight Operations; and James A. Johns, Flight Operations Engineer, Flight Operations Engineering This article is the third in a series exploring fuel conservation strategies. Every takeoff is an opportunity to save fuel. If each takeoff and climb is performed efficiently, an airline can realize significant savings over time. But what constitutes an efficient takeoff? How should a climb be executed for maximum fuel savings? The most efficient flights actually begin long before the airplane is cleared for takeoff. This article discusses strategies for fuel savings But times have clearly changed. Jet fuel prices fuel burn from brake release to a pressure altitude during the takeoff and climb phases of flight. have increased over five times from 1990 to 2008. of 10,000 feet (3,048 meters), assuming an accel Subse quent articles in this series will deal with At this time, fuel is about 40 percent of a typical eration altitude of 3,000 feet (914 meters) above the descent, approach, and landing phases of airline’s total operating cost. As a result, airlines ground level (AGL). In all cases, however, the flap flight, as well as auxiliarypowerunit usage are reviewing all phases of flight to determine how setting must be appropriate for the situation to strategies. The first article in this series, “Cost fuel burn savings can be gained in each phase ensure airplane safety. -

Guidance for the Implementation of Fdm Precursors
EUROPEAN OPERATORS FLIGHT DATA MONITORING WORKING GROUP B SAFETY PROMOTION Good Practice document GUIDANCE FOR THE IMPLEMENTATION OF FDM PRECURSORS June 2019 Rev 02 Guidance for the Implementation of FDM Precursors | Rev 02 Contents Table of Revisions .............................................................................................................................5 Introduction ......................................................................................................................................6 Occurrence Reporting and FDM interaction ............................................................................................ 6 Precursor Description ................................................................................................................................ 6 Methodology for Flight Data Monitoring ................................................................................................. 9 Runway Excursions (RE) ..................................................................................................................11 RE01 – Incorrect Performance Calculation ............................................................................................. 12 RE02 – Inappropriate Aircraft Configuration .......................................................................................... 14 RE03 – Monitor CG Position .................................................................................................................... 16 RE04 – Reduced Elevator Authority ....................................................................................................... -

FAA Advisory Circular AC 91-74B
U.S. Department Advisory of Transportation Federal Aviation Administration Circular Subject: Pilot Guide: Flight in Icing Conditions Date:10/8/15 AC No: 91-74B Initiated by: AFS-800 Change: This advisory circular (AC) contains updated and additional information for the pilots of airplanes under Title 14 of the Code of Federal Regulations (14 CFR) parts 91, 121, 125, and 135. The purpose of this AC is to provide pilots with a convenient reference guide on the principal factors related to flight in icing conditions and the location of additional information in related publications. As a result of these updates and consolidating of information, AC 91-74A, Pilot Guide: Flight in Icing Conditions, dated December 31, 2007, and AC 91-51A, Effect of Icing on Aircraft Control and Airplane Deice and Anti-Ice Systems, dated July 19, 1996, are cancelled. This AC does not authorize deviations from established company procedures or regulatory requirements. John Barbagallo Deputy Director, Flight Standards Service 10/8/15 AC 91-74B CONTENTS Paragraph Page CHAPTER 1. INTRODUCTION 1-1. Purpose ..............................................................................................................................1 1-2. Cancellation ......................................................................................................................1 1-3. Definitions.........................................................................................................................1 1-4. Discussion .........................................................................................................................6 -

PROPULSION SYSTEM/FLIGHT CONTROL INTEGRATION for SUPERSONIC AIRCRAFT Paul J
PROPULSION SYSTEM/FLIGHT CONTROL INTEGRATION FOR SUPERSONIC AIRCRAFT Paul J. Reukauf and Frank W. Burcham , Jr. NASA Dryden Flight Research Center SUMMARY The NASA Dryden Flight Research Center is engaged in several programs to study digital integrated control systems. Such systems allow minimization of undesirable interactions while maximizing performance at all flight conditions. One such program is the YF-12 cooperative control program. In this program, the existing analog air-data computer, autothrottle, autopilot, and inlet control systems are to be converted to digital systems by using a general purpose airborne computer and interface unit. First, the existing control laws are to be programed and tested in flight. Then, integrated control laws, derived using accurate mathematical models of the airplane and propulsion system in conjunction with modern control techniques, are to be tested in flight. Analysis indicates that an integrated autothrottle-autopilot gives good flight path control and that observers can be used to replace failed sensors. INTRODUCTION Supersonic airplanes, such as the XB-70, YF-12, F-111, and F-15 airplanes, exhibit strong interactions between the engine and the inlet or between the propul- sion system and the airframe (refs. 1 and 2) . Taking advantage of possible favor- able interactions and eliminating or minimizing unfavorable interactions is a chal- lenging control problem with the potential for significant improvements in fuel consumption, range, and performance. In the past, engine, inlet, and flight control systems were usually developed separately, with a minimum of integration. It has often been possible to optimize the controls for a single design point, but off-design control performance usually suffered. -

GENERAL ENGINE BLEED Fokker 50
Fokker 50 - Bleed Air System GENERAL Bleed-air is used for airconditioning, pressurization, airframe and engine air intake de-icing, and for pressurizing the hydraulic tank. Bleed-air is supplied by the engines. For aircraft equipped with APU On the ground bleed-air can be supplied by the APU for air conditioning. ENGINE BLEED Tappings Bleed-air is obtained via tappings on each engine, referred to as Low-Pressure (LP) bleed and High-Pressure (HP) bleed. LP-bleed is normally in use during flight. HP-bleed will be used at idling and low engine speeds, when LP-bleed is insufficient. The HP-bleed valve will open automatically provided the BLEED push button, located at the AIR CONDITIONING panel, is blank. Bleed-air from the HP-Bleed is prevented from flowing into the LP-bleed by a check valve. Duct leak detection A duct leak between the engine tappings and the firewall, resulting in a significant leakage of bleed-air, is monitored by the engine fire detection and warning system. Distribution Bleed-air from both engines is used to supply the following services: • Airframe, and engine air intake de-icing, see ICE AND RAIN PROTECTION • Hydraulic tank pressurization, see HYDRAULIC SYSTEM. • Airconditioning and pressurization, see below. • If mentioned in aircraft system deviation table: Watertank pressurization, see AIRCRAFT GENERAL. Page 1 Fokker 50 - Bleed Air System BLEED AIR FOR AIRCONDITIONING Supply Controls and indicators are located at the AIRCONDITIONING panel. Bleed-air is available when the engines are running and the BLEED push buttons are blank. When a BLEED push button is depressed to OFF, the Pressure Regulating/Shut-Off valve (PR/SO) and the HP- bleed valve close. -

Using an Autothrottle to Compare Techniques for Saving Fuel on A
Iowa State University Capstones, Theses and Graduate Theses and Dissertations Dissertations 2010 Using an autothrottle ot compare techniques for saving fuel on a regional jet aircraft Rebecca Marie Johnson Iowa State University Follow this and additional works at: https://lib.dr.iastate.edu/etd Part of the Electrical and Computer Engineering Commons Recommended Citation Johnson, Rebecca Marie, "Using an autothrottle ot compare techniques for saving fuel on a regional jet aircraft" (2010). Graduate Theses and Dissertations. 11358. https://lib.dr.iastate.edu/etd/11358 This Thesis is brought to you for free and open access by the Iowa State University Capstones, Theses and Dissertations at Iowa State University Digital Repository. It has been accepted for inclusion in Graduate Theses and Dissertations by an authorized administrator of Iowa State University Digital Repository. For more information, please contact [email protected]. Using an autothrottle to compare techniques for saving fuel on A regional jet aircraft by Rebecca Marie Johnson A thesis submitted to the graduate faculty in partial fulfillment of the requirements for the degree of MASTER OF SCIENCE Major: Electrical Engineering Program of Study Committee: Umesh Vaidya, Major Professor Qingze Zou Baskar Ganapathayasubramanian Iowa State University Ames, Iowa 2010 Copyright c Rebecca Marie Johnson, 2010. All rights reserved. ii DEDICATION I gratefully acknowledge everyone who contributed to the successful completion of this research. Bill Piche, my supervisor at Rockwell Collins, was supportive from day one, as were many of my colleagues. I also appreciate the efforts of my thesis committee, Drs. Umesh Vaidya, Qingze Zou, and Baskar Ganapathayasubramanian. I would also like to thank Dr. -

Self-Actuating Flaps on Bird and Aircraft Wings 437
Self-actuating flaps on bird and aircraft wings D.W. Bechert, W. Hage & R. Meyer Department of Turbulence Research, German Aerospace Center (DLR), Berlin, Germany. Abstract Separation control is also an important issue in biology. During the landing approach of birds and in flight through very turbulent air, one observes that the covering feathers on the upper side of bird wings tend to pop up. The raised feathers impede the spreading of the flow separation from the trailing edge to the leading edge of the wing. This mechanism of separation control by bird feathers is described in detail. Self-activated movable flaps (= artificial bird feathers) represent a high-lift system enhancing the maximum lift of airfoils up to 20%. This is achieved without perceivable deleterious effects under cruise conditions. Several data of wind tunnel experiments as well as flight experiments with an aircraft with laminar wing and movable flaps are shown. 1 Movable flaps on wings: artificial bird feathers The issue of artificial feathers on wings, has an almost anecdotal origin. Wolfgang Liebe, the inventor of the boundary layer fence once observed mountain crows in the Alps in the 1930s. He noticed that the covering feathers on the upper side of the wings tend to pop up when the birds were on landing approach or in other situations with high angle of attack, like flight through gusts. Once the attention of the observer is drawn to it, it is comparatively easy to observe this behaviour in almost any bird (see, for example, the feathers on the left-hand wing of a Skua in Fig.