Large-Scale Optimization for Evaluation Functions with Minimax Search
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

California State University, Northridge Implementing
CALIFORNIA STATE UNIVERSITY, NORTHRIDGE IMPLEMENTING GAME-TREE SEARCHING STRATEGIES TO THE GAME OF HASAMI SHOGI A graduate project submitted in partial fulfillment of the requirements for the degree of Master of Science in Computer Science By Pallavi Gulati December 2012 The graduate project of Pallavi Gulati is approved by: ______________________________ ______________________________ Peter N Gabrovsky, Ph.D Date ______________________________ ______________________________ John J Noga, Ph.D Date ______________________________ ______________________________ Richard J Lorentz, Ph.D, Chair Date California State University, Northridge ii ACKNOWLEDGEMENTS I would like to acknowledge the guidance provided by and the immense patience of Prof. Richard Lorentz throughout this project. His continued help and advice made it possible for me to successfully complete this project. iii TABLE OF CONTENTS SIGNATURE PAGE .......................................................................................................ii ACKNOWLEDGEMENTS ........................................................................................... iii LIST OF TABLES .......................................................................................................... v LIST OF FIGURES ........................................................................................................ vi 1 INTRODUCTION.................................................................................................... 1 1.1 The Game of Hasami Shogi .............................................................................. -
Grid Computing for Artificial Intelligence
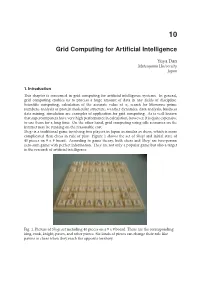
0 10 Grid Computing for Artificial Intelligence Yuya Dan Matsuyama University Japan 1. Introduction This chapter is concerned in grid computing for artificial intelligence systems. In general, grid computing enables us to process a huge amount of data in any fields of discipline. Scientific computing, calculation of the accurate value of π, search for Mersenne prime numbers, analysis of protein molecular structure, weather dynamics, data analysis, business data mining, simulation are examples of application for grid computing. As is well known that supercomputers have very high performance in calculation, however, it is quite expensive to use them for a long time. On the other hand, grid computing using idle resources on the Internet may be running on the reasonable cost. Shogi is a traditional game involving two players in Japan as similar as chess, which is more complicated than chess in rule of play. Figure 1 shows the set of Shogi and initial state of 40 pieces on 9 x 9 board. According to game theory, both chess and Shogi are two-person zero-sum game with perfect information. They are not only a popular game but also a target in the research of artificial intelligence. Fig. 1. Picture of Shogi set including 40 pieces ona9x9board. There are the corresponding king, rook, knight, pawn, and other pieces. Six kinds of pieces can change their role like pawns in chess when they reach the opposite territory. 202 Advances in Grid Computing The information systems for Shogi need to process astronomical combinations of possible positions to move. It is described by Dan (4) that the grid systems for Shogi is effective in reduction of computational complexity with collaboration from computational resources on the Internet. -

GO WINDS Play Over 1000 Professional Games to Reach Recent Sets Have Focused on "How the Pros 1-Dan, It Is Said
NEW FROM YUTOPIAN ENTERPRISES GO GAMES ON DISK (GOGoD) SOFTWARE GO WINDS Play over 1000 professional games to reach Recent sets have focused on "How the pros 1-dan, it is said. How about 6-dan? Games of play the ...". So far there are sets covering the Go on Disk now offers over 6000 professional "Chinese Fuseki" Volume I (a second volume Volume 2 Number 4 Winter 1999 $3.00 games on disk, games that span the gamut of is in preparation), and "Nirensei", Volumes I go history - featuring players that helped and II. A "Sanrensei" volume is also in define the history. preparation. All these disks typically contain All game collections come with DOS or 300 games. Windows 95 viewing software, and most The latest addition to this series is a collections include the celebrated Go Scorer in "specialty" item - so special GoGoD invented which you can guess the pros' moves as you a new term for it. It is the "Sideways Chinese" play (with hints if necessary) and check your fuseki, which incorporates the Mini-Chinese score. pattern. Very rarely seen in western The star of the collection may well be "Go publications yet played by most of the top Seigen" - the lifetime games (over 800) of pros, this opening is illustrated by over 130 perhaps the century's greatest player, with games from Japan, China and Korea. Over more than 10% commented. "Kitani" 1000 half have brief comments. The next specialty makes an ideal matching set - most of the item in preparation is a set of games featuring lifetime games of his legendary rival, Kitani unusual fusekis - this will include rare New Minoru. -

Shogi Yearbook 2015
Shogi Yearbook 2015 SHOGI24.COM SHOGI YEARBOOK 2015 Title match games, Challenger’s tournaments, interviews with WATANABE Akira and HIROSE Akihito, tournament reports, photos, Micro Shogi, statistics, … This yearbook is a free PDF document Shogi Yearbook 2015 Content Content Content .................................................................................................................................................... 2 Just a few words ... .................................................................................................................................. 5 64. Osho .................................................................................................................................................. 6 64. Osho league ................................................................................................................................... 6 64th Osho title match ........................................................................................................................... 9 Game 1 ............................................................................................................................................. 9 Game 2 ........................................................................................................................................... 12 Game 3 ........................................................................................................................................... 15 Game 4 .......................................................................................................................................... -

Vanguard FTSE International Index Funds Annual
Annual Report | October 31, 2020 Vanguard FTSE International Index Funds Vanguard FTSE All-World ex-US Index Fund Vanguard FTSE All-World ex-US Small-Cap Index Fund See the inside front cover for important information about access to your fund’s annual and semiannual shareholder reports. Important information about access to shareholder reports Beginning on January 1, 2021, as permitted by regulations adopted by the Securities and Exchange Commission, paper copies of your fund’s annual and semiannual shareholder reports will no longer be sent to you by mail, unless you specifically request them. Instead, you will be notified by mail each time a report is posted on the website and will be provided with a link to access the report. If you have already elected to receive shareholder reports electronically, you will not be affected by this change and do not need to take any action. You may elect to receive shareholder reports and other communications from the fund electronically by contacting your financial intermediary (such as a broker-dealer or bank) or, if you invest directly with the fund, by calling Vanguard at one of the phone numbers on the back cover of this report or by logging on to vanguard.com. You may elect to receive paper copies of all future shareholder reports free of charge. If you invest through a financial intermediary, you can contact the intermediary to request that you continue to receive paper copies. If you invest directly with the fund, you can call Vanguard at one of the phone numbers on the back cover of this report or log on to vanguard.com. -

Go Books Detail
Evanston Go Club Ian Feldman Lending Library A Compendium of Trick Plays Nihon Ki-in In this unique anthology, the reader will find the subject of trick plays in the game of go dealt with in a thorough manner. Practically anything one could wish to know about the subject is examined from multiple perpectives in this remarkable volume. Vital points in common patterns, skillful finesse (tesuji) and ordinary matters of good technique are discussed, as well as the pitfalls that are concealed in seemingly innocuous positions. This is a gem of a handbook that belongs on the bookshelf of every go player. Chapter 1 was written by Ishida Yoshio, former Meijin-Honinbo, who intimates that if "joseki can be said to be the highway, trick plays may be called a back alley. When one masters the alleyways, one is on course to master joseki." Thirty-five model trick plays are presented in this chapter, #204 and exhaustively analyzed in the style of a dictionary. Kageyama Toshiro 7 dan, one of the most popular go writers, examines the subject in Chapter 2 from the standpoint of full board strategy. Chapter 3 is written by Mihori Sho, who collaborated with Sakata Eio to produce Killer of Go. Anecdotes from the history of go, famous sayings by Sun Tzu on the Art of Warfare and contemporary examples of trickery are woven together to produce an entertaining dialogue. The final chapter presents twenty-five problems for the reader to solve, using the knowledge gained in the preceding sections. Do not be surprised to find unexpected booby traps lurking here also. -

Including ACG8, ACG9, Games in AI Research, ACG10 T/M P. 18) Version: 20 June 2007
REFERENCE DATABASE 1 Updated till Vol. 29. No. 2 (including ACG8, ACG9, Games in AI Research, ACG10 t/m p. 18) Version: 20 June 2007 AAAI (1988). Proceedings of the AAAI Spring Symposium: Computer Game Playing. AAAI Press. Abramson, B. (1990). Expected-outcome: a general model of static evaluation. IEEE Transactions on Pattern Analysis and Machine Intelligence, Vol. 12, No.2, pp. 182-193. ACF (1990), American Checkers Federation. http://www.acfcheckers.com/. Adelson-Velskiy, G.M., Arlazarov, V.L., Bitman, A.R., Zhivotovsky, A.A., and Uskov, A.V. (1970). Programming a Computer to Play Chess. Russian Mathematical Surveys, Vol. 25, pp. 221-262. Adelson-Velskiy, M., Arlazarov, V.L., and Donskoy, M.V. (1975). Some Methods of Controlling the Tree Search in Chess Programs. Artificial Ingelligence, Vol. 6, No. 4, pp. 361-371. ISSN 0004-3702. Adelson-Velskiy, G.M., Arlazarov, V. and Donskoy, M. (1977). On the Structure of an Important Class of Exhaustive Problems and Methods of Search Reduction for them. Advances in Computer Chess 1 (ed. M.R.B. Clarke), pp. 1-6. Edinburgh University Press, Edinburgh. ISBN 0-85224-292-1. Adelson-Velskiy, G.M., Arlazarov, V.L. and Donskoy, M.V. (1988). Algorithms for Games. Springer-Verlag, New York, NY. ISBN 3-540-96629-3. Adleman, L. (1994). Molecular Computation of Solutions to Combinatorial Problems. Science, Vol. 266. p. 1021. American Association for the Advancement of Science, Washington. ISSN 0036-8075. Ahlswede, R. and Wegener, I. (1979). Suchprobleme. Teubner-Verlag, Stuttgart. Aichholzer, O., Aurenhammer, F., and Werner, T. (2002). Algorithmic Fun: Abalone. Technical report, Institut for Theoretical Computer Science, Graz University of Technology. -

Honinbo Shusai 9P Black: Go Seigen 5P Result
The Game of the Century 9 1933-10-16 1 Tokyo, Japan 2 6 7 White: Honinbo Shusai 9p 8 Black: Go Seigen 5p Result: W+2 Diagram 1: 1-11 This match was sponsored by 5 Yomiuri Newspaper. In the preliminary game, Go Seigen defeated the strong opponents Kitani Minoru 6p and Hashimoto Utaro 5p, thus earned the right to play this memorable game with Honinbo Shusai Meijin who hadn't played any 10 game for almost ten years. This game started in Oct. 1933 and didn't finish until Feb. of next year, during 3 11 the process the game was adjourned for more than 10 times, and it c b a 4 created a furore in this Newspaper and at that time it was also regarded as the game of the century. In the recent Go world, we never saw a game which had produced such a great impact. 1: At that time, Go Seigen was just 20 years' old, in this match with Shusai Meijin, he started with the unprecedented opening of 3-3, star and tengen, which shocked the Go world. This special play was once criticized by some people: this is not polite to Meijin. As for today, this kind of criticism is just worth laughing. However, Mr. Go always holds firmly to his play, because Mr. Go just wanted to break away from all Shusaku's openings of 1, 3 and 5 and establish his own style, which is the "New Fuseki" he invented together with Kitani Minoru, so this game had another special meaning, it was a historical game between the new and old opening. -

Improving Alphazero Using Monte-Carlo Graph Search
Proceedings of the Thirty-First International Conference on Automated Planning and Scheduling (ICAPS 2021) Improving AlphaZero Using Monte-Carlo Graph Search Johannes Czech1, Patrick Korus1, Kristian Kersting1, 2, 3 1 Department of Computer Science, TU Darmstadt, Germany 2 Centre for Cognitive Science, TU Darmstadt, Germany 3 Hessian Center for Artificial Intelligence (hessian.AI), Darmstadt, Germany [email protected], [email protected], [email protected] Abstract A 8 AlphaZero The algorithm has been successfully applied in a 7 range of discrete domains, most notably board games. It uti- lizes a neural network that learns a value and policy func- 6 tion to guide the exploration in a Monte-Carlo Tree Search. Although many search improvements such as graph search 5 have been proposed for Monte-Carlo Tree Search in the past, 4 most of them refer to an older variant of the Upper Confi- dence bounds for Trees algorithm that does not use a pol- 3 icy for planning. We improve the search algorithm for Alp- 2 haZero by generalizing the search tree to a directed acyclic graph. This enables information flow across different sub- 1 trees and greatly reduces memory consumption. Along with a b c d e f g h Monte-Carlo Graph Search, we propose a number of further extensions, such as the inclusion of -greedy exploration, a B C revised terminal solver and the integration of domain knowl- edge as constraints. In our empirical evaluations, we use the e4 Nf3 e4 Nf3 CrazyAra engine on chess and crazyhouse as examples to Nc6 Nc6 show that these changes bring significant improvements to e5 Nc6 e5 Nc6 e5 e5 AlphaZero. -

A General Reinforcement Learning Algorithm That Masters Chess, Shogi and Go Through Self-Play
A general reinforcement learning algorithm that masters chess, shogi and Go through self-play David Silver,1;2∗ Thomas Hubert,1∗ Julian Schrittwieser,1∗ Ioannis Antonoglou,1;2 Matthew Lai,1 Arthur Guez,1 Marc Lanctot,1 Laurent Sifre,1 Dharshan Kumaran,1;2 Thore Graepel,1;2 Timothy Lillicrap,1 Karen Simonyan,1 Demis Hassabis1 1DeepMind, 6 Pancras Square, London N1C 4AG. 2University College London, Gower Street, London WC1E 6BT. ∗These authors contributed equally to this work. Abstract The game of chess is the longest-studied domain in the history of artificial intelligence. The strongest programs are based on a combination of sophisticated search techniques, domain-specific adaptations, and handcrafted evaluation functions that have been refined by human experts over several decades. By contrast, the AlphaGo Zero program recently achieved superhuman performance in the game of Go by reinforcement learning from self- play. In this paper, we generalize this approach into a single AlphaZero algorithm that can achieve superhuman performance in many challenging games. Starting from random play and given no domain knowledge except the game rules, AlphaZero convincingly defeated a world champion program in the games of chess and shogi (Japanese chess) as well as Go. The study of computer chess is as old as computer science itself. Charles Babbage, Alan Turing, Claude Shannon, and John von Neumann devised hardware, algorithms and theory to analyse and play the game of chess. Chess subsequently became a grand challenge task for a generation of artificial intelligence researchers, culminating in high-performance computer chess programs that play at a super-human level (1,2). -

Computer Shogi 2000 Through 2004
View metadata, citation and similar papers at core.ac.uk brought to you by CORE provided by DSpace at Waseda University 195 Computer Shogi 2000 through 2004 Takenobu Takizawa Since the first computer shogi program was developed by the author in 1974, thirty years has passed. During that time,shogi programming has attracted both researchers and commercial programmers and playing strength has improved steadily. Currently, the best programs have a level that is comparable to that of a very strong amateur player (about 5-dan). In the near future, a good program will beat a professional player. The basic structure of strong shogi programs is similar to that of chess programs. However, the differences between chess and shogi have led to the development of some shogi-specific methods. In this paper the author will give an overview of the history of computer shogi, summarize the most successful techniques and give some ideas for future directions of research in computer shogi. 1 . Introduction Shogi, or Japanese chess, is a two-player complete information game similar to chess. As in chess, the goal of the game is to capture the opponent’s king. However, there are a number of differences be- tween chess and shogi: the shogi board is slightly bigger than the chess board (9x9 instead of 8x8), there are different pieces that are relatively weak compared to the pieces in chess (no queens, but gold generals, sil- ver generals and lances) and the number of pieces in shogi is larger (40 instead of 32). But the most important difference between chess and shogi is the possibility to re-use captured pieces. -
Computer Games Workshop 2007
Computer Games Workshop 2007 Amsterdam, June 15{17, 2007 MAIN SPONSORS Preface We are pleased to present the proceedings of the Computer Games Workshop 2007, Amsterdam, June 15{17, 2007. This workshop will be held in conjunc- tion with the 12th Computer Olympiad and the 15th World Computer-Chess Championship. Although the announcement was quite late, we were pleased to receive no less than 24 contributions. After a \light" refereeing process 22 papers were accepted. We believe that they present a nice overview of state-of-the-art research in the ¯eld of computer games. The 22 accepted papers can be categorized into ¯ve groups, according to the type of games used. Chess and Chess-like Games In this group we have included two papers on Chess, one on Kriegspiel, and three on Shogi (Japanese Chess). Matej Guid and Ivan Bratko investigate in Factors A®ecting Diminishing Returns for Searching Deeper the phenomenon of diminishing returns for addi- tional search e®ort. Using the chess programs Crafty and Rybka on a large set of grandmaster games, they show that diminishing returns depend on (a) the value of positions, (b) the quality of the evaluation function, and (c) the phase of the game and the amount of material on the board. Matej Guid, Aritz P¶erez,and Ivan Bratko in How Trustworthy is Crafty's Analysis of Chess Champions? again used Crafty in an attempt at an objective assessment of the strength of chess grandmasters of di®erent times. They show that their analysis is trustworthy, and hardly depends on the strength of the chess program used, the search depth applied, or the size of the sets of positions used.