24. CRAWLER TRANSPORTER STEERING and JEL SYSTEMS by Virgil Leon Davis John F
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

1993 (179Kb Pdf)
February 4, 1993 KSC Contact: Bruce Buckingham KSC Release No. 10-93 Notice To Editors/News Directors: KSC NEWS CENTER OFFICE HOURS FOR PEGASUS ARRIVAL The NASA B-52 aircraft carrying the Orbital Sciences Cor- poration Pegasus rocket is scheduled to arrive at KSC on Sunday, Feb. 7, with launch targeted for Feb. 9. The aircraft is currently scheduled to depart Edwards Air Force Base, Calif., at about 10:00 a.m. EST on Sunday with a single refueling stopover planned at Sheppard AFB, Texas. If weather permits, arrival of the aircraft at KSC's Shuttle Landing Facility should be about 4:30 p.m. EST. Status updates regarding the cross-country flight will be made on KSC's codaphone over the weekend. This can be reached by calling 407/867-2525. Public Affairs officers will be in the KSC Press Site office by 9:30 a.m. Sunday in order to provide status updates by phone. The office, however, will not officially open until it is deter- mined the aircraft will in fact be arriving at KSC. If it is determined that the aircraft will be successful in completing the day-long trip to KSC on Sunday, the office will officially open at 3:00 p.m. In that event, media interested in viewing the B-52/Pegasus arrival should plan on calling the KSC news center at 407/867-2468 for departure times to the Shuttle Landing Facility. News media who do not possess current credentials must con- tact the Public Information Office before close of business Friday, Feb. -

Space Reporter's Handbook Mission Supplement
CBS News Space Reporter's Handbook - Mission Supplement Page 1 The CBS News Space Reporter's Handbook Mission Supplement Shuttle Mission STS-125: Hubble Space Telescope Servicing Mission 4 Written and Produced By William G. Harwood CBS News Space Analyst [email protected] CBS News 5/10/09 Page 2 CBS News Space Reporter's Handbook - Mission Supplement Revision History Editor's Note Mission-specific sections of the Space Reporter's Handbook are posted as flight data becomes available. Readers should check the CBS News "Space Place" web site in the weeks before a launch to download the latest edition: http://www.cbsnews.com/network/news/space/current.html DATE RELEASE NOTES 08/03/08 Initial STS-125 release 04/11/09 Updating to reflect may 12 launch; revised flight plan 04/15/09 Adding EVA breakdown; walkthrough 04/23/09 Updating for 5/11 launch target date 04/30/09 Adding STS-400 details from FRR briefing 05/04/09 Adding trajectory data; abort boundaries; STS-400 launch windows Introduction This document is an outgrowth of my original UPI Space Reporter's Handbook, prepared prior to STS-26 for United Press International and updated for several flights thereafter due to popular demand. The current version is prepared for CBS News. As with the original, the goal here is to provide useful information on U.S. and Russian space flights so reporters and producers will not be forced to rely on government or industry public affairs officers at times when it might be difficult to get timely responses. All of these data are available elsewhere, of course, but not necessarily in one place. -

7. Operations
7. Operations 7.1 Ground Operations The Exploration Systems Architecture Study (ESAS) team addressed the launch site integra- tion of the exploration systems. The team was fortunate to draw on expertise from members with historical and contemporary human space flight program experience including the Mercury, Gemini, Apollo, Skylab, Apollo Soyuz Test Project, Shuttle, and International Space Station (ISS) programs, as well as from members with ground operations experience reaching back to the Redstone, Jupiter, Pershing, and Titan launch vehicle programs. The team had a wealth of experience in both management and technical responsibilities and was able to draw on recent ground system concepts and other engineering products from the Orbital Space Plane (OSP) and Space Launch Initiative (SLI) programs, diverse X-vehicle projects, and leadership in NASA/Industry/Academia groups such as the Space Propulsion Synergy Team (SPST) and the Advanced Spaceport Technology Working Group (ASTWG). 7.1.1 Ground Operations Summary The physical and functional integration of the proposed exploration architecture elements will occur at the primary launch site at the NASA Kennedy Space Center (KSC). In order to support the ESAS recommendation of the use of a Shuttle-derived Cargo Launch Vehicle (CaLV) and a separate Crew Launch Vehicle (CLV) for lunar missions and the use of a CLV for ISS missions, KSC’s Launch Complex 39 facilities and ground equipment were selected for conversion. Ground-up replacement of the pads, assembly, refurbishment, and/or process- ing facilities was determined to be too costly and time-consuming to design, build, outfit, activate, and certify in a timely manner to support initial test flights leading to an operational CEV/CLV system by 2011. -
Orbiter Processing Facility
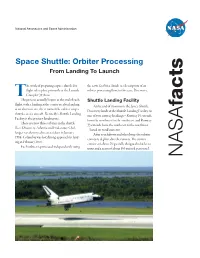
National Aeronautics and Space Administration Space Shuttle: Orbiter Processing From Landing To Launch he work of preparing a space shuttle for the same facilities. Inside is a description of an flight takes place primarily at the Launch orbiter processing flow; in this case, Discovery. Complex 39 Area. TThe process actually begins at the end of each acts Shuttle Landing Facility flight, with a landing at the center or, after landing At the end of its mission, the Space Shuttle f at an alternate site, the return of the orbiter atop a Discovery lands at the Shuttle Landing Facility on shuttle carrier aircraft. Kennedy’s Shuttle Landing one of two runway headings – Runway 15 extends Facility is the primary landing site. from the northwest to the southeast, and Runway There are now three orbiters in the shuttle 33 extends from the southeast to the northwest fleet: Discovery, Atlantis and Endeavour. Chal- – based on wind currents. lenger was destroyed in an accident in January After touchdown and wheelstop, the orbiter 1986. Columbia was lost during approach to land- convoy is deployed to the runway. The convoy ing in February 2003. consists of about 25 specially designed vehicles or Each orbiter is processed independently using units and a team of about 150 trained personnel, NASA some of whom assist the crew in disembarking from the orbiter. the orbiter and a “white room” is mated to the orbiter hatch. The The others quickly begin the processes necessary to “safe” the hatch is opened and a physician performs a brief preliminary orbiter and prepare it for towing to the Orbiter Processing Fa- medical examination of the crew members before they leave the cility. -
Building KSC's Launch Complex 39
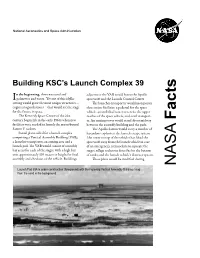
National Aeronautics and Space Administration Building KSC’s Launch Complex 39 n the beginning, there was sand and adjacent to the VAB would house the Apollo I palmettos and water. Yet out of this idyllic spacecraft and the Launch Control Center. setting would grow the most unique structures -- The launcher-transporter would incorporate engineering milestones -- that would set the stage three major facilities: a pedestal for the space for the future in space. vehicle, an umbilical tower to service the upper The Kennedy Space Center of the 21st reaches of the space vehicle, and a rail transport- century began life in the early 1960s when new er. An arming tower would stand about midway Facts facilities were needed to launch the moon-bound between the assembly building and the pads. Saturn V rockets. The Apollo Saturn would carry a number of Initial plans called for a launch complex hazardous explosives: the launch escape system comprising a Vertical Assembly Building (VAB), (the tower on top of the vehicle that lifted the a launcher-transporter, an arming area and a spacecraft away from the launch vehicle in case launch pad. The VAB would consist of assembly of an emergency), retrorockets to separate the bay areas for each of the stages, with a high-bay stages, ullage rockets to force fuel to the bottom unit approximately 110 meters in height for final of tanks, and the launch vehicle’s destruct system. assembly and checkout of the vehicle. Buildings These plans would be modified during NASA NASA Launch Pad 39A is under construction (foreground) with the imposing Vertical Assembly Building rising from the sand in the background. -

America's Spaceport
National Aeronautics and Space Administration America’s Spaceport www.nasa.gov America’s Spaceport John F. Kennedy Space Center “This generation does not intend to founder in the backwash of the coming age of space. We mean to be a part of it — we mean to lead it.” President John Fitzgerald Kennedy September 12, 1962 he John F. Kennedy Space Center — America’s Spaceport — is the doorway to upon Spanish treasure ships laden with riches from space. From its unique facilities, humans and machines have begun the exploration the mines of Mexico and Peru. Shoals, reefs and T of the solar system, reaching out to the sun, the moon, the planets and beyond. storms also exacted their toll on the treasure fleets, While these spectacular achievements have fired the imagination of people throughout leaving behind a sunken bonanza now being reaped the world and enriched the lives of millions, they represent only a beginning. At America’s by modern-day treasure hunters. Spaceport, humanity’s long-cherished dream of establishing permanent outposts on the new space frontier is becoming a reality. By the early 18th century, America’s Spaceport Origins echoed with the footsteps of other intruders: Yet, our leap toward the stars is also an epilogue to a rich and colorful past . an almost English settlers and their Indian allies (the latter to forgotten legacy replete with Indian lore, stalwart adventurers, sunken treasure and hardy become known as the Seminoles) from colonies in pioneers. Georgia and South Carolina. Thus began a new era of conflict and expansion that ouldw continue until The sands of America’s Spaceport bear the imprint of New World history from its earliest the end of the Second U.S. -

+ STS-123 Press
CONTENTS Section Page STS-123 MISSION OVERVIEW................................................................................................ 1 TIMELINE OVERVIEW.............................................................................................................. 11 MISSION PROFILE................................................................................................................... 15 MISSION PRIORITIES............................................................................................................. 17 MISSION PERSONNEL............................................................................................................. 19 STS-123 ENDEAVOUR CREW .................................................................................................. 21 PAYLOAD OVERVIEW .............................................................................................................. 31 KIBO OVERVIEW.................................................................................................................................. 31 KIBO MISSION CONTROL CENTER ....................................................................................................... 39 TSUKUBA SPACE CENTER.................................................................................................................... 43 SPACE STATION INTEGRATION AND PROMOTION CENTER .................................................................. 47 JAXA’S EXPERIMENTS DURING THE 1J/A STAGE................................................................................. -

+ STS-115 Press
STS-121 Press Kit CONTENTS Section Page STS-115 MISSION OVERVIEW: SPACE STATION ASSEMBLY RESUMES................................ 1 STS-115 TIMELINE OVERVIEW ............................................................................................... 10 MISSION PRIORITIES............................................................................................................. 12 LAUNCH AND LANDING ........................................................................................................... 14 LAUNCH............................................................................................................................................... 14 ABORT-TO-ORBIT (ATO)...................................................................................................................... 14 TRANSATLANTIC ABORT LANDING (TAL)............................................................................................. 14 RETURN-TO-LAUNCH-SITE (RTLS)....................................................................................................... 14 ABORT ONCE AROUND (AOA)............................................................................................................... 14 LANDING ............................................................................................................................................. 14 MISSION PROFILE................................................................................................................... 15 STS-115 ATLANTIS CREW ..................................................................................................... -

+ Part 17: Acronyms and Abbreviations (265 Kb PDF)
17. Acronyms and Abbreviations °C . Degrees.Celsius °F. Degrees.Fahrenheit °R . Degrees.Rankine 24/7. 24.Hours/day,.7.days/week 2–D. Two-Dimensional 3C. Command,.Control,.and.Checkout 3–D. Three-Dimensional 3–DOF . Three-Degrees.of.Freedom 6-DOF. Six-Degrees.of.Freedom A&E. Architectural.and.Engineering ACEIT. Automated.Cost-Estimating.Integrated.Tools ACES . Acceptance.and.Checkout.Evaluation.System ACP. Analytical.Consistency.Plan ACRN. Assured.Crew.Return.Vehicle ACRV. Assured.Crew.Return.Vehicle AD. Analog.to.Digital ADBS. Advanced.Docking.Berthing.System ADRA. Atlantic.Downrange.Recovery.Area AEDC. Arnold.Engineering.Development.Center AEG . Apollo.Entry.Guidance AETB. Alumina.Enhanced.Thermal.Barrier AFB .. .. .. .. .. .. .. Air.Force.Base AFE. Aero-assist.Flight.Experiment AFPG. Apollo.Final.Phase.Guidance AFRSI. Advanced.Flexible.Reusable.Surface.Insulation AFV . Anti-Flood.Valve AIAA . American.Institute.of.Aeronautics.and.Astronautics AL. Aluminum ALARA . As.Low.As.Reasonably.Achievable 17. Acronyms and Abbreviations 731 AL-Li . Aluminum-Lithium ALS. Advanced.Launch.System ALTV. Approach.and.Landing.Test.Vehicle AMS. Alpha.Magnetic.Spectrometer AMSAA. Army.Material.System.Analysis.Activity AOA . Analysis.of.Alternatives AOD. Aircraft.Operations.Division APAS . Androgynous.Peripheral.Attachment.System APS. Auxiliary.Propulsion.System APU . Auxiliary.Power.Unit APU . Auxiliary.Propulsion.Unit AR&D. Automated.Rendezvous.and.Docking. ARC . Ames.Research.Center ARF . Assembly/Remanufacturing.Facility ASE. Airborne.Support.Equipment ASI . Augmented.Space.Igniter ASTWG . Advanced.Spaceport.Technology.Working.Group ASTP. Advanced.Space.Transportation.Program AT. Alternate.Turbopump ATCO. Ambient.Temperature.Catalytic.Oxidation ATCS . Active.Thermal.Control.System ATO . Abort-To-Orbit ATP. Authority.to.Proceed ATS. Access.to.Space ATV . Automated.Transfer.Vehicles ATV . -

Processing the Shuttle for Flight
Processing When taking a road trip, it is important to plan ahead by making sure your vehicle is prepared for the journey. A typical road trip on Earth can be the Shuttle for routine and simple. The roadways are already properly paved, service Flight stations are available if vehicle repairs are needed, and food, lodging, and stores for other supplies can also be found. The same, however, could not be said for a Space Shuttle trip into space. The difficulties associated with Steven Sullivan space travel are complex compared with those we face when traveling here. Preparing the Shuttle for Flight Food, lodging, supplies, and repair equipment must be provided for within Ground Processing the space vehicle. Jennifer Hall Peter Nickolenko Vehicle preparation required a large amount of effort to restore the shuttle Jorge Rivera to nearly new condition each time it flew. Since it was a reusable vehicle Edith Stull Steven Sullivan with high technical performance requirements, processing involved a Space Operations Weather tremendous amount of “hands-on” labor; no simple tune-up here. Not only Francis Merceret was the shuttle’s exterior checked and repaired for its next flight, all Robert Scully components and systems within the vehicle were individually inspected and Terri Herst verified to be functioning correctly. This much detail work was necessary Steven Sullivan because a successful flight was dependent on proper vehicle assembly. Robert Youngquist During a launch attempt, decisions were made within milliseconds by equipment and systems that had to perform accurately the first time—there was no room for hesitation or error. -

E N G in E E Rin G Is O Ut O F Th Is W O Rld Light but Strong
National Aeronautics and Space Administration Light but Strong A Lesson in Engineering EP-2015-11-102-MSFC world this of is out engineering teacher Light but Strong notes Materials (per group): Carolyn Russell — In the words Next Generation of an engineer: “Materials Science Standards: • Plastic drinking straws engineering is (30) a diverse, Structure and Properties • Scissors (1 pair) challenging of Matter field of • Pennies (20) study 2-PS1-1. Plan and conduct an • One small paper or because investigation to describe and Styrofoam cup everything classify different kinds of materials • One 3” by 3” piece of in the world by their observable properties. cardboard is made from different 2-PS1-2. Analyze data obtained • Balance scale (optional) materials, each having specific from testing different materials to • Various materials characteristics. To develop a determine which materials have the such as clay, tape new rocket, NASA materials properties that are best suited for an (recommended for engineers must first choose, intended purpose. younger students), or then test the materials, to ensure the rocket is strong and playdough to connect 5-PS1-3. Make observations and light weight so that building can the straws together. measurements to identify materials begin.” based on their properties. Engineering Design An Introduction to Materials Engineering Lesson Duration: 1 hour K-2-ETS1-2. Develop a simple sketch, drawing, or physical model The Challenge to illustrate how the shape of an Design and build a mobile launcher platform that is light enough object helps it function as needed to to be moved to the launch pad, but strong enough to hold the solve a given problem. -

Crawler-Transporter
National Aeronautics and Space Administration Crawler-Transporter pair of behemoth machines called crawler-trans- carry it 3.4 miles to Launch Pad 39A or 4.2 miles A porters have carried the load of taking rockets to Launch Pad 39B. Because each pad is built atop and spacecraft to the launch pad for more than a sloping pyramid, the crawler uses its hydraulic sus- 40 years at NASA’s Kennedy Space Center in Florida. pension to keep the platform level all the way to the Each the size of a baseball infield and powered by top where it sets the platform in place so the vehicle locomotive and large electrical power generator en- can lift off safely. gines, the crawler-transporters stand ready to keep up the work for the next generation of launch vehicles Roller Bearing History projects to lift astronauts into space. The crawlers are unique in the world, having been In a July 1965 test, the crawler moved a launch built in 1965 to move the massive Saturn V rocket umbilical tower about one mile on two short stretches facts from Kennedy’s Vehicle Assembly Building to Launch of road. During the operation, metal fragments were Complex 39. After the moon landing and Skylab discovered on the crawlerway. A thorough search dis- programs ended, the crawlers continued their work, closed pieces of bearing races, rollers and retainers taking space shuttles to their launch pads for 30 from the crawler’s traction-support roller assembly. A years. roller bearing and associated assembly redesign was With the shuttle fleet retired in 2011, the crawlers undertaken in the fall of 1965.