7. Operations
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

New Pad Constructed for Smaller Rocket Launches
PROGRAM HIGHLIGHTS • JULY 2015 At NASA’s Kennedy Space Center in Florida, the Ground Systems Development and Operations (GSDO) Program Office is leading the center’s transfor- mation from a historically government-only launch complex to a spaceport bustling with activity involving government and commercial vehicles alike. GSDO is tasked with developing and using the complex equipment required to safely handle a variety of rockets and spacecraft during assembly, transport and launch. For more information about GSDO accomplishments happening around the center, visit http://go.nasa.gov/groundsystems. New Pad Constructed for Smaller Rocket Launches NASA's Kennedy Space Center in Florida took another step forward in its transformation to a 21st century multi-user spaceport with the completion of the new Small Class Vehicle Launch Pad, designated 39C, in the Launch Pad 39B area. This designated pad to test smaller rockets will make it more affordable for smaller aerospace companies to develop and launch from the center, and to break into the commercial spaceflight market. Kennedy Director Bob Cabana and representatives from the Ground Systems Development and Operations (GSDO) Program and the Center Planning and Development (CPD) and Engineering Directorates marked the completion of the new pad during a ribbon-cutting ceremony July 17. NASA Kennedy Space Center Director Bob Cabana, center, helps cut the ribbon on the new Small Class Vehicle Launch Pad, designated 39C, at Kennedy Space Center in Florida. Also helping to cut the ribbon are, from left, Pat Simpkins, director, Engineering and Technology Directorate; Rich Koller, senior vice president of design firm Jones Edmunds; Scott Col- loredo, director, Center Planning and Development; and Michelle Shoultz, president of Frazier Engineering. -

Analysis of Narrow-Line Laser Cooling and Trapping of Sr Atoms in Microgravity Environments
applied sciences Article Analysis of Narrow-Line Laser Cooling and Trapping of Sr Atoms in Microgravity Environments Jie Ren 1,2, Hui Liu 3,* , Xiaotong Lu 1,2 and Hong Chang 1,2,* 1 CAS Key Laboratory of Time and Frequency Primary Standards, National Time Service Center, Xi’an 710600, China; [email protected] (J.R.); [email protected] (X.L.) 2 School of Astronomy and Space Science, University of Chinese Academy of Sciences, Beijing 100049, China 3 State Key Laboratory of Photoelectric Technology and Functional Materials, International Collaborative Center on Photoelectric Technology and Nano Functional Materials, Institute of Photonics & Photon-Technology, Northwest University, Xi’an 710069, China * Correspondence: [email protected] (H.L.); [email protected] (H.C.) Received: 7 June 2020; Accepted: 15 July 2020; Published: 17 July 2020 Abstract: Obtaining ultracold alkaline earth(-like) atoms in space encounters the problem of performing narrow-line laser cooling in microgravity environments (µ-gEs). This paper reports an analysis of the magneto-optical trap (MOT) based on the narrow-line transition in 88Sr, while paying special attention to the role of the gravity. This analysis suggests the MOTs based on narrow-line transitions cannot be cold and dense enough in a µ-gE. We thus propose a strategy: that one can use a dual-frequency MOT to realize a low-temperature, high density, and high transfer efficiency, narrow-line red MOT in µ-gEs. Keywords: lasering cooling and trapping; microgravity; Monte Carlo simulation; optical lattice clocks; in space 1. Introduction Great efforts have been made in recent decades to push cold atoms into microgravity environments [1]. -

1993 (179Kb Pdf)
February 4, 1993 KSC Contact: Bruce Buckingham KSC Release No. 10-93 Notice To Editors/News Directors: KSC NEWS CENTER OFFICE HOURS FOR PEGASUS ARRIVAL The NASA B-52 aircraft carrying the Orbital Sciences Cor- poration Pegasus rocket is scheduled to arrive at KSC on Sunday, Feb. 7, with launch targeted for Feb. 9. The aircraft is currently scheduled to depart Edwards Air Force Base, Calif., at about 10:00 a.m. EST on Sunday with a single refueling stopover planned at Sheppard AFB, Texas. If weather permits, arrival of the aircraft at KSC's Shuttle Landing Facility should be about 4:30 p.m. EST. Status updates regarding the cross-country flight will be made on KSC's codaphone over the weekend. This can be reached by calling 407/867-2525. Public Affairs officers will be in the KSC Press Site office by 9:30 a.m. Sunday in order to provide status updates by phone. The office, however, will not officially open until it is deter- mined the aircraft will in fact be arriving at KSC. If it is determined that the aircraft will be successful in completing the day-long trip to KSC on Sunday, the office will officially open at 3:00 p.m. In that event, media interested in viewing the B-52/Pegasus arrival should plan on calling the KSC news center at 407/867-2468 for departure times to the Shuttle Landing Facility. News media who do not possess current credentials must con- tact the Public Information Office before close of business Friday, Feb. -

Proposal to Construct and Operate a Satellite Launching Facility on Christmas Island
Environment Assessment Report PROPOSAL TO CONSTRUCT AND OPERATE A SATELLITE LAUNCHING FACILITY ON CHRISTMAS ISLAND Environment Assessment Branch 2 May 2000 Christmas Island Satellite Launch Facility Proposal Environment Assessment Report - Environment Assessment Branch – May 2000 3 Table of Contents 1 INTRODUCTION..............................................................................................6 1.1 GENERAL ...........................................................................................................6 1.2 ENVIRONMENT ASSESSMENT............................................................................7 1.3 THE ASSESSMENT PROCESS ...............................................................................7 1.4 MAJOR ISSUES RAISED DURING THE PUBLIC COMMENT PERIOD ON THE DRAFT EIS .................................................................................................................9 1.4.1 Socio-economic......................................................................................10 1.4.2 Biodiversity............................................................................................10 1.4.3 Roads and infrastructure .....................................................................11 1.4.4 Other.......................................................................................................12 2 NEED FOR THE PROJECT AND KEY ALTERNATIVES ......................14 2.1 NEED FOR THE PROJECT ..................................................................................14 2.2 KEY -

China's Space Program
China’s Space Program An Introduction China’s Space Program ● Motivations ● Organization ● Programs ○ Satellites ○ Manned Space flight ○ Lunar Exploration Program ○ International Relations ● Summary China’s Space Program Motivations Stated Purpose ● Explore outer space and to enhance understanding of the Earth and the cosmos ● Utilize outer space for peaceful purposes, promote human civilization and social progress, and to benefit the whole of mankind ● Meet the demands of economic development, scientific and technological development, national security and social progress ● Improve the scientific and cultural knowledge of the Chinese people ● Protect China's national rights and interests ● Build up China’s national comprehensive strength National Space Motivations • Preservation of its political system is overriding goal • The CCP prioritizes investments into space technology ○ Establish PRC as an equal among world powers ○ Space for international competition and cooperation ○ Manned spaceflight ● Foster national pride ● Enhance the domestic and international legitimacy of the CCP. ○ Space technology is metric of political legitimacy, national power, and status globally China’s Space Program Organization The China National Space Administration (CNSA) ● The China National Space Administration (CNSA, GuóJiā HángTiān Jú,) ○ National space agency of the People's Republic of China ○ Responsible for the national space program. ■ Planning and development of space activities. The China National Space Administration ● CNSA and China Aerospace -

View / Download
www.arianespace.com www.starsem.com www.avio Arianespace’s eighth launch of 2021 with the fifth Soyuz of the year will place its satellite passengers into low Earth orbit. The launcher will be carrying a total payload of approximately 5 518 kg. The launch will be performed from Baikonur, in Kazakhstan. MISSION DESCRIPTION 2 ONEWEB SATELLITES 3 Liftoff is planned on at exactly: SOYUZ LAUNCHER 4 06:23 p.m. Washington, D.C. time, 10:23 p.m. Universal time (UTC), LAUNCH CAMPAIGN 4 00:23 a.m. Paris time, FLIGHT SEQUENCES 5 01:23 a.m. Moscow time, 03:23 a.m. Baikonur Cosmodrome. STAKEHOLDERS OF A LAUNCH 6 The nominal duration of the mission (from liftoff to separation of the satellites) is: 3 hours and 45 minutes. Satellites: OneWeb satellite #255 to #288 Customer: OneWeb • Altitude at separation: 450 km Cyrielle BOUJU • Inclination: 84.7degrees [email protected] +33 (0)6 32 65 97 48 RUAG Space AB (Linköping, Sweden) is the prime contractor in charge of development and production of the dispenser system used on Flight ST34. It will carry the satellites during their flight to low Earth orbit and then release them into space. The dedicated dispenser is designed to Flight ST34, the 29th commercial mission from the Baikonur Cosmodrome in Kazakhstan performed by accommodate up to 36 spacecraft per launch, allowing Arianespace and its Starsem affiliate, will put 34 of OneWeb’s satellites bringing the total fleet to 288 satellites Arianespace to timely deliver the lion’s share of the initial into a near-polar orbit at an altitude of 450 kilometers. -
Launching Orion Into Space
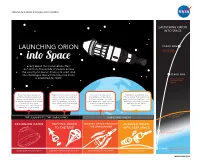
National Aeronautics and Space Administration LAUNCHING ORION INTO SPACE LAUNCHING ORION 27,000 MPH Speed to propel into Space to Deep Space Learn about the tremendous effort put forth by thousands of people across the country to launch Orion into orbit, and the challenges that will be faced as Orion 17,500 MPH is prepared for flight. Orion separating from the launch vehicle Orion has been designed Flight tests are difficult and There are thousands of Separation events that are with the minimal mass and complex but are necessary for steps that must be carried critical during Orion’s first few maximum capability needed engineers to gain confidence out sequentially – or even minutes of spaceflight are very to safely transport everything that the systems critical to simultaneously – and function dynamic, requiring the close needed for four crew crew safety will work during in perfect harmony for a attention of the entire members to live and work in space flight. seamless launch. flight team. space for up to 21 days. E SPAC N OF ITIO FIN ES) DE MIL THE JOURNEY TO THE LAUNCH PAD LAUNCHING ORION (62 DESIGNING ORION PUTTING ORION SENDING ORION THROUGH PUSHING ORION TO THE TEST THE ATMOSPHERE INTO DEEP SPACE Orion accelerating through Earth’s atmosphere Orion on the launch pad O MPH at NASA’s multi-purpose AN ENGINEER’S MAGNUM OPUS RIGOROUS TESTING PRIOR TO FLIGHT OVERCOMING EARTH’S GRAVITY ACHIEVING SUCCESS spaceport in Florida www.nasa.gov Challenges of Spaceflight: Putting Orion to the Test Spaceflight Stage Fright Launching Orion into Space The Orion spacecraft is comprised of the crew module, On Orion’s way to orbit, there are a series of events where astronauts will live and work during the mission; that must occur to separate the spacecraft from the Orion is America’s next-generation spacecraft. -

Chang'e 5 Samples (Mexag) (Head-Final)
Chang’E 5 Lunar Sample Return Mission Update James w. Head Department of Earth, Environmental and Planetary Sciences Brown University Providence, RI 02912 USA Extraterrestrial Materials Analysis Group (ExMAG) Spring Meeting: April 7 - 8, 2021. Extraterrestrial Materials Analysis Group (ExMAG) Spring Meeting Barbara Cohen, ExMAG Chair. 2/10/21 • 1. Please provide an update on the Chang'e 5 Sample Return Mission. • 2. What is known of the collection so far? • 3. Please provide an overview of allocation procedures. • 4. Since US federally-funded researchers cannot work directly with China - Who outside of China is working with the mission team? • 5. We'd also appreciate your thoughts on: What NASA might be able to do to enable the US analysis community to collaborate on this sample collection? Extraterrestrial Materials Analysis Group (ExMAG) Spring Meeting Barbara Cohen, ExMAG Chair. 2/10/21 • 1. Some Myths and Realities. • 2. Organization of the Chinese Space Program. • 3. Chinese Lunar Exploration Program (CLEP) context for Chang’e 5. • 4. Chang’e 5 Landing Site Selection, Global Context, Key Questions, Mission Operations and Sample Return. • 5. Returned Sample Location, Storage, Preliminary Analysis and Distribution. • 6. Opportunities for International Cooperation. Extraterrestrial Materials Analysis Group (ExMAG) Spring Meeting Barbara Cohen, ExMAG Chair. 2/10/21 • 1. Some Myths and Realities. • 2. Organization of the Chinese Space Program. • 3. Chinese Lunar Exploration Program (CLEP) context for Chang’e 5. • 4. Chang’e 5 Landing Site Selection, Global Context, Key Questions, Mission Operations and Sample Return. • 5. Returned Sample Location, Storage, Preliminary Analysis and Distribution. • 6. Opportunities for International Cooperation. -

A Pictorial History of Rockets
he mighty space rockets of today are the result A Pictorial Tof more than 2,000 years of invention, experi- mentation, and discovery. First by observation and inspiration and then by methodical research, the History of foundations for modern rocketry were laid. Rockets Building upon the experience of two millennia, new rockets will expand human presence in space back to the Moon and Mars. These new rockets will be versatile. They will support Earth orbital missions, such as the International Space Station, and off- world missions millions of kilometers from home. Already, travel to the stars is possible. Robotic spacecraft are on their way into interstellar space as you read this. Someday, they will be followed by human explorers. Often lost in the shadows of time, early rocket pioneers “pushed the envelope” by creating rocket- propelled devices for land, sea, air, and space. When the scientific principles governing motion were discovered, rockets graduated from toys and novelties to serious devices for commerce, war, travel, and research. This work led to many of the most amazing discoveries of our time. The vignettes that follow provide a small sampling of stories from the history of rockets. They form a rocket time line that includes critical developments and interesting sidelines. In some cases, one story leads to another, and in others, the stories are inter- esting diversions from the path. They portray the inspirations that ultimately led to us taking our first steps into outer space. NASA’s new Space Launch System (SLS), commercial launch systems, and the rockets that follow owe much of their success to the accomplishments presented here. -
America's Greatest Projects and Their Engineers - VII
America's Greatest Projects and Their Engineers - VII Course No: B05-005 Credit: 5 PDH Dominic Perrotta, P.E. Continuing Education and Development, Inc. 22 Stonewall Court Woodcliff Lake, NJ 076 77 P: (877) 322-5800 [email protected] America’s Greatest Projects & Their Engineers-Vol. VII The Apollo Project-Part 1 Preparing for Space Travel to the Moon Table of Contents I. Tragedy and Death Before the First Apollo Flight A. The Three Lives that Were Lost B. Investigation, Findings & Recommendations II. Beginning of the Man on the Moon Concept A. Plans to Land on the Moon B. Design Considerations and Decisions 1. Rockets – Launch Vehicles 2. Command/Service Module 3. Lunar Module III. NASA’s Objectives A. Unmanned Missions B. Manned Missions IV. Early Missions V. Apollo 7 Ready – First Manned Apollo Mission VI. Apollo 8 - Orbiting the Moon 1 I. Tragedy and Death Before the First Apollo Flight Everything seemed to be going well for the Apollo Project, the third in a series of space projects by the United States intended to place an American astronaut on the Moon before the end of the 1960’s decade. Apollo 1, known at that time as AS (Apollo Saturn)-204 would be the first manned spaceflight of the Apollo program, and would launch a few months after the flight of Gemini 12, which had occurred on 11 November 1966. Although Gemini 12 was a short duration flight, Pilot Buzz Aldrin had performed three extensive EVA’s (Extra Vehicular Activities), proving that Astronauts could work for long periods of time outside the spacecraft. -
Orbiter Processing Facility
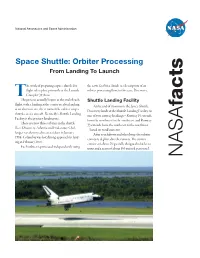
National Aeronautics and Space Administration Space Shuttle: Orbiter Processing From Landing To Launch he work of preparing a space shuttle for the same facilities. Inside is a description of an flight takes place primarily at the Launch orbiter processing flow; in this case, Discovery. Complex 39 Area. TThe process actually begins at the end of each acts Shuttle Landing Facility flight, with a landing at the center or, after landing At the end of its mission, the Space Shuttle f at an alternate site, the return of the orbiter atop a Discovery lands at the Shuttle Landing Facility on shuttle carrier aircraft. Kennedy’s Shuttle Landing one of two runway headings – Runway 15 extends Facility is the primary landing site. from the northwest to the southeast, and Runway There are now three orbiters in the shuttle 33 extends from the southeast to the northwest fleet: Discovery, Atlantis and Endeavour. Chal- – based on wind currents. lenger was destroyed in an accident in January After touchdown and wheelstop, the orbiter 1986. Columbia was lost during approach to land- convoy is deployed to the runway. The convoy ing in February 2003. consists of about 25 specially designed vehicles or Each orbiter is processed independently using units and a team of about 150 trained personnel, NASA some of whom assist the crew in disembarking from the orbiter. the orbiter and a “white room” is mated to the orbiter hatch. The The others quickly begin the processes necessary to “safe” the hatch is opened and a physician performs a brief preliminary orbiter and prepare it for towing to the Orbiter Processing Fa- medical examination of the crew members before they leave the cility. -

Advantages and Limitations of Current Microgravity Platforms for Space Biology Research
applied sciences Review Advantages and Limitations of Current Microgravity Platforms for Space Biology Research Francesca Ferranti, Marta Del Bianco * and Claudia Pacelli Italian Space Agency, Via del Politecnico snc, 00133 Rome, Italy; [email protected] (F.F.); [email protected] (C.P.) * Correspondence: [email protected] Abstract: Human Space exploration has created new challenges and new opportunities for science. Reaching beyond the Earth’s surface has raised the issue of the importance of gravity for the de- velopment and the physiology of biological systems, while giving scientists the tools to study the mechanisms of response and adaptation to the microgravity environment. As life has evolved under the constant influence of gravity, gravity affects biological systems at a very fundamental level. Owing to limited access to spaceflight platforms, scientists rely heavily on on-ground facilities that reproduce, to a different extent, microgravity or its effects. However, the technical constraints of counterbalancing the gravitational force on Earth add complexity to data interpretation. In-flight experiments are also not without their challenges, including additional stressors, such as cosmic radi- ation and lack of convection. It is thus extremely important in Space biology to design experiments in a way that maximizes the scientific return and takes into consideration all the variables of the chosen setup, both on-ground or on orbit. This review provides a critical analysis of current ground-based and spaceflight facilities. In particular, the focus was given to experimental design to offer the reader the tools to select the appropriate setup and to appropriately interpret the results. Keywords: microgravity; ground-based facility; international Space station; clinostat; RPM; bed rest; CubeSat Citation: Ferranti, F.; Del Bianco, M.; Pacelli, C.