Template for Creating Reports in Delft Hydraulics Style V.3.01
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Bericht Überwachungsergebnisse Fische 2006 Bis 2014
Überwachungsergebnisse Fische 2006 bis 2014 Biologisches Monitoring der Fließgewässer gemäß EG-Wasserrahmenrichtlinie Überwachungsergebnisse Fische 2006 bis 2014 Biologisches Monitoring der Fließgewässer gemäß EG-Wasserrahmenrichtlinie BEARBEITUNG LUBW Landesanstalt für Umwelt, Messungen und Naturschutz Baden-Württemberg Postfach 100163, 76231 Karlsruhe Referat 41 – Gewässerschutz Uwe Bergdolt STAND Dezember 2015 Nachdruck - auch auszugsweise - ist nur mit Zustimmung der LUBW unter Quellenangabe und Überlassung von Belegexemplaren gestattet. ZUSAMMENFASSUNG 5 1 EINLEITUNG 7 2 AUSGANGSLAGE 8 2.1 Das fischbasierte Bewertungsverfahren fiBS 8 2.1.1 Fischökologische Referenzen 8 2.1.2 Fischereiliche Bestandsaufnahme 9 2.1.3 Bewertungsalgorithmus 10 2.1.4 Bewertungsergebnisse im Bereich von Klassengrenzen 12 2.2 Vorarbeiten bis 2010 13 2.2.1 Allgemeine Hinweise 13 2.2.2 Entwicklung des Messnetzes und des Fischmonitorings 14 3 FISCHBASIERTE FLIEßGEWÄSSERBEWERTUNG IN BADEN-WÜRTTEMBERG 16 3.1 Monitoringstellen-Bewertung 16 3.1.1 Zeitraum der fischBestandsaufnahmen 16 3.1.2 Plausibilisierung der Rohdaten 16 3.1.3 Monitoringstellen in erheblich veränderten und künstlichen Wasserkörpern 19 3.1.4 Ergebnisse 19 3.2 Wasserkörper-Bewertung 21 3.2.1 Aggregationsregeln 21 3.2.2 Ergebnisse 24 4 ERLÄUTERUNGEN ZU DEN BEWERTUNGSERGEBNISSEN 27 4.1 Umgang mit hochvariablen Ergebnissen 27 5 KÜNFTIGE ENTWICKLUNGEN 28 5.1 Feinverfahren zur Gewässerstrukturkartierung 28 5.2 Monitoringnetz 28 5.3 Zeitraster der Fischbestandsaufnahmen 30 LITERATUR- UND QUELLENVERZEICHNIS 31 ANHÄNGE 34 Zusammenfassung Im vorliegenden Bericht werden die von der Fischereiforschungsstelle des Landwirtschaftlichen Zentrums für Rinderhaltung, Grünlandwirtschaft, Milchwirtschaft, Wild und Fischerei Baden-Württemberg im Auftrag der LUBW bis zum Sommer 2014 in Baden-Württemberg durchgeführten Arbeiten zur ökologischen Fließ- gewässerbewertung auf Grundlage der Biokomponente Fischfauna gemäß EG-Wasserrahmenrichtlinie (WRRL) erläutert und dokumentiert. -

General Index
General Index Italicized page numbers indicate figures and tables. Color plates are in- cussed; full listings of authors’ works as cited in this volume may be dicated as “pl.” Color plates 1– 40 are in part 1 and plates 41–80 are found in the bibliographical index. in part 2. Authors are listed only when their ideas or works are dis- Aa, Pieter van der (1659–1733), 1338 of military cartography, 971 934 –39; Genoa, 864 –65; Low Coun- Aa River, pl.61, 1523 of nautical charts, 1069, 1424 tries, 1257 Aachen, 1241 printing’s impact on, 607–8 of Dutch hamlets, 1264 Abate, Agostino, 857–58, 864 –65 role of sources in, 66 –67 ecclesiastical subdivisions in, 1090, 1091 Abbeys. See also Cartularies; Monasteries of Russian maps, 1873 of forests, 50 maps: property, 50–51; water system, 43 standards of, 7 German maps in context of, 1224, 1225 plans: juridical uses of, pl.61, 1523–24, studies of, 505–8, 1258 n.53 map consciousness in, 636, 661–62 1525; Wildmore Fen (in psalter), 43– 44 of surveys, 505–8, 708, 1435–36 maps in: cadastral (See Cadastral maps); Abbreviations, 1897, 1899 of town models, 489 central Italy, 909–15; characteristics of, Abreu, Lisuarte de, 1019 Acequia Imperial de Aragón, 507 874 –75, 880 –82; coloring of, 1499, Abruzzi River, 547, 570 Acerra, 951 1588; East-Central Europe, 1806, 1808; Absolutism, 831, 833, 835–36 Ackerman, James S., 427 n.2 England, 50 –51, 1595, 1599, 1603, See also Sovereigns and monarchs Aconcio, Jacopo (d. 1566), 1611 1615, 1629, 1720; France, 1497–1500, Abstraction Acosta, José de (1539–1600), 1235 1501; humanism linked to, 909–10; in- in bird’s-eye views, 688 Acquaviva, Andrea Matteo (d. -

Pastports, Vol. 3, No. 8 (August 2010). News and Tips from the Special Collections Department, St. Louis County Library
NEWS AND TIPS FROM THE ST. LOUIS COUNTY LIBRARY SPECIAL COLLECTIONS DEPARTMENT VOL. 3, No. 8—AUGUST 2010 PastPorts is a monthly publication of the Special Collections Department FOR THE RECORDS located on Tier 5 at the St. Louis County Library Ortssippenbücher and other locale–specific Headquarters, 1640 S. Lindbergh in St. Louis sources are rich in genealogical data County, across the street Numerous rich sources for German genealogy are published in German-speaking from Plaza Frontenac. countries. Chief among them are Ortssippenbücher (OSBs), also known as Ortsfamilienbücher, Familienbücher, Dorfsippenbücher and Sippenbücher. CONTACT US Literally translated, these terms mean “local clan books” (Sippe means “clan”) or To subscribe, unsubscribe, “family books.” OSBs are the published results of indexing and abstracting change email addresses, projects usually done by genealogical and historical societies. make a comment or ask An OSB focuses on a local village or grouping of villages within an ecclesiastical a question, contact the parish or administrative district. Genealogical information is abstracted from local Department as follows: church and civil records and commonly presented as one might find on a family group sheet. Compilers usually assign a unique numerical code to each individual BY MAIL for cross–referencing purposes (OSBs for neighboring communities can also reference each other). Genealogical information usually follows a standard format 1640 S. Lindbergh Blvd. using common symbols and abbreviations, making it possible to decipher entries St. Louis, MO 63131 without an extensive knowledge of German. A list of symbols and abbreviations used in OSBs and other German genealogical sources is on page 10. BY PHONE 314–994–3300, ext. -

Teilbearbeitungsgebiet 35 - Pfinz - Saalbach - Kraichbach
Begleitdokumentation zum Bearbeitungsgebiet Oberrhein (BW) Teilbearbeitungsgebiet 35 - Pfinz - Saalbach - Kraichbach - Umsetzung der EG-Wasserrahmenrichtlinie (2000/60/EG) Stand: Dezember 2015 BEARBEITUNG Regierungspräsidium Karlsruhe Referat 52 Gewässer und Boden Markgrafenstr. 46 76247 Karlsruhe www.rp-karlsruhe.de unter fachlicher Beteiligung der Landratsämter Enzkreis, Karlsruhe, Rhein-Neckar-Kreis und der Stadtkreise Heidelberg, Karlsruhe, Mannheim und Pforzheim sowie unter Mitwirkung des Ministeriums für Umwelt, Klima und Energiewirtschaft Baden-Württemberg und der Landesanstalt für Umwelt, Messungen und Naturschutz Baden-Württemberg STAND Dezember 2015 2 Begleitdokumentation BG Oberrhein TBG 35 INHALTSVERZEICHNIS Einführung ............................................................................................................................. 5 Grundlagen und Ziele der Wasserrahmenrichtlinie ............................................................ 5 Gebietskulisse und Planungsebenen in Baden-Württemberg ............................................. 5 Vorgehensweise und Erarbeitungsprozess ........................................................................ 6 Information und Beteiligung der Öffentlichkeit .................................................................... 7 Aufbau und Zielsetzung des Begleitdokuments .................................................................. 7 1 Allgemeine Beschreibung ............................................................................................... 8 1.1 Oberflächengewässer -

In BW Das Magazin Des Sports in Baden-Württemberg
SPORTAusgabe BSB Nord – 06 | 2009 in BW n-Württemberg ports in Bade azin des S Das Mag Integration Kinder und Jugendliche mit einem sogenannten Migrationshintergrund in die Gesellschaft zu integrieren gehört zu den vordringlichsten Aufgaben des Sports. Ein Programm der Praxis ist „junik im Sport“. Sturzprävention Bereits zum vierten Mal bot der Badische Sport- bund in Kooperation mit dem Geriatrischen Zentrum Karlsruhe einen Lehrgang „Sturzprävention für ältere Menschen“ an. ARAG Sportversicherung Die ARAG informiert heute über den Schutz von Mobilien und Immobilien im Verein sowie über einen außergewöhnlichen Schadensfall. Ein Glücksfall für den Sport Foto: Uwe Kolbusch Unsere Partner &JO(MDLTGBMMGS#BEFO8SUUFNCFSH .JP&VSPKjISMJDIGSEJF 4QPSUGzSEFSVOHJN-BOE $ISJTUJOB0CFSHGzMM %FVUTDIF.FJTUFSJO JN4QFFSXVSG 4QJFMUFJMOBINFBC+BISFO(MDLTTQJFMLBOOTDIUJHNBDIFO /jIFSF *OGPSNBUJPOFOCFJ -0550VOE VOUFSXXXMPUUPEF SPIELEN )PUMJOFEFS#;H" LPTUFOMPTVOEBOPOZN AB 18 JAHREN INHALT In diesem Heft SPORT IN BW Titelthema: „junik im Sport“ – Die kulturelle Vielfalt als Motor der Entwicklung 4 Von EDITORIAL Klaus Tappeser Sportjugendförderpreise im Europa-Park in Rust vergeben 6 Präsident des Minister ehrt Welt- und Europameister im Schloss 8 Württembergischen Landessportbundes Glückwunsch: LSV gratuliert Friedrichshafener Volleyballern und den Fußballern des SC Freiburg zu deren Meisterschaften 9 Sport hat Signalwirkung Landestrainer Kurt Reusch in den Ruhestand verabschiedet 10 bei der Integration Baden-Württemberg bei „Jugend trainiert ...“ Spitze 11 Es soll keiner sagen, Sport und Integration sei kein wichtiges Thema: In Baden-Württemberg weist BA DI SCHER SPORT BUND NORD jede vierte Bewohnerin und jeder vierte Bewoh- ner einen Migrationshintergrund auf, stammt also Übungsleiterfortbildung „Sturzprävention für ältere Menschen“ 12 aus nach Deutschland eingewanderten Familien. Mach2. Besser essen. Mehr bewegen 15 Von den Unter-18-Jährigen ist es sogar jeder Drit- DBU-Sonderprogramm: Klima- und Ressourcenschutz 16 te. -

Von Der Quelle Zur Mündung, Eine Sedimentbilanz Des Rheins
Forschungs- und Entwicklungsprojekt der Bundesanstalt für Gewässerkunde im Rahmen der Ressortforschung des Bundesministeriums für Verkehr und digitale Infrastruktur Von der Quelle zur Mündung, eine Sedimentbilanz des Rheins Teil 3: Rheinnebenflüsse als Sedimentlieferanten BfG Bundesanstalt für Gewässerkunde IWW Lehrstuhl und Institut für Wasserbau und Wasserwirtschaft der RWTH Aachen University KHR Internationale Kommission für die Hydrologie des Rheingebietes BfG-1812 Bericht Von der Quelle zur Mündung, eine Sedimentbilanz des Rheins Rheinnebenflüsse als Sedimentlieferanten BfG-SAP-Nr. : M39610304039 Seitenzahl : 48 Bearbeitung : Nicole Gehres Birgit Astor Dr. Gudrun Hillebrand Koblenz, 17. September 2014 Der Bericht darf nur ungekürzt vervielfältigt werden. Die Vervielfältigung oder eine Veröffentlichungen bedürfen der schriftlichen Genehmigung der Bundesanstalt für Gewässerkunde. Bundesanstalt für Gewässerkunde Von der Quelle zur Mündung, eine Sedimentbilanz des Rheins Rheinnebenflüsse als Sediment- lieferanten Seite 2 Bundesanstalt für Gewässerkunde Von der Quelle zur Mündung, eine Sedimentbilanz des Rheins Inhaltsverzeichnis Rheinnebenflüsse als Sediment- lieferanten ................................................................................................................................................... 8 1. Hintergrund ......................................................................................................................... 9 2. Geographie, Hydrologie und Sedimentologie der Rheinnebenflüsse .......................... -
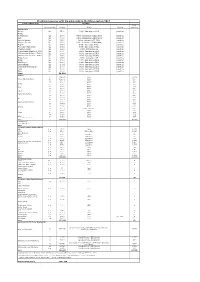
Stocking Measures with Big Salmonids in the Rhine System 2017
Stocking measures with big salmonids in the Rhine system 2017 Country/Water body Stocking smolt Kind and stage Number Origin Marking equivalent Switzerland Wiese Lp 3500 Petite Camargue B1K3 genetics Rhine Riehenteich Lp 1.000 Petite Camargue K1K2K4K4a genetics Birs Lp 4.000 Petite Camargue K1K2K4K4a genetics Arisdörferbach Lp 1.500 Petite Camargue F1 Wild genetics Hintere Frenke Lp 2.500 Petite Camargue K1K2K4K4a genetics Ergolz Lp 3.500 Petite Camargue K7C1 genetics Fluebach Harbotswil Lp 1.300 Petite Camargue K7C1 genetics Magdenerbach Lp 3.900 Petite Camargue K5 genetics Möhlinbach (Bachtele, Möhlin) Lp 600 Petite Camargue B7B8 genetics Möhlinbach (Möhlin / Zeiningen) Lp 2.000 Petite Camargue B7B8 genetics Möhlinbach (Zuzgen, Hellikon) Lp 3.500 Petite Camargue B7B8 genetics Etzgerbach Lp 4.500 Petite Camargue K5 genetics Rhine Lp 1.000 Petite Camargue B2K6 genetics Old Rhine Lp 2.500 Petite Camargue B2K6 genetics Bachtalbach Lp 1.000 Petite Camargue B2K6 genetics Inland canal Klingnau Lp 1.000 Petite Camargue B2K6 genetics Surb Lp 1.000 Petite Camargue B2K6 genetics Bünz Lp 1.000 Petite Camargue B2K6 genetics Sum 39.300 France L0 269.147 Allier 13457 Rhein (Alt-/Restrhein) L0 142.000 Rhine 7100 La 31.500 Rhine 3150 L0 5.000 Rhine 250 Doller La 21.900 Rhine 2190 L0 2.500 Rhine 125 Thur La 12.000 Rhine 1200 L0 2.500 Rhine 125 Lauch La 5.000 Rhine 500 Fecht und Zuflüsse L0 10.000 Rhine 500 La 39.000 Rhine 3900 L0 4.200 Rhine 210 Ill La 17.500 Rhine 1750 Giessen und Zuflüsse L0 10.000 Rhine 500 La 28.472 Rhine 2847 L0 10.500 Rhine 525 -

Ersatzverkehr S1/S11 Karlsruhe
Verlauf der Linie 99 Ersatzverkehr S1/S11 Nord Michelsbach Michelsbach Michelsbach Michelsbach Michelsbach Michelsbach Hochstetten Michelsbach Hochstetten (Ersatzhalt) Michelsbach Michelsbach Michelsbach Linkenheim-Hochstetten Michelsbach Mich e ls b a ch Hochstetten Grenzstraße Michelsbach Michelsb ach Michelsbach Linkenheim Mich elsb Leimersheim ach Linkenheim Rathaus (Ersatzhalt) Linkenheim Friedrichstraße (Ersatzhalt) Neupotz Linkenheim Süd (Ersatzhalt) Pfinz-EntlastungskanalPfinz -Entlastungskanal Pfinz-EntlastungskanalPfinz -Entlastungskanal Friedrichstal Pfinz-Entlastungskanal Pfinz-EntlastungskanalPfinz -Entlastungskanal Pfinz-EntlastungskanalPfinz -Entlastungskanal Albüberleitung Leopoldshafen Leopoldstraße Albüberleitung Leopoldshafen Pfinz-EntlastungskanalPfinz -Entlastungskanal Albüberleitung PfinzPfinz-Entlastungskanal -Entlastungskanal Pfinz-EntlastungskanalPfinz -Entlastungskanal Albüberleitung Pfinz-Entlastungskan al Pfinz-EntlastungskanalPfinz -Entlastungskanal Herrenwasser Albüberleitung Leopoldshafen VViermorgeniermorgen (Ersatzhalt) Albüberleitung Herrenwasser Eggenstein-Leopoldshafen Albüberleitung Pfinz-Entlastungskanal Altrhein Herrenwasser Herrenwasser Altrhein Albüberleitung Eggenstein Spargelhof (Ersatzhalt) Altrhein Herrenwasser Altrhein Albüberleitung Herrenwasser Pfinz-EntlastungskanalPfinz Altrhein -Entlastungskanal enwasser rr e H Albüberleitung Schlute Albüberleitung Herrenwasser Kleines Loch Albüberleitung Schlute Alb Kleines Eggenstein Spöcker WWegeg (Ersatzhalt) Loch Albüberleitung Eggenstein Pfinz-Entlastungskanal -

Fifty-Second Year the Jewish Publication Society Of
REPORT OF THE FIFTY-SECOND YEAR OF THE JEWISH PUBLICATION SOCIETY OF AMERICA 1939-1940 THE JEWISH PUBLICATION SOCIETY OF AMERICA OFFICERS PRESIDENT J. SOLIS-COHEN, Jr., Philadelphia VICE-PRESIDENT HON. HORACE STERN, Philadelphia TREASURER HOWARD A. WOLF, Philadelphia SECRETARY-EXECUTIVE DIRECTOR MAURICE JACOBS, Philadelphia EDITOR DR. SOLOMON GRAYZEL, Philadelphia HONORARY VICE-PRESIDENTS ISAAC W. BERNHEIM1 Denver REV. DR. HENRY COHEN2 Galveston HON. ABRAM I. ELKUS1 New York City Louis E. KIRSTEIN2 Boston HON. JULIAN W. MACK2 New York City JAMES MARSHALL3 New York City HENRY MONSKY3 Omaha HON. MURRAY SEASONGOOD1 Cincinnati HON. M. C. SLOSS1 San Francisco REV. DR. JOSEPH STOLZ' Chicago HENRIETTA SZOLD3 Jerusalem TRUSTEES MARCUS AARON1 Pittsburgh PHILIP AMRAM1 Philadelphia EDWARD BAKER2 Cleveland HART BLUMENTHAL3 Philadelphia FRED M. BUTZEL3 Detroit J. SOLIS-COHEN, JR.1 Philadelphia BERNARD L. FRANKEL3 Philadelphia LIONEL FRIEDMANN" Philadelphia REV. DR. SOLOMON GOLDMAN1 Chicago REV. DR. NATHAN KRASS2 New York City SAMUEL C. LAMPORT2 New York City HON. LOUIS E. LEVINTHAL1 Philadelphia 1. Term expires in 1941 2. Term expires in 1942 3. Term expires in 1943 677 678 AMERICAN JEWISH YEAR BOOK HOWARD S. LEVY' Philadelphia REV. DR. LOUIS L. MANN2 Chicago SIMON MILLER* Philadelphia EDWARD A. NORMANS New York City CARL H. PFORZHEIMER2 New York City DR. A. S. W. ROSENBACH3 Philadelphia FRANK J. RUBENSTEIN3 Baltimore HARRY SCHERMAN2 New York City REV. DR. ABBA HILLEL SILVER1 Cleveland HON. HORACE STERN3 Philadelphia EDWIN WOLF, 2ND1 Philadelphia HOWARD A. WOLF1 Philadelphia PUBLICATION COMMITTEE HON. LOUIS E. LEVINTHAL, Chairman Philadelphia REV. DR. MORTIMER J. COHEN Philadelphia J. SOLIS-COHEN, JR Philadelphia DR. SOLOMON SOLIS-COHEN Philadelphia REV. -

Council CNL(14)23 Annual Progress Report on Actions Taken
Agenda Item 6.1 For Information Council CNL(14)23 Annual Progress Report on Actions Taken Under Implementation Plans for the Calendar Year 2013 EU – Germany CNL(14)23 Annual Progress Report on Actions taken under Implementation Plans for the Calendar Year 2013 The primary purposes of the Annual Progress Reports are to provide details of: • any changes to the management regime for salmon and consequent changes to the Implementation Plan; • actions that have been taken under the Implementation Plan in the previous year; • significant changes to the status of stocks, and a report on catches; and • actions taken in accordance with the provisions of the Convention These reports will be reviewed by the Council. Please complete this form and return it to the Secretariat by 1 April 2014. The annual report 2013 is structured according to the catchments of the rivers Rhine, Ems, Weser and Elbe. Party: European Union Jurisdiction/Region: Germany 1: Changes to the Implementation Plan 1.1 Describe any proposed revisions to the Implementation Plan and, where appropriate, provide a revised plan. Item 3.3 - Provide an update on progress against actions relating to Aquaculture, Introductions and Transfers and Transgenics (section 4.8 of the Implementation Plan) - has been supplemented by a new measure (A2). 1.2 Describe any major new initiatives or achievements for salmon conservation and management that you wish to highlight. Rhine ICPR The 15th Conference of Rhine Ministers held on 28th October 2013 in Basel has agreed on the following points for the rebuilding of a self-sustainable salmon population in the Rhine system in its Communiqué of Ministers (www.iksr.org / International Cooperation / Conferences of Ministers): - Salmon stocking can be reduced step by step in parts of the River Sieg system in the lower reaches of the Rhine, even though such stocking measures on the long run remain absolutely essential in the upper reaches of the Rhine, in order to increase the number of returnees and to enhance the carefully starting natural reproduction. -

Strategien Zur Wiedereinbürgerung Des Atlantischen Lachses
Restocking – Current and future practices Experience in Germany, success and failure Presentation by: Dr. Jörg Schneider, BFS Frankfurt, Germany Contents • The donor strains • Survival rates, growth and densities as indicators • Natural reproduction as evidence for success - suitability of habitat - ability of the source • Return rate as evidence for success • Genetics and quality of stocking material as evidence for success • Known and unknown factors responsible for failure - barriers - mortality during downstream migration - poaching - ship propellers - mortality at sea • Trends and conclusion Criteria for the selection of a donor-strain • Geographic (and genetic) distance to the donor stream • Spawning time of the donor stock • Length of donor river • Timing of return of the donor stock yesterdays environment dictates • Availability of the source tomorrows adaptations (G. de LEANIZ) • Health status and restrictions In 2003/2004 the strategy of introducing mixed stocks in single tributaries was abandoned in favour of using the swedish Ätran strain (Middle Rhine) and french Allier (Upper Rhine) only. Transplanted strains keep their inherited spawning time in the new environment for many generations - spawning time is stock specific. The timing of reproduction ensures optimal timing of hatching and initial feeding for the offspring (Heggberget 1988) and is of selective importance Spawning time of non-native stocks in river Gudenau (Denmark) (G. Holdensgaard, DCV, unpublished data) and spawning time of the extirpated Sieg salmon (hist. records) A common garden experiment - spawning period (lines) and peak-spawning (boxes) of five introduced (= allochthonous) stocks returning to river Gudenau (Denmark) (n= 443) => the Ätran strain demonstrates the closest consistency with the ancient Sieg strain (Middle Rhine). -

Weiterentwicklung Des Bewertungsverfahrens "Hydrologische Güte" Als Expertensystem Zum Operationellen Einsatz Im Flussgebietsmanagement
Programm Lebensgrundlage Umwelt und ihre Sicherung (BWPLUS) Weiterentwicklung des Bewertungsverfahrens "Hydrologische Güte" als Expertensystem zum operationellen Einsatz im Flussgebietsmanagement Ch. Leibundgut, M. Eisele Institut für Hydrologie Universität Freiburg Förderkennzeichen: BWC 21013 Die Arbeiten des Programms Lebensgrundlage Umwelt und ihre Sicherung werden mit Mitteln des Landes Baden-Württemberg gefördert April 2005 Inhalt Zusammenfassung.........................................................................................1 Summary .......................................................................................................1 1 Einführung..................................................................................................2 2 Methodik ....................................................................................................3 3 Softwareentwicklung..................................................................................7 4 Anwendung in Baden-Württemberg ..........................................................9 5 Diskussion und Schlussfolgerungen ........................................................10 Literatur.......................................................................................................13 Anhang 1: Ergänzung zur Methodik.......................................................... A1 Anhang 2: Ergebnisse in Baden-Württemberg - Abbildungen.................. A3 Anhang 3: Ergebnisse in Baden-Württemberg – Tabellen ........................ A6 Zusammenfassung