TERRAFORMING MARS in a Climate of Existential Risk Keith Mansfield
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Martian Crater Morphology
ANALYSIS OF THE DEPTH-DIAMETER RELATIONSHIP OF MARTIAN CRATERS A Capstone Experience Thesis Presented by Jared Howenstine Completion Date: May 2006 Approved By: Professor M. Darby Dyar, Astronomy Professor Christopher Condit, Geology Professor Judith Young, Astronomy Abstract Title: Analysis of the Depth-Diameter Relationship of Martian Craters Author: Jared Howenstine, Astronomy Approved By: Judith Young, Astronomy Approved By: M. Darby Dyar, Astronomy Approved By: Christopher Condit, Geology CE Type: Departmental Honors Project Using a gridded version of maritan topography with the computer program Gridview, this project studied the depth-diameter relationship of martian impact craters. The work encompasses 361 profiles of impacts with diameters larger than 15 kilometers and is a continuation of work that was started at the Lunar and Planetary Institute in Houston, Texas under the guidance of Dr. Walter S. Keifer. Using the most ‘pristine,’ or deepest craters in the data a depth-diameter relationship was determined: d = 0.610D 0.327 , where d is the depth of the crater and D is the diameter of the crater, both in kilometers. This relationship can then be used to estimate the theoretical depth of any impact radius, and therefore can be used to estimate the pristine shape of the crater. With a depth-diameter ratio for a particular crater, the measured depth can then be compared to this theoretical value and an estimate of the amount of material within the crater, or fill, can then be calculated. The data includes 140 named impact craters, 3 basins, and 218 other impacts. The named data encompasses all named impact structures of greater than 100 kilometers in diameter. -

Appendix I Lunar and Martian Nomenclature
APPENDIX I LUNAR AND MARTIAN NOMENCLATURE LUNAR AND MARTIAN NOMENCLATURE A large number of names of craters and other features on the Moon and Mars, were accepted by the IAU General Assemblies X (Moscow, 1958), XI (Berkeley, 1961), XII (Hamburg, 1964), XIV (Brighton, 1970), and XV (Sydney, 1973). The names were suggested by the appropriate IAU Commissions (16 and 17). In particular the Lunar names accepted at the XIVth and XVth General Assemblies were recommended by the 'Working Group on Lunar Nomenclature' under the Chairmanship of Dr D. H. Menzel. The Martian names were suggested by the 'Working Group on Martian Nomenclature' under the Chairmanship of Dr G. de Vaucouleurs. At the XVth General Assembly a new 'Working Group on Planetary System Nomenclature' was formed (Chairman: Dr P. M. Millman) comprising various Task Groups, one for each particular subject. For further references see: [AU Trans. X, 259-263, 1960; XIB, 236-238, 1962; Xlffi, 203-204, 1966; xnffi, 99-105, 1968; XIVB, 63, 129, 139, 1971; Space Sci. Rev. 12, 136-186, 1971. Because at the recent General Assemblies some small changes, or corrections, were made, the complete list of Lunar and Martian Topographic Features is published here. Table 1 Lunar Craters Abbe 58S,174E Balboa 19N,83W Abbot 6N,55E Baldet 54S, 151W Abel 34S,85E Balmer 20S,70E Abul Wafa 2N,ll7E Banachiewicz 5N,80E Adams 32S,69E Banting 26N,16E Aitken 17S,173E Barbier 248, 158E AI-Biruni 18N,93E Barnard 30S,86E Alden 24S, lllE Barringer 29S,151W Aldrin I.4N,22.1E Bartels 24N,90W Alekhin 68S,131W Becquerei -

Art to the Stars: an Historical Perspective on Space Art... Arthur
Art to the Stars: an Historical Perspective on Space Art... Arthur Woods * Most people are probably not aware that the idea of space exploration began in the mind of the artist or that artists have been intimately involved in space exploration from the beginning. Yet long before the first rocket penetrated the atmosphere, artists were making the concept of humanity traveling beyond Earth’s atmosphere a reality. Both a scientific treatise on lunar astronomy and a remarkably foresighted science- fiction story about a voyage to the moon, Johann Kepler’s Somnium, written in 1634, is considered to be the first science fiction book about space. It accurately stated that that the Earth’s atmosphere becomes gradually thinner as one travels further from the planet. Since the first use of the telescope in 1610 and before the invention of the camera, astronomers recorded their observations of the heavens by making drawings of their observations. An early example would be the sketch of the Whirlpool Galaxy made by William Parsons in 1845 who had just constructed the world’s largest telescope. In the mid-nineteenth century artists De Montant, A. De Neuville andEmile Bayard created woodcuts to illustrate Jules Verne's "From the Earth to the Moon" (1865) and his sequel "Around the Moon". A few years later, James Nasmyth's illustrations were the first space landscapes to appear in a non-fiction book: "The Moon". Perhaps the most notable artwork depicting the night sky from this period would be Vincent van Gogh’s Starry Night painted in 1889. Considered to be one of his greatest works, it depicts the view outside his sanitarium room window at night, although it was painted from memory during the day. -

Moonstruck: How Realistic Is the Moon Depicted in Classic Science Fiction Films?
MOONSTRUCK: HOW REALISTIC IS THE MOON DEPICTED IN CLASSIC SCIENCE FICTION FILMS? DONA A. JALUFKA and CHRISTIAN KOEBERL Institute of Geochemistry, University of Vienna. Althanstrasse 14, A-1090 Vienna, Austria (E-mail: [email protected]; [email protected]) Abstract. Classical science fiction films have been depicting space voyages, aliens, trips to the moon, the sun, Mars, and other planets, known and unknown. While it is difficult to critique the depiction of fantastic places, or planets about which little was known at the time, the situation is different for the moon, about which a lot of facts were known from astronomical observations even at the turn of the century. Here we discuss the grade of realism with which the lunar surface has been depicted in a number of movies, beginning with George Méliès’ 1902 classic Le Voyage dans la lune and ending, just before the first manned landing on the moon, with Stanley Kubrick’s 2001: A Space Odyssey. Many of the movies present thoughtful details regarding the actual space travel (rockets), but none of the movies discussed here is entirely realistic in its portrayal of the lunar surface. The blunders range from obvious mistakes, such as the presence of a breathable atmosphere, or spiders and other lunar creatures, to the persistent vertical exaggeration of the height and roughness of lunar mountains. This is surprising, as the lunar topography was already well understood even early in the 20th century. 1. Introduction Since the early days of silent movies, the moon has often figured prominently in films, but mainly as a backdrop for a variety of more or (most often) less well thought-out plots. -

About the Authors
About the Authors Kevin H. Baines is a planetary scientist at the CalTech/Jet Propulsion Laboratory (JPL) in Pasadena, California and at the Space Science and Engineering Center at the University of Wisconsin-Madison. As a NASA-named science team member on the Galileo mission to Jupiter, the Cassini/Huygens mission to Saturn, and the Venus Express mission to Venus, he has explored the composition, structure and dynamic meteorology of these planets, discover- ing in the process the northern vortex on Saturn, a jet stream on Venus, the fi rst spectroscopi- cally-identifi able ammonia clouds on both Jupiter and Saturn, and the carbon-soot-based thunderstorm clouds of Saturn. He also was instrumental in discovering that the global envi- ronmental disaster caused by sulfuric acid clouds unleashed by the impact of an asteroid or comet some 65 million years ago was a root cause of the extinction of the dinosaurs. In 2006, he also re-discovered Saturn’s north polar hexagon—last glimpsed upon its discovery by Voyager in 1981—which in 2011 Astronomy magazine declared the third “weirdest object in the cosmos”. When not studying the skies and clouds of our neighboring planets, Kevin can often be found fl ying within those of the Earth as an avid FAA-certifi ed fl ight instructor, hav- ing logged over 8,000 h (nearly a full year) of fl ight time instructing engineers, scientists and even astronauts in the JPL/Caltech community. Jeffrey Bennett is an astrophysicist who has taught at every level from preschool through gradu- ate school. He is the lead author of college-level textbooks in astronomy, astrobiology, mathemat- ics, and statistics that together have sold more than one million copies. -

Spaceflight a British Interplanetary Society Publication
SpaceFlight A British Interplanetary Society publication Volume 61 No.6 June 2019 £5.25 Who’ll track them? Scotland’s DSRS faced with closure Reversing the future 06> Course corrections 634089 Reflections on Apollo 770038 Red Planet whirlybird 9 CONTENTS Features 12 Reinventing the future SpaceFlight takes a long hard look at current NASA plans for getting boots on the Moon, finding President Trump’s clamour for a 2024 target date to be unrealistic. 2 18 Course Correction Letter from the Editor Former NASA contractor on the Apollo programme Pat Norris shares his experiences of We have a rich mixture this month, ensuring that NASA got its Apollo spacecraft on including a review of NASA’s plan course for the Moon – accurately! to put boots on the Moon. But we find fault with the call for a landing within the next five years, seeing 22 Apollo 10 – so near, yet so far instead why a more modestly- In the final instalment to his trilogy on the paced effort will bring along the meaning of Apollo, Nick Spall FBIS looks at the commercial New Space brigade environmental and cultural aspects of this while easing the budget for a historic venture, 50 years on. 12 cash-strapped NASA. But Apollo continues to attract 28 Mars Whirlybird interest as we close in on 50 years The Editor takes a look at what could turn out to since the first landing by be a seminal shift in rover support for Mars astronauts, considering the legacy of the programme on our broader exploration as NASA gives the green light to the perspective of the Earth and its first helicopter designed for the Red Planet. -

How Astronomical Objects Are Named
How Astronomical Objects Are Named Jeanne E. Bishop Westlake Schools Planetarium 24525 Hilliard Road Westlake, Ohio 44145 U.S.A. bishop{at}@wlake.org Sept 2004 Introduction “What, I wonder, would the science of astrono- use of the sky by the societies of At the 1988 meeting in Rich- my be like, if we could not properly discrimi- the people that developed them. However, these different systems mond, Virginia, the Inter- nate among the stars themselves. Without the national Planetarium Society are beyond the scope of this arti- (IPS) released a statement ex- use of unique names, all observatories, both cle; the discussion will be limited plaining and opposing the sell- ancient and modern, would be useful to to the system of constellations ing of star names by private nobody, and the books describing these things used currently by astronomers in business groups. In this state- all countries. As we shall see, the ment I reviewed the official would seem to us to be more like enigmas history of the official constella- methods by which stars are rather than descriptions and explanations.” tions includes contributions and named. Later, at the IPS Exec- – Johannes Hevelius, 1611-1687 innovations of people from utive Council Meeting in 2000, many cultures and countries. there was a positive response to The IAU recognizes 88 constel- the suggestion that as continuing Chair of with the name registered in an ‘important’ lations, all originating in ancient times or the Committee for Astronomical Accuracy, I book “… is a scam. Astronomers don’t recog- during the European age of exploration and prepare a reference article that describes not nize those names. -

IAAA Welcome Pack Brochure
TABLE OF CONTENTS Welcome to the IAAA! 1. THE HISTORY OF THE IAAA 1 2. THE AIMS OF THE IAAA — The IAAA Manifesto 6 3. AN INTRODUCTION TO ASTRONOMICAL ART by David A Hardy 7 4. OBLIGATIONS OF IAAA MEMBERS 10 5. THE BENEFITS OF IAAA MEMBERSHIP 11 6. PROFESSIONAL GUIDELINES 12 Copyright 2000 International Association of Astronomical Artists. All rights reserved. The illustrations in this brochure represent a juried selection of IAAA members’ artwork. The copyright for each piece of artwork is retained by the individual artists. For more information about the IAAA, please visit our website at www.iaaa.org Welcome to the IAAA! We are a small band of artists whose common bond is the visualization of astronomy, space science and humanity’s role in space. We work in a variety of media and incorporate a range of styles and visions, but infuse in our work a mandate for scientific accuracy. In the tradition of the painters of the Hudson River School, the Barbizons, and the artist/explorers of the American West, we seek to inspirationally portray the possibilities of the great endeavor of space exploration. We are truly an international group, linked together by the Internet, our bimonthly publication “Pulsar,” internation- al exhibitions, and our legendary IAAA workshops. The benefits of IAAA membership are many. Our fast-paced, online network, for example, links our members from many locations around the world, making it an invaluable tool in creating and maintaining strong group focus and camaraderie. Our IAAA website, http://www.iaaa.org, provides a wealth of valuable resources, such as a member directory, member biographies, links to members’ personal web- sites, and reports on exhibitions and past workshops IAAA workshops are usually held in “planetary” locales, chosen for their resemblance and proximity to otherworld- ly formations and features. -

Catalog for Space Art Exhibit
DESTINATION: MARS an exhibition of mars themed space art by artists of the international association of astronomical artists presented at the first international conference on the exploration of phobos and deimos SPONSORS THE CONFERENCE Mars Institute, Lunar and Planetary Institute, NASA Ames Research Centre National Aeronautics and Moffet Field, CA, USA Space Administration, 5 - 7 November, 2007 NASA Mars Program Office, Canadian Space Agency, European Space Agency, The First International Conference on the Exploration of Phobos and Space Research Institute of the Deimos: The Science, Robotic Reconnaissance, and Human Exploration of Russian Academy of Sciences, Planetary Science Institute, the Two Moons of Mars is the first international meeting focused on Phobos SETI Institute, and Deimos, and on how their exploration relates to that of the Moon, The Planetary Society Mars, and the solar system beyond. The conference is an open international forum bringing together scientists, engineers, space exploration professionals, CORPORATE SPONSORS and students interested in discussing the status and advancement of the The Boeing Company, exploration of Mars' satellites, and the exploration of Mars itself and other Firestar Engineering, near-Earth objects (NEOs) through them. Hamilton Sundstrand, Optech Incorporated IAAA ARTISTS Joe Bergeron, FIAAA THE EXHIBITION Richard Bizley, FIAAA Sean Brady The exhibition “Destination: Mars” was curated specifically for the Michael Carrol, FIAAA First International Conference on the Exploration of Phobos and Deimos. Robin Hart It features 26 Mars-themed artworks from 14 artists of the International William Hartmann, FIAAA Association of Astronomical Artists (IAAA). Gary Harwood, FIAAA Frank Hettick In this exhibition the visitor is invited to explore past, present, and future Steven Hobbs vistas of Mars and its moons, imagine scenarios of living and working on the B. -
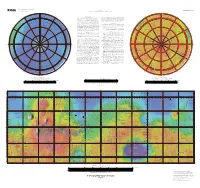
Topographic Map of Mars
U.S. DEPARTMENT OF THE INTERIOR OPEN-FILE REPORT 02-282 U.S. GEOLOGICAL SURVEY Prepared for the NATIONAL AERONAUTICS AND SPACE ADMINISTRATION 180° 0° 55° –55° Russell Stokes 150°E NOACHIS 30°E 210°W 330°W 210°E NOTES ON BASE smooth global color look-up table. Note that the chosen color scheme simply 330°E Darwin 150°W This map is based on data from the Mars Orbiter Laser Altimeter (MOLA) 30°W — 60° represents elevation changes and is not intended to imply anything about –60° Chalcoporous v (Smith and others 2001), an instrument on NASA’s Mars Global Surveyor Milankovic surface characteristics (e.g. past or current presence of water or ice). These two (MGS) spacecraft (Albee and others 2001). The image used for the base of this files were then merged and scaled to 1:25 million for the Mercator portion and Rupes map represents more than 600 million measurements gathered between 1999 1:15,196,708 for the two Polar Stereographic portions, with a resolution of 300 and 2001, adjusted for consistency (Neumann and others 2001 and 2002) and S dots per inch. The projections have a common scale of 1:13,923,113 at ±56° TIA E T converted to planetary radii. These have been converted to elevations above the latitude. N S B LANI O A O areoid as determined from a martian gravity field solution GMM2 (Lemoine Wegener a R M S s T u and others 2001), truncated to degree and order 50, and oriented according to IS s NOMENCLATURE y I E t e M i current standards (see below). -
Smithsonian Miscellaneous Collections
SMITHSONIAN MISCELLANEOUS COLLECTIONS VOLUME 76. NUMBER 9 THE BRIGHTNESS OF LUNAR ECLIPSES 1860-1922 BY WILLARD J. FISHER (Publication 2751) CITY OF WASHINGTON PUBLISHED BY THE SMITHSONIAN INSTITUTION FEBRUARY 18, 1924 BALTIMORE, MD., II. S. A. THE BRIGHTNESS OF LUNAR ECLIPSES 1860-1922 By WILLARD J. FISHER After Struve and Dollen had pointed out the advantages in observ- ing occultations of faint stars during lunar total eclipses, and had circulated data facilitating the observations, there was an interest aroused among professional astronomers, who paid much attention to eclipse occultations for a considerable time ; but only a few, as Flammarion, Barnard, M. Wolf, paid much regard to lunar eclipse phenomena in relation to the earth's atmosphere. The observation and description of the peculiarities of the earth's shadow, both before and after the occupation campaign, was largely left to amateurs. The organization and growth of great societies, like the Societe Astronomique de France and the British Astronomical Association, have greatly increased the number of such observers and the volume of the recorded observations. The present paper was undertaken with the expectation that in the mass of lunar eclipse literature there would be found evidence of a structure of the earth's shadow corresponding to the known dust layers of the atmosphere.'' It was found that this object could not immediately be attained ; rather, it seemed desirable first to study the brightness of recorded eclipses. This, to be sure, has been done by A. Danjon,^ in papers in which, from a study of records going back to 1583, he has drawn the conclusion that there is a remarkable relation between the solar cycle and the brightness of lunar eclipses, mostly total. -
Thedatabook.Pdf
THE DATA BOOK OF ASTRONOMY Also available from Institute of Physics Publishing The Wandering Astronomer Patrick Moore The Photographic Atlas of the Stars H. J. P. Arnold, Paul Doherty and Patrick Moore THE DATA BOOK OF ASTRONOMY P ATRICK M OORE I NSTITUTE O F P HYSICS P UBLISHING B RISTOL A ND P HILADELPHIA c IOP Publishing Ltd 2000 All rights reserved. No part of this publication may be reproduced, stored in a retrieval system or transmitted in any form or by any means, electronic, mechanical, photocopying, recording or otherwise, without the prior permission of the publisher. Multiple copying is permitted in accordance with the terms of licences issued by the Copyright Licensing Agency under the terms of its agreement with the Committee of Vice-Chancellors and Principals. British Library Cataloguing-in-Publication Data A catalogue record for this book is available from the British Library. ISBN 0 7503 0620 3 Library of Congress Cataloging-in-Publication Data are available Publisher: Nicki Dennis Production Editor: Simon Laurenson Production Control: Sarah Plenty Cover Design: Kevin Lowry Marketing Executive: Colin Fenton Published by Institute of Physics Publishing, wholly owned by The Institute of Physics, London Institute of Physics Publishing, Dirac House, Temple Back, Bristol BS1 6BE, UK US Office: Institute of Physics Publishing, The Public Ledger Building, Suite 1035, 150 South Independence Mall West, Philadelphia, PA 19106, USA Printed in the UK by Bookcraft, Midsomer Norton, Somerset CONTENTS FOREWORD vii 1 THE SOLAR SYSTEM 1