Copyrighted Material
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Swing-Away Conveyor Assembly Manual
Swing Away Conveyor Portable Grain Belt Conveyor Assembly Manual This manual applies to the following brands and models: Batco, Westfield WCX, and Hutchinson HCX: 2000 Series: 2065SA, 2075SA, 2085SA, 2095SA, 20105SA, 20110SA, 20120SA 2400 Series: 2465SA, 2475SA, 2485SA, 2495SA, 24105SA, 24110SA, 24120SA Original Instructions Read this manual before using product. Failure to Part Number: P1512114 R6 follow instructions and safety precautions can Revised: November 2018 result in serious injury, death, or property damage. Keep manual for future reference. New in this Manual The following changes have been made in this revision of the manual: Description Section Important note about using a second “Square Section 3.7. – Install the Spout Roller and Hex Roller washer”. on page 22 SWING AWAY CONVEYOR – PORTABLE GRAIN BELT CONVEYOR CONTENTS 1. Safety....................................................................................................................................................... 5 1.1. Safety Alert Symbol and Signal Words..................................................................................... 5 1.2. General Product Safety ............................................................................................................ 5 1.3. Moving Conveyor Belt Safety................................................................................................... 6 1.4. Rotating Parts Safety................................................................................................................ 6 1.5. Drives -
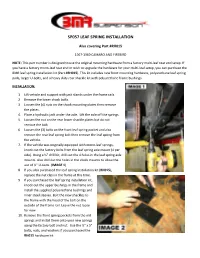
Sp057 Leaf Spring Installation
SP057 LEAF SPRING INSTALLATION Also covering Part #RH015 1967-1969 CAMARO AND FIREBIRD NOTE: This part number is designed to use the original mounting hardware from a factory multi-leaf rear end setup. If you have a factory mono-leaf rear end or wish to upgrade the hardware for your multi-leaf setup, you can purchase the BMR leaf spring installation kit (Part #RH015). This kit includes new front mounting hardware, polyurethane leaf spring pads, larger U-bolts, and a heavy duty rear shackle kit with polyurethane frame bushings. INSTALLATION: 1. Lift vehicle and support with jack stands under the frame rails. 2. Remove the lower shock bolts. 3. Loosen the (4) nuts on the shock mounting plates then remove the plates. 4. Place a hydraulic jack under the axle. Lift the axle off the springs. 5. Loosen the nut on the rear lower shackle plates but do not remove the bolt. 6. Loosen the (3) bolts on the front leaf spring pocket and also remove the rear leaf spring bolt then remove the leaf spring from the vehicle. 7. If the vehicle was originally equipped with mono-leaf springs, knock out the factory bolts from the leaf spring axle mount (4 per side). Using a ½” drill bit, drill out the 4 holes in the leaf spring axle mounts. Also drill out the holes in the shock mounts to allow the use of ½” U-bolts. (IMAGE 1) 8. If you also purchased the leaf spring installation kit (RH015), replace the nut clips in the frame at this time. 9. If you purchased the leaf spring installation kit, knock out the upper bushings in the frame and install the supplied polyurethane bushings and inner steel sleeves. -
Suspension Geometry and Computation
Suspension Geometry and Computation By the same author: The Shock Absorber Handbook, 2nd edn (Wiley, PEP, SAE) Tires, Suspension and Handling, 2nd edn (SAE, Arnold). The High-Performance Two-Stroke Engine (Haynes) Suspension Geometry and Computation John C. Dixon, PhD, F.I.Mech.E., F.R.Ae.S. Senior Lecturer in Engineering Mechanics The Open University, Great Britain. This edition first published 2009 Ó 2009 John Wiley & Sons Ltd Registered office John Wiley & Sons Ltd, The Atrium, Southern Gate, Chichester, West Sussex, PO19 8SQ, United Kingdom For details of our global editorial offices, for customer services and for information about how to apply for permission to reuse the copyright material in this book please see our website at www.wiley.com. The right of the author to be identified as the author of this work has been asserted in accordance with the Copyright, Designs and Patents Act 1988. All rights reserved. No part of this publication may be reproduced, stored in a retrieval system, or transmitted, in any form or by any means, electronic, mechanical, photocopying, recording or otherwise, except as permitted by the UK Copyright, Designs and Patents Act 1988, without the prior permission of the publisher. Wiley also publishes its books in a variety of electronic formats. Some content that appears in print may not be available in electronic books. Designations used by companies to distinguish their products are often claimed as trademarks. All brand names and product names used in this book are trade names, service marks, trademarks or registered trademarks of their respective owners. The publisher is not associated with any product or vendor mentioned in this book. -

EZT® Integrated Zero-Turn Transaxle Service and Repair Manual (ZC & ZD Models)
EZT® Integrated Zero-Turn Transaxle Service and Repair Manual (ZC & ZD Models) BLN-52622 December 2008 TABLE OF CONTENTS Section Page Foreword .............................................................................................................................. 1 Description and Operation ................................................................................................. 2 Introduction .................................................................................................................................................. 2 General Description ..................................................................................................................................... 2 Hydraulic Schematic .................................................................................................................................... 3 External Features -EZT® ......................................................................................................................... 4 Technical Specifi cations ............................................................................................................................... 5 Product Identifi cation ................................................................................................................................... 5 Safety .................................................................................................................................... 6 Personal Safety ........................................................................................................................................... -

Adaption and Evaluation of Transversal Leaf Spring Suspension Design for a Lightweight Vehicle Using Adams /C Ar
ADAPTION AND EVALUATION OF TRANSVERSAL LEAF SPRING SUSPENSION DESIGN FOR A LIGHTWEIGHT VEHICLE USING ADAMS /C AR FLORIAN CHRIST Master Thesis in Vehicle Engineering Vehicle Dynamics Aeronautical and Vehicle Engineering Royal Institute of Technology TRITA-AVE 2015:09 ISSN 1651-7660 Adaption and Evaluation of Transversal Leaf Spring Suspension Design for a Lightweight Vehicle using Adams/Car FLORIAN CHRIST © Florian Christ, 2015. Vehicle Dynamics Department of Aeronautical and Vehicle Engineering Kungliga Tekniska Högskolan SE-100 44 Stockholm Sweden ii Abstract This investigation deals with the suspension of a lightweight medium-class vehicle for four passengers with a curb weight of 1000 kg. The suspension layout consists of a transversal leaf spring and is supported by an active air spring which is included in the damper. The lower control arms are replaced by the leaf spring ends. Active ride height control is introduced to compensate for different vehicle load states. Active steering is applied using electric linear actuators with steer-by wire design. Besides intense use of light material the inquiry should investigate whether elimination of suspension parts or a lighter component is concordant with the stability demands of the vehicle. The investigation is based on simulations obtained with MSC Software ADAMS/Car and Matlab. The suspension is modeled in Adams/Car and has to proof it's compliance in normal driving conditions and under extreme forces. Evaluation criteria are suspension kinematics and compliance such as camber, caster and toe change during wheel travel in different load states. Also the leaf spring deflection, anti-dive and anti-squat measures and brake force distribution are investigated. -

Caster Camber Tire-Wear Angles
BASIC WHEEL ALIGNMENT odern steering and ples. Therefore, let’s review these basic the effort needed to turn the wheel. suspension systems alignment angles with an eye toward Power steering allows the use of more are great examples of typical complaints and troubleshooting. positive caster than would be accept- solid geometry at able with manual steering. work. Wheel align- Caster Too little caster can make steering ment integrates all the factors of steer- Caster is the tilt of the steering axis of unstable and cause wheel shimmy. Ex- Ming and suspension geometry to pro- each front wheel as viewed from the tremely negative caster and the related vide safe handling, good ride quality side of the vehicle. Caster is measured shimmy can contribute to cupped wear and maximum tire life. in degrees of an angle. If the steering of the front tires. If caster is unequal Front wheel alignment is described axis tilts backward—that is, the upper from side to side, the vehicle will pull in terms of angles formed by steering ball joint or strut mounting point is be- toward the side with less positive (or and suspension components. Tradi- hind the lower ball joint—the caster more negative) caster. Remember this tionally, five alignment angles are angle is positive. If the steering axis tilts when troubleshooting a complaint of checked at the front wheels—caster, forward, the caster angle is negative. vehicle pull or wander. camber, toe, steering axis inclination Caster is not measured for rear wheels. (SAI) and toe-out on turns. When we Caster affects straightline stability Camber move from two-wheel to four-wheel and steering wheel return. -

Aut 221 Automatic Transmission/Transaxle
AUT 221 (A2) AUTOMATIC TRANSMISSION/TRANSAXLE Prerequisites: TRN 120 Corequisites: None COURSE DESCRIPTION: This course covers operation, diagnosis, service, and repair of automatic transmissions/transaxles. Topics include hydraulic, pneumatic, mechanical, and electrical/electronic operation of automatic drive trains and the use of appropriate service tools and equipment. Upon completion, students should be able to explain operational theory and diagnose and repair automatic drive trains. Course Hours per Week: Class, 2; Lab Hours, 3; Semester Hours Credits, 3. SAFETY DISCLAIMER: Automotive work presents many hazards. A moment’s carelessness can cause injury to oneself or to others. Such mishaps can occur quickly due, in part, to the nature of the industrial tools used in automotive work. The weight of automobiles and the equipment used to fix them can even cause fatal injuries. Therefore, great care must always be taken in checking out equipment before use, and in using that equipment to work on automobiles. As we work to insure the safety of everyone in the Durham Tech automotive lab, it is the instructor’s responsibility to introduce students to equipment and to advise them on its safe operation. Those health and safety procedures are also presented in each textbook for each course in the automotive program. Students are responsible for mastery of that safety information. Durham Tech holds each student in every class responsible for reading and applying all of the information regarding personal and public safety and personal and public health in the required text. While working in the Durham Tech automotive lab, safety glasses must be worn by everyone. -
Wheel Alignment Simplified
The WHAT and WHY of Toe Caster - Camber Kingpin Inclination - Thrust Angle Steering Angle – Wheel setback WHEEL ALIGNMENT SIMPLIFIED Wheel alignment is often considered complicated and hard to understand In the days of the rigid chassis construction with solid axles, when tyres were poor and road speeds were low, wheel alignment was simply a matter of ensuring that the wheels rolled along the road in parallel paths. This was easily accomplished by means of using a toe gauge or simple tape measure. The steering wheel could then also simply be repositioned on the splines of the steering shaft. Camber and Caster was easily adjustable by means of shims. Today wheel alignment is of course more sophisticated as there are several angles to consider when doing wheel alignment on the modern vehicle with Independent suspension systems, good performing tyres and high road speeds. Below are the most common angles and their terminology and for the correction of wheel alignment and the diagnoses thereof, the understanding of the principals of these angles will become necessary. Doing the actual corrections of wheel alignment is a fairly simple task and in many instances it is easily accomplished by some mechanical adjustments. However Wheel Alignment diagnosis is not so straightforward and one will need to understand the interaction between the wheel alignment angles as well as the influence the various angles have on each other. In addition there are also external factors one will need to consider. Wheel Alignment Specifications are normally given in angular values of degrees and minutes A circle consists of 360 segments called DEGREES, symbolized by the indicator ° Each DEGREE again has 60 segments called MINUTES symbolized by the indicator ‘. -

Instructions for M-Xxxx-Xxxx
M-9602-M Spring and Stabilizer Bar Kit w/ MagneRide Calibration NO PART OF THIS DOCUMENT MAY BE REPRODUCED WITHOUT PRIOR AGREEMENT AND WRITTEN PERMISSION OF FORD PERFORMANCE PARTS Please visit www. performanceparts.ford.com for the most current instruction and warranty information. PLEASE READ ALL OF THE FOLLOWING INSTRUCTIONS CAREFULLY PRIOR TO INSTALLATION. AT ANY TIME YOU DO NOT UNDERSTAND THE INSTRUCTIONS, PLEASE CALL THE FORD PERFORMANCE TECHLINE AT 1-800-367-3788 M-9602-M is designed for 2018+ Mustangs equipped with MagneRide and includes a unique MagneRide calibration that is loaded with the included Procal voucher and software. Please reference the instruction tab on the Procal and make sure you use version 3.9+ Kit Includes: Front Stabilizer Bar Front Springs Rear Stabilizer Bar Rear Springs MagneRide Tuning Calibration Front Stabilizer Bar Removal NOTICE: Suspension fasteners are critical parts that affect the performance of vital components and systems. Failure of these fasteners may result in major service expense. Use the same or equivalent parts if replacement is necessary. Do not use a replacement part of lesser quality or substitute design. Tighten fasteners as specified. 1. Remove all 4 wheels and tires and set aside. 2. On both sides. 1. NOTE: The stabilizer bar links are designed with low friction ball joints that have a low breakaway torque. NOTE: Use the hex-holding feature to prevent the ball stud from turning while removing the stabilizer bar link nut. Remove and the front stabilizer bar link lower nut. 2. Position aside the front stabilizer bar link. Factory Ford shop manuals are available from Helm Publications, 1-800-782-4356 Techline 1-800-367-3788 Page 1 of 41 IS-1850-0631 M-9602-M Spring and Stabilizer Bar Kit w/ MagneRide Calibration NO PART OF THIS DOCUMENT MAY BE REPRODUCED WITHOUT PRIOR AGREEMENT AND WRITTEN PERMISSION OF FORD PERFORMANCE PARTS 4. -

Schaeffler Symposium 2018
2018 Schaeffler Symposium 9/6/2018 Intelligent Active Roll Control INTELLIGENT ACTIVE ROLL CONTROL SHAUN TATE 1 2018 Schaeffler Symposium 9/6/2018 Intelligent Active Roll Control Production Experience & Awards Series Production – 12V BMW 7 Series 2015 BMW 5 Series 2017 RR Phantom 2018 Series Production – 48V Bentley Bentayga 2015 Audi SQ7 2016 Porsche Panamera 2017 Porsche Cayenne 2017 Bentley Continental 2018 Award‐Winning System German Innovation Award Vehicle Dynamics International Award Auto Test Sieger PACE Award 2016 2016 2016 2017 Feature to Product Mapping Stationary Ride Comfort Feature Adaptive Suspension Setup Agility & Stability Conditions Improvement Control Response Clearance Vertical Acceleration Exit Base Stability / Roll Leveling Acceleration Steering Products ‐ Easy Loading Easy Entry Easy Parking Adapt Ground Adapt Wheel Increase Articulation Load Reduce Acceleration Reduce Lateral Reduce Yaw Adapt Self Adapt Steering Dynamic Body Trailer iARC 2 2018 Schaeffler Symposium 9/6/2018 Intelligent Active Roll Control Market Trends & Features Trend 3: Large Trucks/SUVs/Vans for improved comfort and more safety Weight Trend 2: HEV/EV for improved comfort and system availability Vehicle Trend 1: SUV for improved comfort and agility Vehicle Center of Gravity Selling Features Using Schaeffler iARC System Feature Driving Dynamics Comfort Features ADAS Support L3 / Active Safety ‐ Roll Into m Lane Mode ‐ Self Steering Yaw Ride Stability Body Tilt Control Control Emergency Split Free Speed Road Vehicle Class ‐ Stability Active Control -

Product Information Sheet Steering and Suspension System Trainer
Product Information Sheet Steering and Suspension System Trainer This real component trainer provides the instructor with a . Remove, inspect, and install coil springs and spring working light vehicle steering and suspension system for insulators. group or whole-class demonstration. Inspect, replace, and adjust track rod ends, track rod sleeves, and clamps. This includes all the individual components of the system . Remove, inspect, and install upper and lower wishbones, presented on a moveable, steel frame so that each bushes, shafts, and rebound bumpers. component can be clearly identified. Remove, inspect, and install hub carrier assemblies. Inspect, remove, and replace dampers. The system comprises front wheel assemblies, MacPherson strut and coil spring assemblies, road wheels and power Items Included: steering rack. Trainer (right-hand and left-hand drive options available) . The trainer can also be used in conjunction with our Other Items Required: optional cloud-based software, which offers online practical tasks as well as interactive theory presentations, . Automotive workshop tools investigations, and assessments, which link directly to the . AC supply outlet (110V/230V options available) practical activities carried out using this resource. General Information: Trainer Enables Demonstrations of the Following: Trainer Dimensions (W x D x H): . Introduce the steering and suspension system trainer. 1750 x 1250 x 1500 mm / 69 x 49 x 59 inches . Inspect steering shaft universal joint, flexible coupling, Packed Volume: Approx. 3.67m3 / 130ft3 collapsible column, lock cylinder mechanism, and Packed Weight: Approx. 360kg / 795lb steering wheel. Packed Dimensions (W x D x H): . Disassemble, inspect, and reassemble rack and pinion 1904 x 1244 x 1550 mm / 75 x 49 x 62 inches steering gear. -

September-October 2020
news & features September-October 2020 Special Event Barrett-Jackson Online Only July auction results ............5 With the live auction calendar disrupted by quarantine, Barrett- Jackson promptly moved their efforts online—with great results. New Vehicle Introduction 2021 Ford Bronco 2-Door / 4-Door / Bronco Sport............10 “One of the most highly anticipated” may be overused, but it’s undeniably appropriate for this one, requested by customers for years, feeding the rumor mill for years, and finally here. A Week With 2020 Buick Encore GX Essence FWD ................................15 New Vehicle Introductions 2020/2021 Dodge//SRT 700+ hp performance lineup ........16 Dodge has the vehicles. SRT has the power and tech. And they’ve just come up with three significant new combinations of the two. ARIZONA BOATER MAGAZINE Lamborghini 63: Supercar of the Seas...............................19 New Vehicle Introduction 2021 Ram 1500 TRX ............................................................20 Not to be outdone in red hot battles for supremacy in off-roading, nor in power and performance, Ram reveals a new over-the-top pickup that sets the bar at new highs for all of the above. Special Events Monterey / Pebble Beach 2020: updates/auctions A ....24 New Vehicle Introduction 2021 Kia K5..........................................................................27 Gone is the hot-selling Kia Optima. Here to replace it is the Kia K5. Road Trip 2020 Acura TLX PMC Edition: 3000-mile pizza run B.....28 With a new Acura special edition in hand,