Actuator 2006: Ultrasonic Piezoelectric Motor
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Research and Development of a High-Resolution Piezoelectric Rotary Stage
KAUNAS UNIVERSITY OF TECHNOLOGY IGNAS GRYBAS RESEARCH AND DEVELOPMENT OF A HIGH-RESOLUTION PIEZOELECTRIC ROTARY STAGE Doctoral Dissertation Technological Sciences, Mechanical Engineering (09T) 2017, Kaunas This doctoral dissertation was prepared at Kaunas University of Technology, Institute of Mechatronics during the period of 2013–2017. The studies were supported by the Research Council of Lithuania. Scientific Supervisor: Habil. Dr. Algimantas Bubulis, (Kaunas University of Technology, Technological Sciences, Mechanical Engineering, 09T). Doctoral dissertation has been published in: http://ktu.edu Editor: Dovilė Dumbrauskaitė (Publishing Office “Technologija”) © I. Grybas, 2017 ISBN xxxx-xxxx The bibliographic information about the publication is available in the National Bibliographic Data Bank (NBDB) of the Martynas Mažvydas National Library of Lithuania KAUNO TECHNOLOGIJOS UNIVERSITETAS IGNAS GRYBAS AUKŠTOS SKYROS PJEZOELEKTRINIO SUKAMOJO STALIUKO KŪRIMAS IR TYRIMAS Daktaro disertacija Technologiniai mokslai, mechanikos inžinerija (09T) 2017, Kaunas Disertacija rengta 2013–2017 metais Kauno technologijos universiteto Mechatronikos institute. Mokslinius tyrimus rėmė Lietuvos mokslo taryba. Mokslinis vadovas: Habil. dr. Algimantas Bubulis (Kauno technologijos universitetas, technologiniai mokslai, mechanikos inžinerija, 09T). Interneto svetainės, kurioje skelbiama disertacija, adresas: http://ktu.edu Redagavo: Dovilė Dumbrauskaitė (leidykla “Technologija“) © I. Grybas, 2017 ISBN xxxx-xxxx Leidinio bibliografinė informacija pateikiama -

A Review of Application and Development Trends in Ultrasonic Motors
ES Mater. Manuf., 2021, 12, 3-16 ES Materials and Manufacturing DOI: https://dx.doi.org/10.30919/esmm5f933 A Review of Application and Development Trends in Ultrasonic Motors Xiaoniu Li, Zhiyi Wen, Botao Jia, Teng Cao, De Yu and Dawei Wu* Abstract The structure and performance of ultrasonic motors have gradually improved with the emergence of new materials, techniques, and structural forms. Therefore, the application scope of this technology is also expanding, especially in the field of high-end equipment. This paper conducts a review of research on the application status and progress at the frontier of research on ultrasonic motors. A summary and classification of both the status of application and cutting-edge research progress are presented, including the use of ultrasonic motors in aerospace, precision, biomedical and optical engineering and the influence on ultrasonic motor design resulting from the breakthrough in advanced processing and preparation technology, structural and functional integration technology, low voltage drives and open-loop control systems. Moreover, the performance of products developed with the aid of ultrasonic motors and representative devices are compared; and state of the art ultrasonic motor designs are discussed and summarized. Finally, potential future research efforts and prospects are highlighted. Keywords: Ultrasonic motors; applications; research progress; piezoelectric ceramics. Received date: 26 October 2020; Accepted date: 3 December 2020. Article type: Review article. 1. Introduction piezoelectric ceramics, micro-electro-mechanical systems Ultrasonic motors (USMs) involve the use of inverse (MEMS) micro-machining and 3D printing additive piezoelectric effects in piezoelectric ceramic materials to manufacturing technology.[10,11] generate rotation or linear motion by controlling the Until now, such advantages have enabled successful mechanical deformation. -

Meshing Drive Mechanism of Double Traveling Waves for Rotary Piezoelectric Motors
mathematics Article Meshing Drive Mechanism of Double Traveling Waves for Rotary Piezoelectric Motors Dawei An , Weiqing Huang *, Weiquan Liu, Jinrui Xiao, Xiaochu Liu and Zhongwei Liang School of Mechanical and Electrical Engineering, Guangzhou University, Guangzhou 510006, China; [email protected] (D.A.); [email protected] (W.L.); [email protected] (J.X.); [email protected] (X.L.); [email protected] (Z.L.) * Correspondence: [email protected] Abstract: Rotary piezoelectric motors based on converse piezoelectric effect are very competitive in the fields of precision driving and positioning. Miniaturization and larger output capability are the crucial design objectives, and the efforts on structural modification, new materials application and optimization of control systems are persistent but the effectiveness is limited. In this paper, the resonance rotor excited by stator is investigated and the meshing drive mechanism of double traveling waves is proposed. Based on the theoretical analysis of bending vibration, the finite element method (FEM) is used to compare the modal shape and modal response in the peripheric, axial, and radial directions for the stator and three rotors. By analyzing the phase offset and vibrational orientation of contact particles at the interface, the principle of meshing traveling waves is discussed graphically and the concise formula obtaining the output performance is summarized, which is analogous with the principles of gear connection. Verified by the prototype experimental results, the speed of the proposed motor is the sum of the velocity of the stator’s contact particle and the resonance rotor’s Citation: An, D.; Huang, W.; Liu, W.; contact particle, while the torque is less than twice the motor using the reference rotor. -

Piezoelectric Inertia Motors—A Critical Review of History, Concepts, Design, Applications, and Perspectives
Review Piezoelectric Inertia Motors—A Critical Review of History, Concepts, Design, Applications, and Perspectives Matthias Hunstig Grube 14, 33098 Paderborn, Germany; [email protected] Academic Editor: Delbert Tesar Received: 26 November 2016; Accepted: 18 January 2017; Published: 6 February 2017 Abstract: Piezoelectric inertia motors—also known as stick-slip motors or (smooth) impact drives—use the inertia of a body to drive it in small steps by means of an uninterrupted friction contact. In addition to the typical advantages of piezoelectric motors, they are especially suited for miniaturisation due to their simple structure and inherent fine-positioning capability. Originally developed for positioning in microscopy in the 1980s, they have nowadays also found application in mass-produced consumer goods. Recent research results are likely to enable more applications of piezoelectric inertia motors in the future. This contribution gives a critical overview of their historical development, functional principles, and related terminology. The most relevant aspects regarding their design—i.e., friction contact, solid state actuator, and electrical excitation—are discussed, including aspects of control and simulation. The article closes with an outlook on possible future developments and research perspectives. Keywords: inertia motor; stick-slip motor; smooth impact drive; piezeoelectric motor; review 1. Introduction Piezoelectric actuators have long been used in diverse applications, especially because of their short response time and high resolution. The major drawback of these solid state actuators in positioning applications is their small stroke: actuators made of state-of-the-art lead zirconate titanate (PZT) ceramics only reach strains up to 2 . A typical piezoelectric actuator with 10 mm length thus reaches a maximum stroke of only 20 µm.h Bending actuator designs [1] and other mechanisms [2] can increase the stroke at the expense of stiffness and actuation force ([3]; [4] (pp. -

Examination of High-Torque Sandwich-Type Spherical Ultrasonic Motor Using with High-Power Multimode Annular Vibrating Stator
actuators Article Examination of High-Torque Sandwich-Type Spherical Ultrasonic Motor Using with High-Power Multimode Annular Vibrating Stator Ai Mizuno 1,*, Koki Oikawa 1, Manabu Aoyagi 1,* ID , Hidekazu Kajiwara 1, Hideki Tamura 2 and Takehiro Takano 2 1 Graduate School of Engineering, Muroran Institute of Technology, 27-1, Mizumoto, Muroran, Hokkaido 050-8585, Japan; [email protected] (K.O.); [email protected] (H.K.) 2 Department of Information and Communication Engineering, Tohoku Institute of Technology, Sendai, Miyagi 982-8577, Japan; [email protected] (H.T.); [email protected] (T.T.) * Correspondence: [email protected] (A.M.); [email protected] (M.A.); Tel.: +81-143-46-5504 (M.A.) Received: 5 January 2018; Accepted: 20 February 2018; Published: 27 February 2018 Abstract: Spherical ultrasonic motors (SUSMs) that can operate with multiple degrees of freedom (MDOF) using only a single stator have high holding torque and high torque at low speed, which makes reduction gearing unnecessary. The simple structure of MDOF-SUSMs makes them useful as compact actuators, but their development is still insufficient for applications such as joints of humanoid robots and other systems that require MDOF and high torque. To increase the torque of a sandwich-type MDOF-SUSM, we have not only made the vibrating stator and spherical rotor larger but also improved the structure using three design concepts: (1) increasing the strength of all three vibration modes using multilayered piezoelectric actuators (MPAs) embedded in the stator, (2) enhancing the rigidity of the friction driving portion of the stator for transmitting more vibration force to the friction-driven rotor surface, and (3) making the support mechanism more stable. -

Development of a Linear Ultrasonic Motor with Segmented Electrodes
Development of a Linear Ultrasonic Motor with Segmented Electrodes by Jacky Ka Ki Lau A thesis submitted in conformity with the requirements for the degree of Master of Applied Science Graduate Department of Mechanical and Industrial Engineering University of Toronto © Copyright by Jacky Ka Ki Lau 2012 Development of a Linear Ultrasonic Motor with Segmented Electrodes Jacky Ka Ki Lau Master of Applied Science Graduate Department of Mechanical and Industrial Engineering University of Toronto 2012 ABSTRACT A novel segmented electrodes linear ultrasonic motor (USM) was developed. Using a planar vibration mode concept to achieve elliptical motion at the USM drive-tip, an attempt to decouple the components of the drive-tip trajectory was made. The proposed design allows greater control of the drive-tip trajectory without altering the excitation voltage. Finite element analyses were conducted on the proposed design to estimate the performance of the USM. The maximum thrust force and speed are estimated to be 46N and 0.5370m/s, respectively. During experimental investigation, the maximum thrust force and speed observed were 36N and 0.223m/s, respectively, at a preload of 70N. Furthermore, the smallest step achievable was 9nm with an 18µs impulse. Nevertheless, the proposed design allowed the speed of the USM to vary while keeping the thrust force relatively constant and allowed the USM to achieve high resolution without a major sacrifice of thrust force. ii Acknowledgements I would like to thank everyone who helped me in to the completion of my thesis and my Master’s program. Special mention goes to the following people and organizations: My supervisor, Professor Ridha Ben Mrad, for his guidance and support throughout my project. -
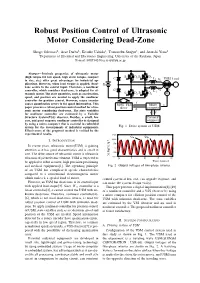
Robust Position Control of Ultrasonic Motor Considering Dead-Zone
Robust Position Control of Ultrasonic Motor Considering Dead-Zone Shogo Odomari1, Araz Darba1, Kosuke Uchida1, Tomonobu Senjyu1, and Atsushi Yona1 1Department of Electrical and Electronics Engineering, University of the Ryukyus, Japan E-mail: [email protected] Abstract— Intrinsic properties of ultrasonic motor (high torque for low speed, high static torque, compact S1 D1 S3 D3 C L1 USM Load in size, etc.) offer great advantages for industrial ap- 1 Va plications. However, when load torque is applied, dead- E zone occurs in the control input. Therefore, a nonlinear Vb y controller, which considers dead-zone, is adopted for ul- C2 L 2 trasonic motor. The state quantities, such as acceleration, S2 D2 S4 D4 RE speed, and position are needed to apply the nonlinear controller for position control. However, rotary encoder causes quantization errors in the speed information. This − f MOS FET Micro ye paper presents a robust position control method for ultra- driver φ computer sonic motor considering dead-zone. The state variables y for nonlinear controller are estimated by a Variable r e Structure System(VSS) observer. Besides, a small, low Personal cost, and good response nonlinear controller is designed computer by using a micro computer that is essential in embedded system for the developments of industrial equipments. Fig. 1 Drive system of USM. Effectiveness of the proposed method is verified by the experimental results. 150 Va Vb 100 I. INTRODUCTION B V , [V] 50 A In recent years, ultrasonic motor(USM) is gaining V 0 attention as it has good characteristics and is small in size. -

Modeling PM Rotary-Linear Motors with Twin-Stator Using 3D FEMM" (2010)
Louisiana State University LSU Digital Commons LSU Master's Theses Graduate School 2010 Modeling PM Rotary-Linear Motors with Twin- Stator Using 3D FEMM Oleksandr Dobzhanskyi Louisiana State University and Agricultural and Mechanical College, [email protected] Follow this and additional works at: https://digitalcommons.lsu.edu/gradschool_theses Part of the Electrical and Computer Engineering Commons Recommended Citation Dobzhanskyi, Oleksandr, "Modeling PM Rotary-Linear Motors with Twin-Stator Using 3D FEMM" (2010). LSU Master's Theses. 2519. https://digitalcommons.lsu.edu/gradschool_theses/2519 This Thesis is brought to you for free and open access by the Graduate School at LSU Digital Commons. It has been accepted for inclusion in LSU Master's Theses by an authorized graduate school editor of LSU Digital Commons. For more information, please contact [email protected]. MODELING PM ROTARY-LINEAR MOTORS WITH TWIN-STATOR USING 3D FEMM A Thesis Submitted to the Graduate Faculty of the Louisiana State University and Agricultural and Mechanical College in partial fulfillment of the requirements for the degree of Master of Science in Electrical Engineering in The Department of Electrical & Computer Engineering by Oleksandr Dobzhanskyi Bachelor of Industrial Engineering, Kiev National University of Construction and Architecture, 2006; Master of Industrial Engineering, Kiev National University of Construction and Architecture, 2007 December, 2010 ACKNOWLEGEMENTS I would like to thank my advisor prof. E. Mendrela for guiding me through my work so that my thesis would be a contribution to Electrical Engineering as a science. His encouragement and ability to motivate inspired me for becoming a professional in Power area. I am very grateful to prof. -

Performance and Applications of L1B2 Ultrasonic Motors
actuators Review Performance and Applications of L1B2 Ultrasonic Motors Gal Peled, Roman Yasinov * and Nir Karasikov Nanomotion Ltd., 3 Hayetsira St., Yokneam 20692, Israel; [email protected] (G.P.); [email protected] (N.K.) * Correspondence: [email protected]; Tel.: +972-073-249-8023 Academic Editor: Kenji Uchino Received: 13 April 2016; Accepted: 25 May 2016; Published: 1 June 2016 Abstract: Piezoelectric ultrasonic motors offer important advantages for motion applications where high speed is coupled with high precision. The advances made in the recent decades in the field of ultrasonic motor based motion solutions allow the construction of complete motion platforms in the fields of semiconductors, aerospace and electro-optics. Among the various motor designs, the L1B2 motor type has been successful in industrial applications, offering high precision, effective control and operational robustness. This paper reviews the design of high precision motion solutions based on L1B2 ultrasonic motors—from the basic motor structure to the complete motion solution architecture, including motor drive and control, material considerations and performance envelope. The performance is demonstrated, via constructed motion stages, to exhibit fast move and settle, a repeatability window of tens of nanometers, lifetime into the tens of millions of operational cycles, and compatibility with clean room and aerospace environments. Example stages and modules for semiconductor, aerospace, electro-optical and biomedical applications are presented. The described semiconductor and aerospace solutions are powered by Nanomotion HR type motors, driven by a sine wave up to 80 V/mm rms, having a driving frequency of 39.6 kHz, providing a maximum force up to 4 N per driving element (at 5 W power consumption per element) and a maximum linear velocity above 300 mm/s. -
ICMDT2015 Preliminary Program Thursday, April 23
ICMDT2015 Preliminary Program (Titles and Author Names from Abstracts.) As of March 30, 2015 Thursday, April 23 Time Plenary Room Room A Room B Room C Room D Room E 9:00- Opening 9:15 9:15- INV-1 FUNCTIONAL COATINGS FOR 10:00 TRIBOLOGICAL APPLICATIONS Dae-Eun Kim Yonsei University, Korea 10:00- KN-1 DEVELOPMENT OF LIFE SUPPORT 10:30 DEVICES USING INCLUSIVE DESIGN Eiichirou Tanaka Saitama University, Japan 10:30- Group Photo/Break 10:45- 12:15 Machine Elements (1) (Joint, Bolt) Coatings and Surface Modification (1) Machine Design (1) Hydraulic/Functional Fluid Actuators Manufacturing Systems 3002 NOVEL JOINT APPLICABLE IN OFF- 3010 SURFACE CHARACTERISTICS OF 3142 XY AND Z SCANNER DEVELOPMENT 3237 MULTI-PHYSICS ANALYSIS OF THE 3080 SHARING 3D DESIGN MODEL IN CENTERED CONDITION PLASMA NITRIDED 12% CHROME FOR HIGH ACCURACY ATOMIC ELECTRO-HYDRAULIC SERVO REAL-TIME CONFERENCE AND Keiji Imado1, Kiyoshi Terada1, Thomas STEELS FORCE MICROSCOPE VALVE FACILITATE DECISION MAKING IN Harran1 Lyta Liem1, Farid Triawan1, Hideaki Byoung-Woon Ahn1, Hyun-Suk Oh1, So-Nam Yun1, In-Seob Park1, Young- COLLABORATIVE DESIGN 1 Oita University, Japan Maeda1 Ah-jin Jo1, Sang-Joon Cho1, Sang-il Bog Ham1, Hyun-Cheol Lee2 PROCESS BY WEB FRAMEWORK 1 Torishima Pump Mfg. Co., Ltd., Japan Park1 1 Korea Institute of Machinery & Jiaqi Lu1, Seongho Kim1, Hyun-Tae 1 Park systems Corp. R&D center, Materials, 2 SG Servo, Korea Hwang1, Soo-Hong Lee1 Korea 1 Yonsei University, Korea 3084 TIGHTENING RELIABILITY USING 3013 IMPROVEMENT IN ADHESIVE 3143 RESEARCH ON DRIVE MECHANISM -
![Arxiv:1802.09420V1 [Physics.App-Ph]](https://docslib.b-cdn.net/cover/8163/arxiv-1802-09420v1-physics-app-ph-4628163.webp)
Arxiv:1802.09420V1 [Physics.App-Ph]
- Multiferroic Micro-Motors With Deterministic Single Input Control John P. Domann∗ Department of Biomedical Engineering and Mechanics, Virginia Polytechnic and State University Cai Chen, Abdon E. Sepulveda, and Greg P. Carman Department of Mechanical and Aerospace Engineering, University of California, Los Angeles Rob N. Candler Department of Electrical and Computer Engineering, University of California, Los Angeles Department of Mechanical and Aerospace Engineering, University of California, Los Angeles and California NanoSystems Institute, Los Angeles (Dated: February 27, 2018) Abstract Abstract: This paper describes a method for achieving continuous deterministic 360◦ magnetic moment rotations in single domain magnetoelastic discs, and examines the performance bounds for a mechanically lossless multiferroic bead-on-a-disc motor based on dipole coupling these discs to small magnetic nanobeads. The continuous magnetic rotations are attained by controlling the relative orientation of a four-fold anisotropy (e.g., cubic magnetocrystalline anisotropy) with respect to the two-fold magnetoelastic anisotropy. This arXiv:1802.09420v1 [physics.app-ph] 26 Feb 2018 approach produces continuous rotations from the quasi-static regime up through operational frequencies of several GHz. Driving strains of only 90 to 180 ppm are required for operation of motors using existing ≈ materials. The large operational frequencies and small sizes, with lateral dimensions of 100s of nanome- ≈ ters, produce large power densities for the rotary bead-on-a-disc -
A Smart Ultrasonic Actuator with Multidegree of Freedom for Unmanned Vehicle Guidance Industrial Applications
A smart 3D ultrasonic actuator for unmanned vehicle guidance industrial applications Item Type Meetings and Proceedings Authors Shafik, Mahmoud; Ashu, Mfortaw, Elvis; Nyathi, B. Citation Shafik, M. et al. (2015) 'A smart 3D ultrasonic actuator for unmanned vehicle guidance industrial applications', Proceedings of the 11th International Conference on Intelligent Unmanned Systems (ICIUS), vol. 11, Bali, Indonesia, 26-29 August DOI 10.21535%2FProICIUS.2015.v11.652 Publisher UNSYS Digital Journal Proceedings of the 11th International Conference on Intelligent Unmanned Systems (ICIUS) Rights Archived with thanks to Dental clinics of North America Download date 23/09/2021 21:31:51 Link to Item http://hdl.handle.net/10545/620897 A Smart Ultrasonic Actuator with Multidegree of Freedom for Unmanned Vehicle Guidance Industrial Applications Mahmoud Shafik & M Elvis Ashu & B Nyathi College of Engineering and Technology, University of Derby, Derby, DE22 3AW, UK Email: [email protected] Abstract A smart piezoelectric ultrasonic actuator with plays a key role in the development of intelligent systems and multidegree of freedom for unmanned vehicle guidance enables decision making for some of the industrial process and industrial applications is presented in this paper. The proposed manufacturing. The primary objectives of this research is to actuator is aiming to increase the visual spotlight angle of develop technology that has the ability to perceive, reason, digital visual data capture transducer. Furthermore research move and learn from experiences, at lower cost. We are are still undertaken to integrate the actuator with an infrared particularly focus on developing of an actuator system that sensor, visual data capture digital transducers and obtain the could provide 3D motions with multidegree of freedom to trajectory of motion control algorithm.