A Review and Scope of Humanoid Robotics
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Humanoid Robots – from Fiction to Reality?
KI-Zeitschrift, 4/08, pp. 5-9, December 2008 Humanoid Robots { From Fiction to Reality? Sven Behnke Humanoid robots have been fascinating people ever since the invention of robots. They are the embodiment of artificial intelligence. While in science fiction, human-like robots act autonomously in complex human-populated environments, in reality, the capabilities of humanoid robots are quite limited. This article reviews the history of humanoid robots, discusses the state-of-the-art and speculates about future developments in the field. 1 Introduction 1495 Leonardo da Vinci designed and possibly built a mechan- ical device that looked like an armored knight. It was designed Humanoid robots, robots with an anthropomorphic body plan to sit up, wave its arms, and move its head via a flexible neck and human-like senses, are enjoying increasing popularity as re- while opening and closing its jaw. By the eighteenth century, search tool. More and more groups worldwide work on issues like elaborate mechanical dolls were able to write short phrases, play bipedal locomotion, dexterous manipulation, audio-visual per- musical instruments, and perform other simple, life-like acts. ception, human-robot interaction, adaptive control, and learn- In 1921 the word robot was coined by Karel Capek in its ing, targeted for the application in humanoid robots. theatre play: R.U.R. (Rossum's Universal Robots). The me- These efforts are motivated by the vision to create a new chanical servant in the play had a humanoid appearance. The kind of tool: robots that work in close cooperation with hu- first humanoid robot to appear in the movies was Maria in the mans in the same environment that we designed to suit our film Metropolis (Fritz Lang, 1926). -

A Humanoid Robot
NAIN 1.0 – A HUMANOID ROBOT by Shivam Shukla (1406831124) Shubham Kumar (1406831131) Shashank Bhardwaj (1406831117) Department of Electronics & Communication Engineering Meerut Institute of Engineering & Technology Meerut, U.P. (India)-250005 May, 2018 NAIN 1.0 – HUMANOID ROBOT by Shivam Shukla (1406831124) Shubham Kumar (1406831131) Shashank Bhardwaj (1406831117) Submitted to the Department of Electronics & Communication Engineering in partial fulfillment of the requirements for the degree of Bachelor of Technology in Electronics & Communication Meerut Institute of Engineering & Technology, Meerut Dr. A.P.J. Abdul Kalam Technical University, Lucknow May, 2018 DECLARATION I hereby declare that this submission is my own work and that, to the best of my knowledge and belief, it contains no material previously published or written by another person nor material which to a substantial extent has been accepted for the award of any other degree or diploma of the university or other institute of higher learning except where due acknowledgment has been made in the text. Signature Signature Name: Mr. Shivam Shukla Name: Mr. Shashank Bhardwaj Roll No. 1406831124 Roll No. 1406831117 Date: Date: Signature Name: Mr. Shubham Kumar Roll No. 1406831131 Date: ii CERTIFICATE This is to certify that Project Report entitled “Humanoid Robot” which is submitted by Shivam Shukla (1406831124), Shashank Bhardwaj (1406831117), Shubahm Kumar (1406831131) in partial fulfillment of the requirement for the award of degree B.Tech in Department of Electronics & Communication Engineering of Gautam Buddh Technical University (Formerly U.P. Technical University), is record of the candidate own work carried out by him under my/our supervision. The matter embodied in this thesis is original and has not been submitted for the award of any other degree. -
The Tip of a Hospitality Revolution (5:48 Mins) Listening Comprehension with Pre-Listening and Post-Listening Exercises Pre-List
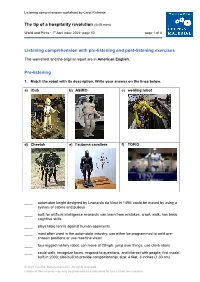
Listening comprehension worksheet by Carol Richards The tip of a hospitality revolution (5:48 mins) World and Press • 1st April issue 2021• page 10 page 1 of 8 Listening comprehension with pre-listening and post-listening exercises This worksheet and the original report are in American English. Pre-listening 1. Match the robot with its description. Write your answer on the lines below. a) iCub b) ASIMO c) welding robot d) Cheetah e) l’automa cavaliere f) TOPIO ____ automaton knight designed by Leonardo da Vinci in 1495; could be moved by using a system of cables and pulleys ____ built for artificial intelligence research; can learn from mistakes, crawl, walk; has basic cognitive skills ____ plays table tennis against human opponents ____ most often used in the automobile industry; can either be programmed to weld pre- chosen positions or use machine vision ____ four-legged military robot, can move at 28mph, jump over things, use climb stairs ____ could walk, recognize faces, respond to questions, and interact with people; first model built in 2000; also built to provide companionship; size: 4 feet, 3 inches (1.30 cm) © 2021 Carl Ed. Schünemann KG. All rights reserved. Copies of this material may only be produced by subscribers for use in their own lessons. The tip of a hospitality revolution World and Press • April 1 / 2021 • page 10 page 2 of 8 2. Vocabulary practice Match the terms on the left with their German meanings on the right. Write your answers in the grid below. a) billion A Abfindung b) competitive advantage B auf etw. -
City of Atlanta 2016-2020 Capital Improvements Program (CIP) Community Work Program (CWP)
City of Atlanta 2016-2020 Capital Improvements Program (CIP) Community Work Program (CWP) Prepared By: Department of Planning and Community Development 55 Trinity Avenue Atlanta, Georgia 30303 www.atlantaga.gov DRAFT JUNE 2015 Page is left blank intentionally for document formatting City of Atlanta 2016‐2020 Capital Improvements Program (CIP) and Community Work Program (CWP) June 2015 City of Atlanta Department of Planning and Community Development Office of Planning 55 Trinity Avenue Suite 3350 Atlanta, GA 30303 http://www.atlantaga.gov/indeex.aspx?page=391 Online City Projects Database: http:gis.atlantaga.gov/apps/cityprojects/ Mayor The Honorable M. Kasim Reed City Council Ceasar C. Mitchell, Council President Carla Smith Kwanza Hall Ivory Lee Young, Jr. Council District 1 Council District 2 Council District 3 Cleta Winslow Natalyn Mosby Archibong Alex Wan Council District 4 Council District 5 Council District 6 Howard Shook Yolanda Adreaan Felicia A. Moore Council District 7 Council District 8 Council District 9 C.T. Martin Keisha Bottoms Joyce Sheperd Council District 10 Council District 11 Council District 12 Michael Julian Bond Mary Norwood Andre Dickens Post 1 At Large Post 2 At Large Post 3 At Large Department of Planning and Community Development Terri M. Lee, Deputy Commissioner Charletta Wilson Jacks, Director, Office of Planning Project Staff Jessica Lavandier, Assistant Director, Strategic Planning Rodney Milton, Principal Planner Lenise Lyons, Urban Planner Capital Improvements Program Sub‐Cabinet Members Atlanta BeltLine, -

Design of a Drone with a Robotic End-Effector
Design of a Drone with a Robotic End-Effector Suhas Varadaramanujan, Sawan Sreenivasa, Praveen Pasupathy, Sukeerth Calastawad, Melissa Morris, Sabri Tosunoglu Department of Mechanical and Materials Engineering Florida International University Miami, Florida 33174 [email protected], [email protected] , [email protected], [email protected], [email protected], [email protected] ABSTRACT example, the widely-used predator drone for military purposes is the MQ-1 by General Atomics which is remote controlled, UAVs The concept presented involves a combination of a quadcopter typically fall into one of six functional categories (i.e. target and drone and an end-effector arm, which is designed with the decoy, reconnaissance, combat, logistics, R&D, civil and capability of lifting and picking fruits from an elevated position. commercial). The inspiration for this concept was obtained from the swarm robots which have an effector arm to pick small cubes, cans to even With the advent of aerial robotics technology, UAVs became more collecting experimental samples as in case of space exploration. sophisticated and led to development of quadcopters which gained The system as per preliminary analysis would contain two popularity as mini-helicopters. A quadcopter, also known as a physically separate components, but linked with a common quadrotor helicopter, is lifted by means of four rotors. In operation, algorithm which includes controlling of the drone’s positions along the quadcopters generally use two pairs of identical fixed pitched with the movement of the arm. propellers; two clockwise (CW) and two counterclockwise (CCW). They use independent variation of the speed of each rotor to achieve Keywords control. -

Design and Control of a Personal Assistant Robot Yang Qian
Design and Control of a Personal Assistant Robot Yang Qian To cite this version: Yang Qian. Design and Control of a Personal Assistant Robot. Other. Ecole Centrale de Lille, 2013. English. NNT : 2013ECLI0005. tel-00864692 HAL Id: tel-00864692 https://tel.archives-ouvertes.fr/tel-00864692 Submitted on 23 Sep 2013 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. N° d’ordre : 219 ECOLE CENTRALE DE LILLE THESE Présentée en vue d’obtenir le grade de DOCTEUR En Automatique, Génie Informatique, Traitement du Signal et Image Par QIAN Yang DOCTORAT DELIVRE PAR L’ECOLE CENTRALE DE LILLE Titre de la thèse : Conception et Commande d’un Robot d’Assistance à la Personne Design and Control of a Personal Assistant Robot Soutenue le 04 Juillet 2013 devant le jury d’examen : Président Saïd MAMMAR Professeur, Université d'Evry Val d'Essonne, Evry Rapporteur Nacer K.M’SIRDI Professeur, Polytech Marseille, Marseille Rapporteur Daniel SIDOBRE Maître de Conférences, HDR, Université Paul Sabatier, Toulouse Rapporteur Jianming YANG Professeur, Meijo University, Japon Membre Belkacem Ould Boumama Professeur, Polytech Lille, Lille Membre Qiang ZHAN Professeur, Beihang University, Chine Directeur de thèse Ahmed RAHMANI Maître de Conférences, HDR, Ecole Centrale de Lille, Lille Thèse préparée dans le Laboratoire d’Automatique, Génie Informatique et Signal L.A.G.I.S. -

Kultur -Und Techniksoziologische Studien
KKUULLTTUURR-- UUNNDD TTEECCHHNNIIKKSSOOZZIIOOLLOOGGIISSCCHHEE SSTTUUDDIIEENN no 03/2013 no 03/2013 - 2 - Working Papers kultur- und techniksoziologische Studien http://www.uni-due.de/wpkts no 03/2013 Herausgeber: Diego Compagna, Stefan Derpmann Layout: Vera Keysers Kontaktadresse: Universität Duisburg-Essen Institut für Soziologie Diego Compagna [email protected] Ein Verzeichnis aller Beiträge befindet sich hier: http://www.uni-due.de/wpkts ISSN 1866-3877 (Working Papers kultur- und techniksoziologische Studien) Working Papers kultur- und techniksoziologische Studien - Copyright This online working paper may be cited or briefly quoted in line with the usual academic conventions. You may also download them for your own personal use. This paper must not be published elsewhere (e.g. to mailing lists, bulletin boards etc.) without the author‘s explicit permission. Please note that if you copy this paper you must: • include this copyright note • not use the paper for commercial purposes or gain in any way You should observe the conventions of academic citation in a version of the following form: Author (Year): Title. In: Working Papers kultur- und techniksoziologische Studien (no xx/Year). Eds.: Diego Compagna / Stefan Derpmann, University Duisburg-Essen, Germany, at: http://www.uni-due.de/wpkts Working Papers kultur- und techniksoziologische Studien - Copyright Das vorliegende Working Paper kann entsprechend der üblichen akademischen Regeln zitiert werden. Es kann für den persönlichen Gebrauch auch lokal gespeichert werden. Es darf nicht anderweitig publiziert oder verteilt werden (z.B. in Mailinglisten) ohne die ausdrückliche Erlaubnis des/der Autors/in. Sollte dieses Paper ausgedruckt oder kopiert werden: • Müssen diese Copyright Informationen enthalten sein • Darf es nicht für kommerzielle Zwecke verwendet werden Es sollten die allgemein üblichen Zitationsregeln befolgt werden, bspw. -

Preserving the Balance a U.S
PRESERVING THE BALANCE A U.S. EURASIA DEFENSE STRATEGY ANDREW F. KREPINEVICH PRESERVING THE BALANCE A U.S. EURASIA DEFENSE STRATEGY ANDREW F. KREPINEVICH 2017 ABOUT THE CENTER FOR STRATEGIC AND BUDGETARY ASSESSMENTS (CSBA) The Center for Strategic and Budgetary Assessments is an independent, nonpartisan policy research institute established to promote innovative thinking and debate about national security strategy and investment options. CSBA’s analysis focuses on key questions related to existing and emerging threats to U.S. national security, and its goal is to enable policymakers to make informed decisions on matters of strategy, security policy, and resource allocation. ©2017 Center for Strategic and Budgetary Assessments. All rights reserved. ABOUT THE AUTHOR Andrew F. Krepinevich is a distinguished senior fellow at the Center for Strategic and Budgetary Assessments (CSBA). Prior to this he served as CSBA’s president. He assumed this posi- tion when he founded CSBA in 1993, serving until March of 2016. This was preceded by a 21-year career in the U.S. Army. Dr. Krepinevich has also served as a member of the National Defense Panel, the Defense Science Board Task Force on Joint Experimentation, the Joint Forces Command Advisory Board, the Army Special Operations Command Advisory Panel and the Defense Policy Board. He currently serves as chairman of the Chief of Naval Operations’ Executive Panel, and on the Advisory Council of Business Executives for National Security. Dr. Krepinevich has lectured before a wide range of professional and academic audiences, and has served as a consultant on military affairs for many senior government officials, including several secretaries of defense, the CIA’s National Intelligence Council, and all four military services. -
Planetary Exploration Using Bio Inspired Technologies
© 2016 California Institute of Technology. Government sponsorship acknowledged. Planetary exploration using bio inspired technologies Ref.: Y. Bar-Cohen & D. Hanson “Humanlike Robots” 2009. Courtesy of Adi Marom, Graphics Artist. Yoseph Bar-Cohen, Jet Propulsion Laboratory, California Institute of Technology http://ndeaa.jpl.nasa.gov/ Who really invented the wheel? Ref: http://www.natgeocreative.com/photography/1246755 2 Biology – inspiring human innovation Honeycomb structures are part of almost every aircraft The fins were copied to significantly improve Flying was enabled using aerodynamic swimming and diving principles http://www.wildland.com/trips/details/326/ne The spider is quite an w_zealand_itin.aspx “engineer”. Its web may have inspired the fishing net, fibers, clothing and others. http://www.swimoutlet.com/Swim_Fins _s/329.htm The octopus as a model for biomimetics Adaptive shape, texture and camouflage of the Octopus Courtesy of William M. Kier, of North Carolina Courtesy of Roger T. Hanlon, Director, Marine Resources Center, Marine Biological Lab., MA Camouflage has many forms The swan puffs its wings to look Jewel Scarab Beetles - Leafy seadragon bigger in an attack posture bright colors appear bigger Butterfly - Color matching Owl butterfly Wikipedia freely licensed media Lizard - Color matching http://en.wikipedia.org/wiki/Owl_butterfly 5 Plants use of camouflage • To maximize the pollination opportunities - flowers are as visible as possible. • To protect from premature damage – initially, fruits are green, have sour taste, and are camouflaged by leaves. • Once ripped, fruits become colorful and tasty, as well as have good smell Biomimetic robotic exploration of the universe The mountain goat is an inspiring model for all- terrain legged rovers The Curiosity rover and the Mars Science Laboratory MSL) landed on Mars in Aug. -

Surveillance Robot Controlled Using an Android App Project Report Submitted in Partial Fulfillment of the Requirements for the Degree Of
Surveillance Robot controlled using an Android app Project Report Submitted in partial fulfillment of the requirements for the degree of Bachelor of Engineering by Shaikh Shoeb Maroof Nasima (Roll No.12CO92) Ansari Asgar Ali Shamshul Haque Shakina (Roll No.12CO106) Khan Sufiyan Liyaqat Ali Kalimunnisa (Roll No.12CO81) Mir Ibrahim Salim Farzana (Roll No.12CO82) Supervisor Prof. Kalpana R. Bodke Co-Supervisor Prof. Amer Syed Department of Computer Engineering, School of Engineering and Technology Anjuman-I-Islam’s Kalsekar Technical Campus Plot No. 2 3, Sector -16, Near Thana Naka, Khanda Gaon, New Panvel, Navi Mumbai. 410206 Academic Year : 2014-2015 CERTIFICATE Department of Computer Engineering, School of Engineering and Technology, Anjuman-I-Islam’s Kalsekar Technical Campus Khanda Gaon,New Panvel, Navi Mumbai. 410206 This is to certify that the project entitled “Surveillance Robot controlled using an Android app” is a bonafide work of Shaikh Shoeb Maroof Nasima (12CO92), Ansari Asgar Ali Shamshul Haque Shakina (12CO106), Khan Sufiyan Liyaqat Ali Kalimunnisa (12CO81), Mir Ibrahim Salim Farzana (12CO82) submitted to the University of Mumbai in partial ful- fillment of the requirement for the award of the degree of “Bachelor of Engineering” in De- partment of Computer Engineering. Prof. Kalpana R. Bodke Prof. Amer Syed Supervisor/Guide Co-Supervisor/Guide Prof. Tabrez Khan Dr. Abdul Razak Honnutagi Head of Department Director Project Approval for Bachelor of Engineering This project I entitled Surveillance robot controlled using an android application by Shaikh Shoeb Maroof Nasima, Ansari Asgar Ali Shamshul Haque Shakina, Mir Ibrahim Salim Farzana,Khan Sufiyan Liyaqat Ali Kalimunnisa is approved for the degree of Bachelor of Engineering in Department of Computer Engineering. -

Modeling and Control of Legged Robots Pierre-Brice Wieber, Russ Tedrake, Scott Kuindersma
Modeling and Control of Legged Robots Pierre-Brice Wieber, Russ Tedrake, Scott Kuindersma To cite this version: Pierre-Brice Wieber, Russ Tedrake, Scott Kuindersma. Modeling and Control of Legged Robots. Springer Handbook of Robotics, Springer International Publishing, pp.1203-1234, 2016, 10.1007/978- 3-319-32552-1_48. hal-02487855 HAL Id: hal-02487855 https://hal.inria.fr/hal-02487855 Submitted on 21 Feb 2020 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. Chapter 48 Modeling and Control of Legged Robots Summary Introduction The promise of legged robots over standard wheeled robots is to provide im- proved mobility over rough terrain. This promise builds on the decoupling between the environment and the main body of the robot that the presence of articulated legs allows, with two consequences. First, the motion of the main body of the robot can be made largely independent from the roughness of the terrain, within the kinematic limits of the legs: legs provide an active suspen- sion system. Indeed, one of the most advanced hexapod robots of the 1980s was aptly called the Adaptive Suspension Vehicle [1]. Second, this decoupling al- lows legs to temporarily leave their contact with the ground: isolated footholds on a discontinuous terrain can be overcome, allowing to visit places absolutely out of reach otherwise. -

Washington Apple Pi Journal, July-August 2008
July/August 2008 Volume 30, No. 4 Washington Apple Pi Cl) ..c +.l M -c m o r a A Journal for Macintosh Computer Users Day Sund:1y ER DISCUSSION lil!i;iiiiif;tifij;pfl~Q~o°4./i_~r{,J;'/i;;J~ Ll / - ·· . -±2-0449 luz bevern. ge or s· Topic A specinc week and day of the \~' eek I 2nd ~ J l Wednesday-- -------- Washington Apple Pi Meetings July 2008 General Meeting July 2 6, 9:30 a.m., Luther Jackson Middle School Little Apps I Love! This month's meeting is going to be chock-full of discoveries with several presenters sharing some of their favorite little apps (applications) or widgets with you. Also featured: genealogy on the Mac. Come, watch and learn! There are tens of thousands of really cool third-party programs available. Learn how to find them yourself, d iscover new ways to do neat things, enhance your computing productivity, or express your creativity in new ways.There is no doubt the Mac can help you be productive but it can be fun too! After exploring little apps, Dick Nugent, a long time Pi member, will guide us through doing family genealogy on the Mac. He will continue in the Genealogy SIG with a demonstration of the popular Mac genealogy software, Reunion. As we have for thirty years, we will start with our legendary Q & A session, followed by Pi business. Kitty's Coffee Break will reenergize everyone for the main presentations. We will close with a short Town Hall meeting where your questions or comments for the leadership will be taken.Then comes lunch! The afternoon is reserved for three Special Interest Group meetings.The Beginners SIG, the ilife SIG and the rejuvenated Genealogy SIG provide opportunity for more focused attention, so bring your questions and your projects to share with the others.