Physics 311 Analytical Mechanics Fall, 2020
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Glossary Physics (I-Introduction)
1 Glossary Physics (I-introduction) - Efficiency: The percent of the work put into a machine that is converted into useful work output; = work done / energy used [-]. = eta In machines: The work output of any machine cannot exceed the work input (<=100%); in an ideal machine, where no energy is transformed into heat: work(input) = work(output), =100%. Energy: The property of a system that enables it to do work. Conservation o. E.: Energy cannot be created or destroyed; it may be transformed from one form into another, but the total amount of energy never changes. Equilibrium: The state of an object when not acted upon by a net force or net torque; an object in equilibrium may be at rest or moving at uniform velocity - not accelerating. Mechanical E.: The state of an object or system of objects for which any impressed forces cancels to zero and no acceleration occurs. Dynamic E.: Object is moving without experiencing acceleration. Static E.: Object is at rest.F Force: The influence that can cause an object to be accelerated or retarded; is always in the direction of the net force, hence a vector quantity; the four elementary forces are: Electromagnetic F.: Is an attraction or repulsion G, gravit. const.6.672E-11[Nm2/kg2] between electric charges: d, distance [m] 2 2 2 2 F = 1/(40) (q1q2/d ) [(CC/m )(Nm /C )] = [N] m,M, mass [kg] Gravitational F.: Is a mutual attraction between all masses: q, charge [As] [C] 2 2 2 2 F = GmM/d [Nm /kg kg 1/m ] = [N] 0, dielectric constant Strong F.: (nuclear force) Acts within the nuclei of atoms: 8.854E-12 [C2/Nm2] [F/m] 2 2 2 2 2 F = 1/(40) (e /d ) [(CC/m )(Nm /C )] = [N] , 3.14 [-] Weak F.: Manifests itself in special reactions among elementary e, 1.60210 E-19 [As] [C] particles, such as the reaction that occur in radioactive decay. -

A Brief History and Philosophy of Mechanics
A Brief History and Philosophy of Mechanics S. A. Gadsden McMaster University, [email protected] 1. Introduction During this period, several clever inventions were created. Some of these were Archimedes screw, Hero of Mechanics is a branch of physics that deals with the Alexandria’s aeolipile (steam engine), the catapult and interaction of forces on a physical body and its trebuchet, the crossbow, pulley systems, odometer, environment. Many scholars consider the field to be a clockwork, and a rolling-element bearing (used in precursor to modern physics. The laws of mechanics Roman ships). [5] Although mechanical inventions apply to many different microscopic and macroscopic were being made at an accelerated rate, it wasn’t until objects—ranging from the motion of electrons to the after the Middle Ages when classical mechanics orbital patterns of galaxies. [1] developed. Attempting to understand the underlying principles of 3. Classical Period (1500 – 1900 AD) the universe is certainly a daunting task. It is therefore no surprise that the development of ‘idea and thought’ Classical mechanics had many contributors, although took many centuries, and bordered many different the most notable ones were Galileo, Huygens, Kepler, fields—atomism, metaphysics, religion, mathematics, Descartes and Newton. “They showed that objects and mechanics. The history of mechanics can be move according to certain rules, and these rules were divided into three main periods: antiquity, classical, and stated in the forms of laws of motion.” [1] quantum. The most famous of these laws were Newton’s Laws of 2. Period of Antiquity (800 BC – 500 AD) Motion, which accurately describe the relationships between force, velocity, and acceleration on a body. -

Classical Mechanics
Classical Mechanics Hyoungsoon Choi Spring, 2014 Contents 1 Introduction4 1.1 Kinematics and Kinetics . .5 1.2 Kinematics: Watching Wallace and Gromit ............6 1.3 Inertia and Inertial Frame . .8 2 Newton's Laws of Motion 10 2.1 The First Law: The Law of Inertia . 10 2.2 The Second Law: The Equation of Motion . 11 2.3 The Third Law: The Law of Action and Reaction . 12 3 Laws of Conservation 14 3.1 Conservation of Momentum . 14 3.2 Conservation of Angular Momentum . 15 3.3 Conservation of Energy . 17 3.3.1 Kinetic energy . 17 3.3.2 Potential energy . 18 3.3.3 Mechanical energy conservation . 19 4 Solving Equation of Motions 20 4.1 Force-Free Motion . 21 4.2 Constant Force Motion . 22 4.2.1 Constant force motion in one dimension . 22 4.2.2 Constant force motion in two dimensions . 23 4.3 Varying Force Motion . 25 4.3.1 Drag force . 25 4.3.2 Harmonic oscillator . 29 5 Lagrangian Mechanics 30 5.1 Configuration Space . 30 5.2 Lagrangian Equations of Motion . 32 5.3 Generalized Coordinates . 34 5.4 Lagrangian Mechanics . 36 5.5 D'Alembert's Principle . 37 5.6 Conjugate Variables . 39 1 CONTENTS 2 6 Hamiltonian Mechanics 40 6.1 Legendre Transformation: From Lagrangian to Hamiltonian . 40 6.2 Hamilton's Equations . 41 6.3 Configuration Space and Phase Space . 43 6.4 Hamiltonian and Energy . 45 7 Central Force Motion 47 7.1 Conservation Laws in Central Force Field . 47 7.2 The Path Equation . -

Engineering Physics I Syllabus COURSE IDENTIFICATION Course
Engineering Physics I Syllabus COURSE IDENTIFICATION Course Prefix/Number PHYS 104 Course Title Engineering Physics I Division Applied Science Division Program Physics Credit Hours 4 credit hours Revision Date Fall 2010 Assessment Goal per Outcome(s) 70% INSTRUCTION CLASSIFICATION Academic COURSE DESCRIPTION This course is the first semester of a calculus-based physics course primarily intended for engineering and science majors. Course work includes studying forces and motion, and the properties of matter and heat. Topics will include motion in one, two, and three dimensions, mechanical equilibrium, momentum, energy, rotational motion and dynamics, periodic motion, and conservation laws. The laboratory (taken concurrently) presents exercises that are designed to reinforce the concepts presented and discussed during the lectures. PREREQUISITES AND/OR CO-RECQUISITES MATH 150 Analytic Geometry and Calculus I The engineering student should also be proficient in algebra and trigonometry. Concurrent with Phys. 140 Engineering Physics I Laboratory COURSE TEXT *The official list of textbooks and materials for this course are found on Inside NC. • COLLEGE PHYSICS, 2nd Ed. By Giambattista, Richardson, and Richardson, McGraw-Hill, 2007. • Additionally, the student must have a scientific calculator with trigonometric functions. COURSE OUTCOMES • To understand and be able to apply the principles of classical Newtonian mechanics. • To effectively communicate classical mechanics concepts and solutions to problems, both in written English and through mathematics. • To be able to apply critical thinking and problem solving skills in the application of classical mechanics. To demonstrate successfully accomplishing the course outcomes, the student should be able to: 1) Demonstrate knowledge of physical concepts by their application in problem solving. -

Effective Field Theories, Reductionism and Scientific Explanation Stephan
To appear in: Studies in History and Philosophy of Modern Physics Effective Field Theories, Reductionism and Scientific Explanation Stephan Hartmann∗ Abstract Effective field theories have been a very popular tool in quantum physics for almost two decades. And there are good reasons for this. I will argue that effec- tive field theories share many of the advantages of both fundamental theories and phenomenological models, while avoiding their respective shortcomings. They are, for example, flexible enough to cover a wide range of phenomena, and concrete enough to provide a detailed story of the specific mechanisms at work at a given energy scale. So will all of physics eventually converge on effective field theories? This paper argues that good scientific research can be characterised by a fruitful interaction between fundamental theories, phenomenological models and effective field theories. All of them have their appropriate functions in the research process, and all of them are indispens- able. They complement each other and hang together in a coherent way which I shall characterise in some detail. To illustrate all this I will present a case study from nuclear and particle physics. The resulting view about scientific theorising is inherently pluralistic, and has implications for the debates about reductionism and scientific explanation. Keywords: Effective Field Theory; Quantum Field Theory; Renormalisation; Reductionism; Explanation; Pluralism. ∗Center for Philosophy of Science, University of Pittsburgh, 817 Cathedral of Learning, Pitts- burgh, PA 15260, USA (e-mail: [email protected]) (correspondence address); and Sektion Physik, Universit¨at M¨unchen, Theresienstr. 37, 80333 M¨unchen, Germany. 1 1 Introduction There is little doubt that effective field theories are nowadays a very popular tool in quantum physics. -

An Introduction to Supersymmetry
An Introduction to Supersymmetry Ulrich Theis Institute for Theoretical Physics, Friedrich-Schiller-University Jena, Max-Wien-Platz 1, D–07743 Jena, Germany [email protected] This is a write-up of a series of five introductory lectures on global supersymmetry in four dimensions given at the 13th “Saalburg” Summer School 2007 in Wolfersdorf, Germany. Contents 1 Why supersymmetry? 1 2 Weyl spinors in D=4 4 3 The supersymmetry algebra 6 4 Supersymmetry multiplets 6 5 Superspace and superfields 9 6 Superspace integration 11 7 Chiral superfields 13 8 Supersymmetric gauge theories 17 9 Supersymmetry breaking 22 10 Perturbative non-renormalization theorems 26 A Sigma matrices 29 1 Why supersymmetry? When the Large Hadron Collider at CERN takes up operations soon, its main objective, besides confirming the existence of the Higgs boson, will be to discover new physics beyond the standard model of the strong and electroweak interactions. It is widely believed that what will be found is a (at energies accessible to the LHC softly broken) supersymmetric extension of the standard model. What makes supersymmetry such an attractive feature that the majority of the theoretical physics community is convinced of its existence? 1 First of all, under plausible assumptions on the properties of relativistic quantum field theories, supersymmetry is the unique extension of the algebra of Poincar´eand internal symmtries of the S-matrix. If new physics is based on such an extension, it must be supersymmetric. Furthermore, the quantum properties of supersymmetric theories are much better under control than in non-supersymmetric ones, thanks to powerful non- renormalization theorems. -
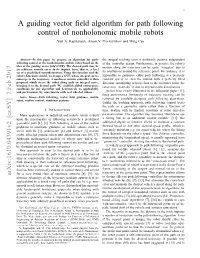
A Guiding Vector Field Algorithm for Path Following Control Of
1 A guiding vector field algorithm for path following control of nonholonomic mobile robots Yuri A. Kapitanyuk, Anton V. Proskurnikov and Ming Cao Abstract—In this paper we propose an algorithm for path- the integral tracking error is uniformly positive independent following control of the nonholonomic mobile robot based on the of the controller design. Furthermore, in practice the robot’s idea of the guiding vector field (GVF). The desired path may be motion along the trajectory can be quite “irregular” due to an arbitrary smooth curve in its implicit form, that is, a level set of a predefined smooth function. Using this function and the its oscillations around the reference point. For instance, it is robot’s kinematic model, we design a GVF, whose integral curves impossible to guarantee either path following at a precisely converge to the trajectory. A nonlinear motion controller is then constant speed, or even the motion with a perfectly fixed proposed which steers the robot along such an integral curve, direction. Attempting to keep close to the reference point, the bringing it to the desired path. We establish global convergence robot may “overtake” it due to unpredictable disturbances. conditions for our algorithm and demonstrate its applicability and performance by experiments with real wheeled robots. As has been clearly illustrated in the influential paper [11], these performance limitations of trajectory tracking can be Index Terms—Path following, vector field guidance, mobile removed by carefully designed path following algorithms. robot, motion control, nonlinear systems Unlike the tracking approach, path following control treats the path as a geometric curve rather than a function of I. -

Towards a Glossary of Activities in the Ontology Engineering Field
View metadata, citation and similar papers at core.ac.uk brought to you by CORE provided by Servicio de Coordinación de Bibliotecas de la Universidad Politécnica de Madrid Towards a Glossary of Activities in the Ontology Engineering Field Mari Carmen Suárez-Figueroa, Asunción Gómez-Pérez Ontology Engineering Group, Universidad Politécnica de Madrid Campus de Montegancedo, Avda. Montepríncipe s/n, Boadilla del Monte, Madrid, Spain E-mail: [email protected], [email protected] Abstract The Semantic Web of the future will be characterized by using a very large number of ontologies embedded in ontology networks. It is important to provide strong methodological support for collaborative and context-sensitive development of networks of ontologies. This methodological support includes the identification and definition of which activities should be carried out when ontology networks are collaboratively built. In this paper we present the consensus reaching process followed within the NeOn consortium for the identification and definition of the activities involved in the ontology network development process. The consensus reaching process here presented produces as a result the NeOn Glossary of Activities. This work was conceived due to the lack of standardization in the Ontology Engineering terminology, which clearly contrasts with the Software Engineering field. Our future aim is to standardize the NeOn Glossary of Activities. field of knowledge. In the case of IEEE Standard Glossary 1. Introduction of Software Engineering Terminology (IEEE, 1990), this The Semantic Web of the future will be characterized by glossary identifies terms in use in the field of Software using a very large number of ontologies embedded in Engineering and establishes standard definitions for those ontology networks built by distributed teams (NeOn terms. -
Ch 11 Vibrations and Waves Simple Harmonic Motion Simple Harmonic Motion
Ch 11 Vibrations and Waves Simple Harmonic Motion Simple Harmonic Motion A vibration (oscillation) back & forth taking the same amount of time for each cycle is periodic. Each vibration has an equilibrium position from which it is somehow disturbed by a given energy source. The disturbance produces a displacement from equilibrium. This is followed by a restoring force. Vibrations transfer energy. Recall Hooke’s Law The restoring force of a spring is proportional to the displacement, x. F = -kx. K is the proportionality constant and we choose the equilibrium position of x = 0. The minus sign reminds us the restoring force is always opposite the displacement, x. F is not constant but varies with position. Acceleration of the mass is not constant therefore. http://www.youtube.com/watch?v=eeYRkW8V7Vg&feature=pl ayer_embedded Key Terms Displacement- distance from equilibrium Amplitude- maximum displacement Cycle- one complete to and fro motion Period (T)- Time for one complete cycle (s) Frequency (f)- number of cycles per second (Hz) * period and frequency are inversely related: T = 1/f f = 1/T Energy in SHOs (Simple Harmonic Oscillators) In stretching or compressing a spring, work is required and potential energy is stored. Elastic PE is given by: PE = ½ kx2 Total mechanical energy E of the mass-spring system = sum of KE + PE E = ½ mv2 + ½ kx2 Here v is velocity of the mass at x position from equilibrium. E remains constant w/o friction. Energy Transformations As a mass oscillates on a spring, the energy changes from PE to KE while the total E remains constant. -

The Development of the Action Principle a Didactic History from Euler-Lagrange to Schwinger Series: Springerbriefs in Physics
springer.com Walter Dittrich The Development of the Action Principle A Didactic History from Euler-Lagrange to Schwinger Series: SpringerBriefs in Physics Provides a philosophical interpretation of the development of physics Contains many worked examples Shows the path of the action principle - from Euler's first contributions to present topics This book describes the historical development of the principle of stationary action from the 17th to the 20th centuries. Reference is made to the most important contributors to this topic, in particular Bernoullis, Leibniz, Euler, Lagrange and Laplace. The leading theme is how the action principle is applied to problems in classical physics such as hydrodynamics, electrodynamics and gravity, extending also to the modern formulation of quantum mechanics 1st ed. 2021, XV, 135 p. 23 illus., 1 illus. and quantum field theory, especially quantum electrodynamics. A critical analysis of operator in color. versus c-number field theory is given. The book contains many worked examples. In particular, the term "vacuum" is scrutinized. The book is aimed primarily at actively working researchers, Printed book graduate students and historians interested in the philosophical interpretation and evolution of Softcover physics; in particular, in understanding the action principle and its application to a wide range 54,99 € | £49.99 | $69.99 of natural phenomena. [1]58,84 € (D) | 60,49 € (A) | CHF 65,00 eBook 46,00 € | £39.99 | $54.99 [2]46,00 € (D) | 46,00 € (A) | CHF 52,00 Available from your library or springer.com/shop MyCopy [3] Printed eBook for just € | $ 24.99 springer.com/mycopy Order online at springer.com / or for the Americas call (toll free) 1-800-SPRINGER / or email us at: [email protected]. -

Euler Equation and Geodesics R
Euler Equation and Geodesics R. Herman February 2, 2018 Introduction Newton formulated the laws of motion in his 1687 volumes, col- lectively called the Philosophiae Naturalis Principia Mathematica, or simply the Principia. However, Newton’s development was geometrical and is not how we see classical dynamics presented when we first learn mechanics. The laws of mechanics are what are now considered analytical mechanics, in which classical dynamics is presented in a more elegant way. It is based upon variational principles, whose foundations began with the work of Eu- ler and Lagrange and have been refined by other now-famous figures in the eighteenth and nineteenth centuries. Euler coined the term the calculus of variations in 1756, though it is also called variational calculus. The goal is to find minima or maxima of func- tions of the form f : M ! R, where M can be a set of numbers, functions, paths, curves, surfaces, etc. Interest in extrema problems in classical mechan- ics began near the end of the seventeenth century with Newton and Leibniz. In the Principia, Newton was interested in the least resistance of a surface of revolution as it moves through a fluid. Seeking extrema at the time was not new, as the Egyptians knew that the shortest path between two points is a straight line and that a circle encloses the largest area for a given perimeter. Heron, an Alexandrian scholar, deter- mined that light travels along the shortest path. This problem was later taken up by Willibrord Snellius (1580–1626) after whom Snell’s law of refraction is named. -

Chapter 1 Chapter 2 Chapter 3
Notes CHAPTER 1 1. Herbert Westren Turnbull, The Great Mathematicians in The World of Mathematics. James R. Newrnan, ed. New York: Sirnon & Schuster, 1956. 2. Will Durant, The Story of Philosophy. New York: Sirnon & Schuster, 1961, p. 41. 3. lbid., p. 44. 4. G. E. L. Owen, "Aristotle," Dictionary of Scientific Biography. New York: Char1es Scribner's Sons, Vol. 1, 1970, p. 250. 5. Durant, op. cit., p. 44. 6. Owen, op. cit., p. 251. 7. Durant, op. cit., p. 53. CHAPTER 2 1. Williarn H. Stahl, '' Aristarchus of Samos,'' Dictionary of Scientific Biography. New York: Charles Scribner's Sons, Vol. 1, 1970, p. 246. 2. Jbid., p. 247. 3. G. J. Toorner, "Ptolerny," Dictionary of Scientific Biography. New York: Charles Scribner's Sons, Vol. 11, 1975, p. 187. CHAPTER 3 1. Stephen F. Mason, A History of the Sciences. New York: Abelard-Schurnan Ltd., 1962, p. 127. 2. Edward Rosen, "Nicolaus Copernicus," Dictionary of Scientific Biography. New York: Charles Scribner's Sons, Vol. 3, 1971, pp. 401-402. 3. Mason, op. cit., p. 128. 4. Rosen, op. cit., p. 403. 391 392 NOTES 5. David Pingree, "Tycho Brahe," Dictionary of Scientific Biography. New York: Charles Scribner's Sons, Vol. 2, 1970, p. 401. 6. lbid.. p. 402. 7. Jbid., pp. 402-403. 8. lbid., p. 413. 9. Owen Gingerich, "Johannes Kepler," Dictionary of Scientific Biography. New York: Charles Scribner's Sons, Vol. 7, 1970, p. 289. 10. lbid.• p. 290. 11. Mason, op. cit., p. 135. 12. Jbid .. p. 136. 13. Gingerich, op. cit., p. 305. CHAPTER 4 1.