Classical Mechanics
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Glossary Physics (I-Introduction)
1 Glossary Physics (I-introduction) - Efficiency: The percent of the work put into a machine that is converted into useful work output; = work done / energy used [-]. = eta In machines: The work output of any machine cannot exceed the work input (<=100%); in an ideal machine, where no energy is transformed into heat: work(input) = work(output), =100%. Energy: The property of a system that enables it to do work. Conservation o. E.: Energy cannot be created or destroyed; it may be transformed from one form into another, but the total amount of energy never changes. Equilibrium: The state of an object when not acted upon by a net force or net torque; an object in equilibrium may be at rest or moving at uniform velocity - not accelerating. Mechanical E.: The state of an object or system of objects for which any impressed forces cancels to zero and no acceleration occurs. Dynamic E.: Object is moving without experiencing acceleration. Static E.: Object is at rest.F Force: The influence that can cause an object to be accelerated or retarded; is always in the direction of the net force, hence a vector quantity; the four elementary forces are: Electromagnetic F.: Is an attraction or repulsion G, gravit. const.6.672E-11[Nm2/kg2] between electric charges: d, distance [m] 2 2 2 2 F = 1/(40) (q1q2/d ) [(CC/m )(Nm /C )] = [N] m,M, mass [kg] Gravitational F.: Is a mutual attraction between all masses: q, charge [As] [C] 2 2 2 2 F = GmM/d [Nm /kg kg 1/m ] = [N] 0, dielectric constant Strong F.: (nuclear force) Acts within the nuclei of atoms: 8.854E-12 [C2/Nm2] [F/m] 2 2 2 2 2 F = 1/(40) (e /d ) [(CC/m )(Nm /C )] = [N] , 3.14 [-] Weak F.: Manifests itself in special reactions among elementary e, 1.60210 E-19 [As] [C] particles, such as the reaction that occur in radioactive decay. -

Vector Mechanics: Statics
PDHOnline Course G492 (4 PDH) Vector Mechanics: Statics Mark A. Strain, P.E. 2014 PDH Online | PDH Center 5272 Meadow Estates Drive Fairfax, VA 22030-6658 Phone & Fax: 703-988-0088 www.PDHonline.org www.PDHcenter.com An Approved Continuing Education Provider www.PDHcenter.com PDHonline Course G492 www.PDHonline.org Table of Contents Introduction ..................................................................................................................................... 1 Vectors ............................................................................................................................................ 1 Vector Decomposition ................................................................................................................ 2 Components of a Vector ............................................................................................................. 2 Force ............................................................................................................................................... 4 Equilibrium ..................................................................................................................................... 5 Equilibrium of a Particle ............................................................................................................. 6 Rigid Bodies.............................................................................................................................. 10 Pulleys ...................................................................................................................................... -

On the History of the Radiation Reaction1 Kirk T
On the History of the Radiation Reaction1 Kirk T. McDonald Joseph Henry Laboratories, Princeton University, Princeton, NJ 08544 (May 6, 2017; updated March 18, 2020) 1 Introduction Apparently, Kepler considered the pointing of comets’ tails away from the Sun as evidence for radiation pressure of light [2].2 Following Newton’s third law (see p. 83 of [3]), one might suppose there to be a reaction of the comet back on the incident light. However, this theme lay largely dormant until Poincar´e (1891) [37, 41] and Planck (1896) [46] discussed the effect of “radiation damping” on an oscillating electric charge that emits electromagnetic radiation. Already in 1892, Lorentz [38] had considered the self force on an extended, accelerated charge e, finding that for low velocity v this force has the approximate form (in Gaussian units, where c is the speed of light in vacuum), independent of the radius of the charge, 3e2 d2v 2e2v¨ F = = . (v c). (1) self 3c3 dt2 3c3 Lorentz made no connection at the time between this force and radiation, which connection rather was first made by Planck [46], who considered that there should be a damping force on an accelerated charge in reaction to its radiation, and by a clever transformation arrived at a “radiation-damping” force identical to eq. (1). Today, Lorentz is often credited with identifying eq. (1) as the “radiation-reaction force”, and the contribution of Planck is seldom acknowledged. This note attempts to review the history of thoughts on the “radiation reaction”, which seems to be in conflict with the brief discussions in many papers and “textbooks”.3 2 What is “Radiation”? The “radiation reaction” would seem to be a reaction to “radiation”, but the concept of “radiation” is remarkably poorly defined in the literature. -

Knowledge Assessment in Statics: Concepts Versus Skills
Session 1168 Knowledge Assessment in Statics: Concepts versus skills Scott Danielson Arizona State University Abstract Following the lead of the physics community, engineering faculty have recognized the value of good assessment instruments for evaluating the learning of their students. These assessment instruments can be used to both measure student learning and to evaluate changes in teaching, i.e., did student-learning increase due different ways of teaching. As a result, there are significant efforts underway to develop engineering subject assessment tools. For instance, the Foundation Coalition is supporting assessment tool development efforts in a number of engineering subjects. These efforts have focused on developing “concept” inventories. These concept inventories focus on determining student understanding of the subject’s fundamental concepts. Separately, a NSF-supported effort to develop an assessment tool for statics was begun in the last year by the authors. As a first step, the project team analyzed prior work aimed at delineating important knowledge areas in statics. They quickly recognized that these important knowledge areas contained both conceptual and “skill” components. Both knowledge areas are described and examples of each are provided. Also, a cognitive psychology-based taxonomy of declarative and procedural knowledge is discussed in relation to determining the difference between a concept and a skill. Subsequently, the team decided to focus on development of a concept-based statics assessment tool. The ongoing Delphi process to refine the inventory of important statics concepts and validate the concepts with a broader group of subject matter experts is described. However, the value and need for a skills-based assessment tool is also recognized. -

Measurement of the Speed of Gravity
Measurement of the Speed of Gravity Yin Zhu Agriculture Department of Hubei Province, Wuhan, China Abstract From the Liénard-Wiechert potential in both the gravitational field and the electromagnetic field, it is shown that the speed of propagation of the gravitational field (waves) can be tested by comparing the measured speed of gravitational force with the measured speed of Coulomb force. PACS: 04.20.Cv; 04.30.Nk; 04.80.Cc Fomalont and Kopeikin [1] in 2002 claimed that to 20% accuracy they confirmed that the speed of gravity is equal to the speed of light in vacuum. Their work was immediately contradicted by Will [2] and other several physicists. [3-7] Fomalont and Kopeikin [1] accepted that their measurement is not sufficiently accurate to detect terms of order , which can experimentally distinguish Kopeikin interpretation from Will interpretation. Fomalont et al [8] reported their measurements in 2009 and claimed that these measurements are more accurate than the 2002 VLBA experiment [1], but did not point out whether the terms of order have been detected. Within the post-Newtonian framework, several metric theories have studied the radiation and propagation of gravitational waves. [9] For example, in the Rosen bi-metric theory, [10] the difference between the speed of gravity and the speed of light could be tested by comparing the arrival times of a gravitational wave and an electromagnetic wave from the same event: a supernova. Hulse and Taylor [11] showed the indirect evidence for gravitational radiation. However, the gravitational waves themselves have not yet been detected directly. [12] In electrodynamics the speed of electromagnetic waves appears in Maxwell equations as c = √휇0휀0, no such constant appears in any theory of gravity. -

A Brief History and Philosophy of Mechanics
A Brief History and Philosophy of Mechanics S. A. Gadsden McMaster University, [email protected] 1. Introduction During this period, several clever inventions were created. Some of these were Archimedes screw, Hero of Mechanics is a branch of physics that deals with the Alexandria’s aeolipile (steam engine), the catapult and interaction of forces on a physical body and its trebuchet, the crossbow, pulley systems, odometer, environment. Many scholars consider the field to be a clockwork, and a rolling-element bearing (used in precursor to modern physics. The laws of mechanics Roman ships). [5] Although mechanical inventions apply to many different microscopic and macroscopic were being made at an accelerated rate, it wasn’t until objects—ranging from the motion of electrons to the after the Middle Ages when classical mechanics orbital patterns of galaxies. [1] developed. Attempting to understand the underlying principles of 3. Classical Period (1500 – 1900 AD) the universe is certainly a daunting task. It is therefore no surprise that the development of ‘idea and thought’ Classical mechanics had many contributors, although took many centuries, and bordered many different the most notable ones were Galileo, Huygens, Kepler, fields—atomism, metaphysics, religion, mathematics, Descartes and Newton. “They showed that objects and mechanics. The history of mechanics can be move according to certain rules, and these rules were divided into three main periods: antiquity, classical, and stated in the forms of laws of motion.” [1] quantum. The most famous of these laws were Newton’s Laws of 2. Period of Antiquity (800 BC – 500 AD) Motion, which accurately describe the relationships between force, velocity, and acceleration on a body. -

Foundations of Newtonian Dynamics: an Axiomatic Approach For
Foundations of Newtonian Dynamics: 1 An Axiomatic Approach for the Thinking Student C. J. Papachristou 2 Department of Physical Sciences, Hellenic Naval Academy, Piraeus 18539, Greece Abstract. Despite its apparent simplicity, Newtonian mechanics contains conceptual subtleties that may cause some confusion to the deep-thinking student. These subtle- ties concern fundamental issues such as, e.g., the number of independent laws needed to formulate the theory, or, the distinction between genuine physical laws and deriva- tive theorems. This article attempts to clarify these issues for the benefit of the stu- dent by revisiting the foundations of Newtonian dynamics and by proposing a rigor- ous axiomatic approach to the subject. This theoretical scheme is built upon two fun- damental postulates, namely, conservation of momentum and superposition property for interactions. Newton’s laws, as well as all familiar theorems of mechanics, are shown to follow from these basic principles. 1. Introduction Teaching introductory mechanics can be a major challenge, especially in a class of students that are not willing to take anything for granted! The problem is that, even some of the most prestigious textbooks on the subject may leave the student with some degree of confusion, which manifests itself in questions like the following: • Is the law of inertia (Newton’s first law) a law of motion (of free bodies) or is it a statement of existence (of inertial reference frames)? • Are the first two of Newton’s laws independent of each other? It appears that -
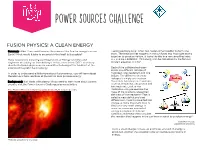
Power Sources Challenge
POWER SOURCES CHALLENGE FUSION PHYSICS! A CLEAN ENERGY Summary: What if we could harness the power of the Sun for energy here on Fusion reactions occur when two nuclei come together to form one Earth? What would it take to accomplish this feat? Is it possible? atom. The reaction that happens in the sun fuses two Hydrogen atoms together to produce Helium. It looks like this in a very simplified way: Many researchers including our Department of Energy scientists and H + H He + ENERGY. This energy can be calculated by the famous engineers are taking on this challenge! In fact, there is one DOE Laboratory Einstein equation, E = mc2. devoted to fusion physics and is committed to being at the forefront of the science of magnetic fusion energy. Each of the colliding hydrogen atoms is a different isotope of In order to understand a little more about fusion energy, you will learn about hydrogen, one deuterium and one the atom and how reactions at the atomic level produce energy. tritium. The difference in these isotopes is simply one neutron. Background: It all starts with plasma! If you need to learn more about plasma Deuterium has one proton and one physics, visit the Power Sources Challenge plasma activities. neutron, tritium has one proton and two neutrons. Look at the The Fusion Reaction that happens in the SUN looks like this: illustration—do you see how the mass of the products is less than the mass of the reactants? That is called a mass deficit and that difference in mass is converted into energy. -

Conservative Forces and Potential Energy
Program 7 / Chapter 7 Conservative forces and potential energy In the motion of a mass acted on by a conservative force the total energy in the system, which is the sum of the kinetic and potential energies, is conserved. In this section, this motion is computed numerically using the Euler–Cromer method. Theory In section 7–2 of your textbook the oscillatory motion of a mass attached to a spring is described in the context of energy conservation. Specifically, if the spring is initially compressed then the system has spring potential energy. When the mass is free to move, this potential energy is converted into kinetic energy, K = 1/2mv2. The spring then stretches past its equilibrium position, the potential energy increases again until it equals its initial value. This oscillatory motion is illustrated in Fig. 7–7 of your textbook. Consider the more complicated situation in which the force on the particle is given by F(x) = x - 4qx 3 This is a conservative force and the its potential energy is 1 2 4 U(x) = - 2 x + qx (see Fig. 7–10). From the force, we can calculate the motion using Newton’s second law. The program that you will use in this section calculates this motion and demonstrates that the total energy, E = K + U, is conserved (i.e., E remains constant). Given the force, F, on an object (of mass m), its position and velocity may be found by solving the two ordinary differential equations, dv 1 dx = F ; = v dt m dt If we replace the derivatives with their right derivative approximations, we have v(t + Dt) - v(t) 1 x(t + Dt) - x(t) = F(t) ; = v(t) Dt m Dt or v - v 1 x - x f i = F ; f i = v Dt m i Dt i where the subscripts i and f refer to the initial (time t) and final (time t+Dt) values. -

Engineering Physics I Syllabus COURSE IDENTIFICATION Course
Engineering Physics I Syllabus COURSE IDENTIFICATION Course Prefix/Number PHYS 104 Course Title Engineering Physics I Division Applied Science Division Program Physics Credit Hours 4 credit hours Revision Date Fall 2010 Assessment Goal per Outcome(s) 70% INSTRUCTION CLASSIFICATION Academic COURSE DESCRIPTION This course is the first semester of a calculus-based physics course primarily intended for engineering and science majors. Course work includes studying forces and motion, and the properties of matter and heat. Topics will include motion in one, two, and three dimensions, mechanical equilibrium, momentum, energy, rotational motion and dynamics, periodic motion, and conservation laws. The laboratory (taken concurrently) presents exercises that are designed to reinforce the concepts presented and discussed during the lectures. PREREQUISITES AND/OR CO-RECQUISITES MATH 150 Analytic Geometry and Calculus I The engineering student should also be proficient in algebra and trigonometry. Concurrent with Phys. 140 Engineering Physics I Laboratory COURSE TEXT *The official list of textbooks and materials for this course are found on Inside NC. • COLLEGE PHYSICS, 2nd Ed. By Giambattista, Richardson, and Richardson, McGraw-Hill, 2007. • Additionally, the student must have a scientific calculator with trigonometric functions. COURSE OUTCOMES • To understand and be able to apply the principles of classical Newtonian mechanics. • To effectively communicate classical mechanics concepts and solutions to problems, both in written English and through mathematics. • To be able to apply critical thinking and problem solving skills in the application of classical mechanics. To demonstrate successfully accomplishing the course outcomes, the student should be able to: 1) Demonstrate knowledge of physical concepts by their application in problem solving. -

THE EARTH's GRAVITY OUTLINE the Earth's Gravitational Field
GEOPHYSICS (08/430/0012) THE EARTH'S GRAVITY OUTLINE The Earth's gravitational field 2 Newton's law of gravitation: Fgrav = GMm=r ; Gravitational field = gravitational acceleration g; gravitational potential, equipotential surfaces. g for a non–rotating spherically symmetric Earth; Effects of rotation and ellipticity – variation with latitude, the reference ellipsoid and International Gravity Formula; Effects of elevation and topography, intervening rock, density inhomogeneities, tides. The geoid: equipotential mean–sea–level surface on which g = IGF value. Gravity surveys Measurement: gravity units, gravimeters, survey procedures; the geoid; satellite altimetry. Gravity corrections – latitude, elevation, Bouguer, terrain, drift; Interpretation of gravity anomalies: regional–residual separation; regional variations and deep (crust, mantle) structure; local variations and shallow density anomalies; Examples of Bouguer gravity anomalies. Isostasy Mechanism: level of compensation; Pratt and Airy models; mountain roots; Isostasy and free–air gravity, examples of isostatic balance and isostatic anomalies. Background reading: Fowler §5.1–5.6; Lowrie §2.2–2.6; Kearey & Vine §2.11. GEOPHYSICS (08/430/0012) THE EARTH'S GRAVITY FIELD Newton's law of gravitation is: ¯ GMm F = r2 11 2 2 1 3 2 where the Gravitational Constant G = 6:673 10− Nm kg− (kg− m s− ). ¢ The field strength of the Earth's gravitational field is defined as the gravitational force acting on unit mass. From Newton's third¯ law of mechanics, F = ma, it follows that gravitational force per unit mass = gravitational acceleration g. g is approximately 9:8m/s2 at the surface of the Earth. A related concept is gravitational potential: the gravitational potential V at a point P is the work done against gravity in ¯ P bringing unit mass from infinity to P. -

Pioneers in Optics: Christiaan Huygens
Downloaded from Microscopy Pioneers https://www.cambridge.org/core Pioneers in Optics: Christiaan Huygens Eric Clark From the website Molecular Expressions created by the late Michael Davidson and now maintained by Eric Clark, National Magnetic Field Laboratory, Florida State University, Tallahassee, FL 32306 . IP address: [email protected] 170.106.33.22 Christiaan Huygens reliability and accuracy. The first watch using this principle (1629–1695) was finished in 1675, whereupon it was promptly presented , on Christiaan Huygens was a to his sponsor, King Louis XIV. 29 Sep 2021 at 16:11:10 brilliant Dutch mathematician, In 1681, Huygens returned to Holland where he began physicist, and astronomer who lived to construct optical lenses with extremely large focal lengths, during the seventeenth century, a which were eventually presented to the Royal Society of period sometimes referred to as the London, where they remain today. Continuing along this line Scientific Revolution. Huygens, a of work, Huygens perfected his skills in lens grinding and highly gifted theoretical and experi- subsequently invented the achromatic eyepiece that bears his , subject to the Cambridge Core terms of use, available at mental scientist, is best known name and is still in widespread use today. for his work on the theories of Huygens left Holland in 1689, and ventured to London centrifugal force, the wave theory of where he became acquainted with Sir Isaac Newton and began light, and the pendulum clock. to study Newton’s theories on classical physics. Although it At an early age, Huygens began seems Huygens was duly impressed with Newton’s work, he work in advanced mathematics was still very skeptical about any theory that did not explain by attempting to disprove several theories established by gravitation by mechanical means.