Oscillations
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Forced Mechanical Oscillations
169 Carl von Ossietzky Universität Oldenburg – Faculty V - Institute of Physics Module Introductory laboratory course physics – Part I Forced mechanical oscillations Keywords: HOOKE's law, harmonic oscillation, harmonic oscillator, eigenfrequency, damped harmonic oscillator, resonance, amplitude resonance, energy resonance, resonance curves References: /1/ DEMTRÖDER, W.: „Experimentalphysik 1 – Mechanik und Wärme“, Springer-Verlag, Berlin among others. /2/ TIPLER, P.A.: „Physik“, Spektrum Akademischer Verlag, Heidelberg among others. /3/ ALONSO, M., FINN, E. J.: „Fundamental University Physics, Vol. 1: Mechanics“, Addison-Wesley Publishing Company, Reading (Mass.) among others. 1 Introduction It is the object of this experiment to study the properties of a „harmonic oscillator“ in a simple mechanical model. Such harmonic oscillators will be encountered in different fields of physics again and again, for example in electrodynamics (see experiment on electromagnetic resonant circuit) and atomic physics. Therefore it is very important to understand this experiment, especially the importance of the amplitude resonance and phase curves. 2 Theory 2.1 Undamped harmonic oscillator Let us observe a set-up according to Fig. 1, where a sphere of mass mK is vertically suspended (x-direc- tion) on a spring. Let us neglect the effects of friction for the moment. When the sphere is at rest, there is an equilibrium between the force of gravity, which points downwards, and the dragging resilience which points upwards; the centre of the sphere is then in the position x = 0. A deflection of the sphere from its equilibrium position by x causes a proportional dragging force FR opposite to x: (1) FxR ∝− The proportionality constant (elastic or spring constant or directional quantity) is denoted D, and Eq. -

Position, Displacement, Velocity Big Picture
Position, Displacement, Velocity Big Picture I Want to know how/why things move I Need a way to describe motion mathematically: \Kinematics" I Tools of kinematics: calculus (rates) and vectors (directions) I Chapters 2, 4 are all about kinematics I First 1D, then 2D/3D I Main ideas: position, velocity, acceleration Language is crucial Physics uses ordinary words but assigns specific technical meanings! WORD ORDINARY USE PHYSICS USE position where something is where something is velocity speed speed and direction speed speed magnitude of velocity vec- tor displacement being moved difference in position \as the crow flies” from one instant to another Language, continued WORD ORDINARY USE PHYSICS USE total distance displacement or path length traveled path length trav- eled average velocity | displacement divided by time interval average speed total distance di- total distance divided by vided by time inter- time interval val How about some examples? Finer points I \instantaneous" velocity v(t) changes from instant to instant I graphically, it's a point on a v(t) curve or the slope of an x(t) curve I average velocity ~vavg is not a function of time I it's defined for an interval between instants (t1 ! t2, ti ! tf , t0 ! t, etc.) I graphically, it's the \rise over run" between two points on an x(t) curve I in 1D, vx can be called v I it's a component that is positive or negative I vectors don't have signs but their components do What you need to be able to do I Given starting/ending position, time, speed for one or more trip legs, calculate average -

Oscillator Circuit Evaluation Method (2) Steps for Evaluating Oscillator Circuits (Oscillation Allowance and Drive Level)
Technical Notes Oscillator Circuit Evaluation Method (2) Steps for evaluating oscillator circuits (oscillation allowance and drive level) Preface In general, a crystal unit needs to be matched with an oscillator circuit in order to obtain a stable oscillation. A poor match between crystal unit and oscillator circuit can produce a number of problems, including, insufficient device frequency stability, devices stop oscillating, and oscillation instability. When using a crystal unit in combination with a microcontroller, you have to evaluate the oscillator circuit. In order to check the match between the crystal unit and the oscillator circuit, you must, at least, evaluate (1) oscillation frequency (frequency matching), (2) oscillation allowance (negative resistance), and (3) drive level. The previous Technical Notes explained frequency matching. These Technical Notes describe the evaluation methods for oscillation allowance (negative resistance) and drive level. 1. Oscillation allowance (negative resistance) evaluations One process used as a means to easily evaluate the negative resistance characteristics and oscillation allowance of an oscillator circuits is the method of adding a resistor to the hot terminal of the crystal unit and observing whether it can oscillate (examining the negative resistance RN). The oscillator circuit capacity can be examined by changing the value of the added resistance (size of loss). The circuit diagram for measuring the negative resistance is shown in Fig. 1. The absolute value of the negative resistance is the value determined by summing up the added resistance r and the equivalent resistance (Re) when the crystal unit is under load. Formula (1) Rf Rd r | RN | Connect _ r+R e .. -
Ch 11 Vibrations and Waves Simple Harmonic Motion Simple Harmonic Motion
Ch 11 Vibrations and Waves Simple Harmonic Motion Simple Harmonic Motion A vibration (oscillation) back & forth taking the same amount of time for each cycle is periodic. Each vibration has an equilibrium position from which it is somehow disturbed by a given energy source. The disturbance produces a displacement from equilibrium. This is followed by a restoring force. Vibrations transfer energy. Recall Hooke’s Law The restoring force of a spring is proportional to the displacement, x. F = -kx. K is the proportionality constant and we choose the equilibrium position of x = 0. The minus sign reminds us the restoring force is always opposite the displacement, x. F is not constant but varies with position. Acceleration of the mass is not constant therefore. http://www.youtube.com/watch?v=eeYRkW8V7Vg&feature=pl ayer_embedded Key Terms Displacement- distance from equilibrium Amplitude- maximum displacement Cycle- one complete to and fro motion Period (T)- Time for one complete cycle (s) Frequency (f)- number of cycles per second (Hz) * period and frequency are inversely related: T = 1/f f = 1/T Energy in SHOs (Simple Harmonic Oscillators) In stretching or compressing a spring, work is required and potential energy is stored. Elastic PE is given by: PE = ½ kx2 Total mechanical energy E of the mass-spring system = sum of KE + PE E = ½ mv2 + ½ kx2 Here v is velocity of the mass at x position from equilibrium. E remains constant w/o friction. Energy Transformations As a mass oscillates on a spring, the energy changes from PE to KE while the total E remains constant. -

Hydraulics Manual Glossary G - 3
Glossary G - 1 GLOSSARY OF HIGHWAY-RELATED DRAINAGE TERMS (Reprinted from the 1999 edition of the American Association of State Highway and Transportation Officials Model Drainage Manual) G.1 Introduction This Glossary is divided into three parts: · Introduction, · Glossary, and · References. It is not intended that all the terms in this Glossary be rigorously accurate or complete. Realistically, this is impossible. Depending on the circumstance, a particular term may have several meanings; this can never change. The primary purpose of this Glossary is to define the terms found in the Highway Drainage Guidelines and Model Drainage Manual in a manner that makes them easier to interpret and understand. A lesser purpose is to provide a compendium of terms that will be useful for both the novice as well as the more experienced hydraulics engineer. This Glossary may also help those who are unfamiliar with highway drainage design to become more understanding and appreciative of this complex science as well as facilitate communication between the highway hydraulics engineer and others. Where readily available, the source of a definition has been referenced. For clarity or format purposes, cited definitions may have some additional verbiage contained in double brackets [ ]. Conversely, three “dots” (...) are used to indicate where some parts of a cited definition were eliminated. Also, as might be expected, different sources were found to use different hyphenation and terminology practices for the same words. Insignificant changes in this regard were made to some cited references and elsewhere to gain uniformity for the terms contained in this Glossary: as an example, “groundwater” vice “ground-water” or “ground water,” and “cross section area” vice “cross-sectional area.” Cited definitions were taken primarily from two sources: W.B. -

Euler Equation and Geodesics R
Euler Equation and Geodesics R. Herman February 2, 2018 Introduction Newton formulated the laws of motion in his 1687 volumes, col- lectively called the Philosophiae Naturalis Principia Mathematica, or simply the Principia. However, Newton’s development was geometrical and is not how we see classical dynamics presented when we first learn mechanics. The laws of mechanics are what are now considered analytical mechanics, in which classical dynamics is presented in a more elegant way. It is based upon variational principles, whose foundations began with the work of Eu- ler and Lagrange and have been refined by other now-famous figures in the eighteenth and nineteenth centuries. Euler coined the term the calculus of variations in 1756, though it is also called variational calculus. The goal is to find minima or maxima of func- tions of the form f : M ! R, where M can be a set of numbers, functions, paths, curves, surfaces, etc. Interest in extrema problems in classical mechan- ics began near the end of the seventeenth century with Newton and Leibniz. In the Principia, Newton was interested in the least resistance of a surface of revolution as it moves through a fluid. Seeking extrema at the time was not new, as the Egyptians knew that the shortest path between two points is a straight line and that a circle encloses the largest area for a given perimeter. Heron, an Alexandrian scholar, deter- mined that light travels along the shortest path. This problem was later taken up by Willibrord Snellius (1580–1626) after whom Snell’s law of refraction is named. -

Chapter 1 Chapter 2 Chapter 3
Notes CHAPTER 1 1. Herbert Westren Turnbull, The Great Mathematicians in The World of Mathematics. James R. Newrnan, ed. New York: Sirnon & Schuster, 1956. 2. Will Durant, The Story of Philosophy. New York: Sirnon & Schuster, 1961, p. 41. 3. lbid., p. 44. 4. G. E. L. Owen, "Aristotle," Dictionary of Scientific Biography. New York: Char1es Scribner's Sons, Vol. 1, 1970, p. 250. 5. Durant, op. cit., p. 44. 6. Owen, op. cit., p. 251. 7. Durant, op. cit., p. 53. CHAPTER 2 1. Williarn H. Stahl, '' Aristarchus of Samos,'' Dictionary of Scientific Biography. New York: Charles Scribner's Sons, Vol. 1, 1970, p. 246. 2. Jbid., p. 247. 3. G. J. Toorner, "Ptolerny," Dictionary of Scientific Biography. New York: Charles Scribner's Sons, Vol. 11, 1975, p. 187. CHAPTER 3 1. Stephen F. Mason, A History of the Sciences. New York: Abelard-Schurnan Ltd., 1962, p. 127. 2. Edward Rosen, "Nicolaus Copernicus," Dictionary of Scientific Biography. New York: Charles Scribner's Sons, Vol. 3, 1971, pp. 401-402. 3. Mason, op. cit., p. 128. 4. Rosen, op. cit., p. 403. 391 392 NOTES 5. David Pingree, "Tycho Brahe," Dictionary of Scientific Biography. New York: Charles Scribner's Sons, Vol. 2, 1970, p. 401. 6. lbid.. p. 402. 7. Jbid., pp. 402-403. 8. lbid., p. 413. 9. Owen Gingerich, "Johannes Kepler," Dictionary of Scientific Biography. New York: Charles Scribner's Sons, Vol. 7, 1970, p. 289. 10. lbid.• p. 290. 11. Mason, op. cit., p. 135. 12. Jbid .. p. 136. 13. Gingerich, op. cit., p. 305. CHAPTER 4 1. -

Exact Solution for the Nonlinear Pendulum (Solu¸C˜Aoexata Do Pˆendulon˜Aolinear)
Revista Brasileira de Ensino de F¶³sica, v. 29, n. 4, p. 645-648, (2007) www.sb¯sica.org.br Notas e Discuss~oes Exact solution for the nonlinear pendulum (Solu»c~aoexata do p^endulon~aolinear) A. Bel¶endez1, C. Pascual, D.I. M¶endez,T. Bel¶endezand C. Neipp Departamento de F¶³sica, Ingenier¶³ade Sistemas y Teor¶³ade la Se~nal,Universidad de Alicante, Alicante, Spain Recebido em 30/7/2007; Aceito em 28/8/2007 This paper deals with the nonlinear oscillation of a simple pendulum and presents not only the exact formula for the period but also the exact expression of the angular displacement as a function of the time, the amplitude of oscillations and the angular frequency for small oscillations. This angular displacement is written in terms of the Jacobi elliptic function sn(u;m) using the following initial conditions: the initial angular displacement is di®erent from zero while the initial angular velocity is zero. The angular displacements are plotted using Mathematica, an available symbolic computer program that allows us to plot easily the function obtained. As we will see, even for amplitudes as high as 0.75¼ (135±) it is possible to use the expression for the angular displacement, but considering the exact expression for the angular frequency ! in terms of the complete elliptic integral of the ¯rst kind. We can conclude that for amplitudes lower than 135o the periodic motion exhibited by a simple pendulum is practically harmonic but its oscillations are not isochronous (the period is a function of the initial amplitude). -
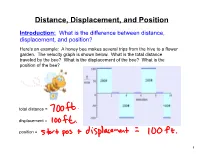
Distance, Displacement, and Position
Distance, Displacement, and Position Introduction: What is the difference between distance, displacement, and position? Here's an example: A honey bee makes several trips from the hive to a flower garden. The velocity graph is shown below. What is the total distance traveled by the bee? What is the displacement of the bee? What is the position of the bee? total distance = displacement = position = 1 Warm-up A particle moves along the x-axis so that the acceleration at any time t is given by: At time , the velocity of the particle is and at time , the position is . (a) Write an expression for the velocity of the particle at any time . (b) For what values of is the particle at rest? (c) Write an expression for the position of the particle at any time . (d) Find the total distance traveled by the particle from to . 2 Warm-up Answers (a) (b) (c) (d) Total Distance = 3 Now, using the equation from the warm-up find the following (WITHOUT A CALCULATOR): (a) the total distance from 0 to 4 (b) the displacement from 0 to 4 4 To find the displacement (position shift) from the velocity function, we just integrate the function. The negative areas below the x-axis subtract from the total displacement. Displacement = To find the distance traveled we have to use absolute value. Distance traveled = To find the distance traveled by hand you must: Find the roots of the velocity equation and integrate in pieces, just like when we found the area between a curve and x-axis. -

Lecture I, Aug25, 2014 Newton, Lagrange and Hamilton's Equations of Classical Mechanics
Lecture I, Aug25, 2014 Newton, Lagrange and Hamilton’s Equations of Classical Mechanics Introduction What this course is about... BOOK Goldstein is a classic Text Book Herbert Goldstein ( June 26, 1922 January 12, 2005) PH D MIT in 1943; Then at Harvard and Columbia first edition of CM book was published in 1950 ( 399 pages, each page is about 3/4 in area compared to new edition) Third edition appeared in 2002 ... But it is an old Text book What we will do different ?? Start with Newton’s Lagrange and Hamilton’s equation one after the other Small Oscillations: Marion, why is it important ??? we start right in the beginning talking about small oscillations, simple limit Phase Space Plots ( Marian, page 159 ) , Touch nonlinear physics and Chaos, Symmetries Order in which Chapters are covered is posted on the course web page Classical Encore 1-4pm, Sept 29, Oct 27, Dec 1 Last week of the Month: Three Body Problem.. ( chaos ), Solitons, may be General Relativity We may not cover scattering and Rigid body dynamics.. the topics that you have covered in Phys303 and I think there is less to gain there.... —————————————————————————— Newton’s Equation, Lagrange and Hamilton’s Equations Beauty Contest: Write Three equations and See which one are the prettiest?? (Simplicity, Mathematical Beauty...) Same Equations disguised in three different forms (I)Lagrange and Hamilton’s equations are scalar equations unlike Newton’s equation.. (II) To apply Newtons’ equation, Forces of constraints are needed to describe constrained motion (III) Symmetries are best described in the Lagrangian formulation (IV)For rectangular coordinates, Newtons’ s Eqn are the easiest. -

The Harmonic Oscillator
Appendix A The Harmonic Oscillator Properties of the harmonic oscillator arise so often throughout this book that it seemed best to treat the mathematics involved in a separate Appendix. A.1 Simple Harmonic Oscillator The harmonic oscillator equation dates to the time of Newton and Hooke. It follows by combining Newton’s Law of motion (F = Ma, where F is the force on a mass M and a is its acceleration) and Hooke’s Law (which states that the restoring force from a compressed or extended spring is proportional to the displacement from equilibrium and in the opposite direction: thus, FSpring =−Kx, where K is the spring constant) (Fig. A.1). Taking x = 0 as the equilibrium position and letting the force from the spring act on the mass: d2x M + Kx = 0. (A.1) dt2 2 = Dividing by the mass and defining ω0 K/M, the equation becomes d2x + ω2x = 0. (A.2) dt2 0 As may be seen by direct substitution, this equation has simple solutions of the form x = x0 sin ω0t or x0 = cos ω0t, (A.3) The original version of this chapter was revised: Pages 329, 330, 335, and 347 were corrected. The correction to this chapter is available at https://doi.org/10.1007/978-3-319-92796-1_8 © Springer Nature Switzerland AG 2018 329 W. R. Bennett, Jr., The Science of Musical Sound, https://doi.org/10.1007/978-3-319-92796-1 330 A The Harmonic Oscillator Fig. A.1 Frictionless harmonic oscillator showing the spring in compressed and extended positions where t is the time and x0 is the maximum amplitude of the oscillation. -
Force-Based Element Vs. Displacement-Based Element
Force-based Element vs. Displacement-based Element Vesna Terzic UC Berkeley December 2011 Agenda • Introduction • Theory of force-based element (FBE) • Theory of displacement-based element (DBE) • Examples • Summary and conclusions • Q & A with web participants Introduction • Contrary to concentrated plasticity models (elastic element with rotational springs at element ends) force-based element (FBE) and displacement- based element (DBE) permit spread of plasticity along the element (distributed plasticity models). • Distributed plasticity models allow yielding to occur at any location along the element, which is especially important in the presence of distributed element loads (girders with high gravity loads). Introduction • OpenSees commands for defining FBE and DBE have the same arguments: element forceBeamColumn $eleTag $iNode $jNode $numIntgrPts $secTag $transfTag element displacementBeamColumn $eleTag $iNode $jNode $numIntgrPts $secTag $transfTag • However a beam-column element needs to be modeled differently using these two elements to achieve a comparable level of accuracy. • The intent of this seminar is to show users how to properly model frame elements with both FBE and DBE. • In order to enhance your understanding of these two elements and to assure their correct application I will present the theory of these two elements and demonstrate their application on two examples. Transformation of global to basic system Element u p u p p aT q v = af u GeometricTran = f q3,v3 q1,v1 v q Basic System q2,v 2 Displacement-based element • The displacement-based approach follows standard finite element procedures where we interpolate section deformations from an approximate displacement field then use the PVD to form the element equilibrium relationship.