Designing a Concurrent File Server
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Performance Best Practices for Vmware Workstation Vmware Workstation 7.0
Performance Best Practices for VMware Workstation VMware Workstation 7.0 This document supports the version of each product listed and supports all subsequent versions until the document is replaced by a new edition. To check for more recent editions of this document, see http://www.vmware.com/support/pubs. EN-000294-00 Performance Best Practices for VMware Workstation You can find the most up-to-date technical documentation on the VMware Web site at: http://www.vmware.com/support/ The VMware Web site also provides the latest product updates. If you have comments about this documentation, submit your feedback to: [email protected] Copyright © 2007–2009 VMware, Inc. All rights reserved. This product is protected by U.S. and international copyright and intellectual property laws. VMware products are covered by one or more patents listed at http://www.vmware.com/go/patents. VMware is a registered trademark or trademark of VMware, Inc. in the United States and/or other jurisdictions. All other marks and names mentioned herein may be trademarks of their respective companies. VMware, Inc. 3401 Hillview Ave. Palo Alto, CA 94304 www.vmware.com 2 VMware, Inc. Contents About This Book 5 Terminology 5 Intended Audience 5 Document Feedback 5 Technical Support and Education Resources 5 Online and Telephone Support 5 Support Offerings 5 VMware Professional Services 6 1 Hardware for VMware Workstation 7 CPUs for VMware Workstation 7 Hyperthreading 7 Hardware-Assisted Virtualization 7 Hardware-Assisted CPU Virtualization (Intel VT-x and AMD AMD-V) -

Chapter 1. Origins of Mac OS X
1 Chapter 1. Origins of Mac OS X "Most ideas come from previous ideas." Alan Curtis Kay The Mac OS X operating system represents a rather successful coming together of paradigms, ideologies, and technologies that have often resisted each other in the past. A good example is the cordial relationship that exists between the command-line and graphical interfaces in Mac OS X. The system is a result of the trials and tribulations of Apple and NeXT, as well as their user and developer communities. Mac OS X exemplifies how a capable system can result from the direct or indirect efforts of corporations, academic and research communities, the Open Source and Free Software movements, and, of course, individuals. Apple has been around since 1976, and many accounts of its history have been told. If the story of Apple as a company is fascinating, so is the technical history of Apple's operating systems. In this chapter,[1] we will trace the history of Mac OS X, discussing several technologies whose confluence eventually led to the modern-day Apple operating system. [1] This book's accompanying web site (www.osxbook.com) provides a more detailed technical history of all of Apple's operating systems. 1 2 2 1 1.1. Apple's Quest for the[2] Operating System [2] Whereas the word "the" is used here to designate prominence and desirability, it is an interesting coincidence that "THE" was the name of a multiprogramming system described by Edsger W. Dijkstra in a 1968 paper. It was March 1988. The Macintosh had been around for four years. -

Zenon Manual Programming Interfaces
zenon manual Programming interfaces v.7.11 ©2014 Ing. Punzenberger COPA-DATA GmbH All rights reserved. Distribution and/or reproduction of this document or parts thereof in any form are permitted solely with the written permission of the company COPA-DATA. The technical data contained herein has been provided solely for informational purposes and is not legally binding. Subject to change, technical or otherwise. Contents 1. Welcome to COPA-DATA help ...................................................................................................... 6 2. Programming interfaces ............................................................................................................... 6 3. Process Control Engine (PCE) ........................................................................................................ 9 3.1 The PCE Editor ............................................................................................................................................. 9 3.1.1 The Taskmanager ....................................................................................................................... 10 3.1.2 The editing area .......................................................................................................................... 10 3.1.3 The output window .................................................................................................................... 11 3.1.4 The menus of the PCE Editor ..................................................................................................... -
Operating System Architectures
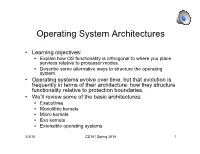
Operating System Architectures • Learning objectives: • Explain how OS functionality is orthogonal to where you place services relative to processor modes. • Describe some alternative ways to structure the operating system. • Operating systems evolve over time, but that evolution is frequently in terms of their architecture: how they structure functionality relative to protection boundaries. • We’ll review some of the basic architectures: • Executives • Monolithic kernels • Micro kernels • Exo kernels • Extensible operating systems 2/3/15 CS161 Spring 2015 1 OS Executives • Think MS-DOS: With no hardware protection, the OS is simply a set of services: • Live in memory • Applications can invoke them • Requires a software trap to invoke them. • Live in same address space as application 1-2-3 QBasic WP Applications Command Software Traps Operating System routlines 2/3/15 CS161 Spring 2015 2 Monolithic Operating System • Traditional architecture • Applications and operating system run in different address spaces. • Operating system runs in privileged mode; applications run in user mode. Applications Operating System file system processes networking Device drivers virtual memory 2/3/15 CS161 Spring 2015 3 Microkernels (late 80’s and on) • Put as little of OS as possible in privileged mode (the microkernel). • Implement most core OS services as user-level servers. • Only microkernel really knows about hardware • File system, device drivers, virtual memory all implemented in unprivileged servers. • Must use IPC (interprocess communication) to communicate among different servers. Applications Process Virtual management memory file system networking Microkernel 2/3/15 CS161 Spring 2015 4 Microkernels: Past and Present • Much research and debate in late 80’s early 90’s • Pioneering effort in Mach (CMU). -

Access Control for the SPIN Extensible Operating System
Access Control for the SPIN Extensible Operating System Robert Grimm Brian N. Bershad Dept. of Computer Science and Engineering University of Washington Seattle, WA 98195, U.S.A. Extensible systems, such as SPIN or Java, raise new se- on extensions and threads, are enforced at link time (when curity concerns. In these systems, code can be added to a an extension wants to link against other extensions) and at running system in almost arbitrary fashion, and it can inter- call time (when a thread wants to call an extension). Ac- act through low latency (but type safe) interfaces with other cess restrictions on objects are enforced by the extension code. Consequently, it is necessary to devise and apply that provides an object’s abstraction (if an extension is not security mechanisms that allow the expression of policies trusted to enforce access control on its objects but is ex- controlling an extension’s access to other extensions and its pected to do so, DTE can be used to prevent other exten- ability to extend, or override, the behavior of already exist- sions from linking against the untrusted extension). ing services. In the SPIN operating system [3, 4] built at the Due to the fine grained composition of extensions in University of Washington, we are experimenting with a ver- SPIN, it is important to minimize the performance overhead sion of domain and type enforcement (DTE) [1, 2] that has of call time access control. We are therefore exploring opti- been extended to address the security concerns of extensible mization that make it possible to avoid some dynamic ac- systems. -

Z/OS Basics Preface
Contents Preface . iii How this course is organized . iii How each topic is organized . iv Part 1. Introduction to z/OS and the mainframe environment Chapter 1. Introduction to the new mainframe . 3 1.1 The new mainframe. 4 1.2 The S/360: A turning point in mainframe history . 4 1.3 An evolving architecture . 5 1.4 Mainframes in our midst . 6 1.5 What is a mainframe? . 7 1.6 Who uses mainframe computers?. 10 1.7 Factors contributing to mainframe use . 11 1.8 Typical mainframe workloads . 14 1.9 Roles in the mainframe world . 21 1.10 z/OS and other mainframe operating systems . 27 1.11 Summary . 29 Chapter 2. z/OS overview. 31 2.1 What is an operating system? . 32 2.2 Overview of z/OS facilities. 32 2.3 What is z/OS? . 34 2.4 Virtual storage and other mainframe concepts . 39 2.5 What is workload management? . 57 2.6 I/O and data management. 60 2.7 Supervising the execution of work in the system . 60 2.8 Defining characteristics of z/OS . 68 2.9 Licensed programs for z/OS . 69 2.10 Middleware for z/OS . 70 2.11 A brief comparison of z/OS and UNIX. 71 2.12 Summary . 73 Chapter 3. TSO/E, ISPF, and UNIX: Interactive facilities of z/OS . 75 3.1 How do we interact with z/OS? . 76 3.2 TSO overview . 76 3.3 ISPF overview . 80 3.4 z/OS UNIX interactive interfaces. 99 3.5 Summary . -

Contents of Lecture 8 on UNIX History
Contents of Lecture 8 on UNIX History Before UNIX Origin of UNIX Commerical wars and other threats Linux Game over. UNIX won. Continued work by the original UNIX team: Plan 9 and Inferno Microkernels vs Monolithic kernels and other issues. Jonas Skeppstedt ([email protected]) Lecture 8 2014 1 / 67 CTSS The Compatible Time-Sharing System was designed at MIT in the early 1960s. Supported up to 32 simultanously logged in users: proof of the time-sharing idea. Ran on IBM 7090 with 32K 36 bit words, of which the monitor used 5K. User programs were swapped in from a magnetic drum (disk). Multilevel feedback scheduling queue. Higher priorities have shorter time quantum Initial priority (quantum) reflects size of the executable file so it can be swapped in and run. CTSS was extremely successful and used as late as 1972: basis for MULTICS. Jonas Skeppstedt ([email protected]) Lecture 8 2014 2 / 67 MULTICS Multiplexed Information and Computing Ser vice designed by MIT, AT&T, and GE. AT&T and GE provided telephone and electricity ser vices as utilities. GE also produced computers, eg the GE-645 used in MULTICS development. Why not do the same with computing power? The goal was one computer for 100,000s users in Boston (on hardware equivalent to about 386 or 486). Designed as an extension to CTSS with virtual memory and sophisticated protection (more levels than UNIX user vs superuser). MULTICS was written in PL/1 and consisted of about 300,000 lines. Jonas Skeppstedt ([email protected]) Lecture 8 2014 3 / 67 End of MULTICS Lots of people were very enthusiastic about MULTICS, including the newly graduated Ken Thompson from Berkeley. -
A Generic Software Modeling Framework for Building Heterogeneous Distributed and Parallel Software Systems
Loyola University Chicago Loyola eCommons Computer Science: Faculty Publications and Other Works Faculty Publications 1994 A Generic Software Modeling Framework for Building Heterogeneous Distributed and Parallel Software Systems William T. O'Connell George K. Thiruvathukal Loyola University Chicago, [email protected] Thomas W. Christopher Follow this and additional works at: https://ecommons.luc.edu/cs_facpubs Part of the Computer Sciences Commons Recommended Citation William T. O'Connell, George K. Thiruvathukal, and Thomas W. Christopher. A generic modeling environment for heterogeneous parallel and distributed computing. In International Conference on Advanced Science and Technology 1994 (ICAST 1994), AT&T Bell Laboratories, 1994. This Conference Proceeding is brought to you for free and open access by the Faculty Publications at Loyola eCommons. It has been accepted for inclusion in Computer Science: Faculty Publications and Other Works by an authorized administrator of Loyola eCommons. For more information, please contact [email protected]. This work is licensed under a Creative Commons Attribution-Noncommercial-No Derivative Works 3.0 License. Copyright © 1994 William T. O'Connell, George K. Thiruvathukal, and Thomas W. Christopher A Generic Software Modelling Framework for Building Heterogeneous Distributed and Parallel Software Systems William T. O’Connell George K. Thiruvathukal Thomas W. Christopher AT&T Bell Laboratories R.R. Donnelley and Sons Company Illinois Institute of Technology Building IX, Rm. 1B-422 Technical Center Department of Computer Science 1200 E. Warrenville Rd. 750 Warrenville Road 10 West Federal Street Naperville, IL 60566 Lisle, IL 60532 Chicago, IL 60616 [email protected] [email protected] [email protected] Abstract Processing Language) are available as alternative interfaces to our distributed computing environment [1]. -

Microkernels in a Bit More Depth
MICROKERNELS IN A BIT MORE DEPTH COMP9242 2006/S2 Week 4 MOTIVATION • Early operating systems had very little structure • A strictly layered approach was promoted by [Dij68] • Later OS (more or less) followed that approach (e.g., Unix). • Such systems are known as monolithic kernels COMP924206S2W04 MICROKERNELS... 2 ADVANTAGES OF MONOLITHIC KERNELS • Kernel has access to everything: ➜ all optimisations possible ➜ all techniques/mechanisms/concepts implementable • Kernel can be extended by adding more code, e.g. for: ➜ new services ➜ support for new hardare COMP924206S2W04 MICROKERNELS... 3 PROBLEMS WITH LAYERED APPROACH • Widening range of services and applications ⇒ OS bigger, more complex, slower, more error prone. • Need to support same OS on different hardware. • Like to support various OS environments. • Distribution ⇒ impossible to provide all services from same (local) kernel. COMP924206S2W04 MICROKERNELS... 4 EVOLUTION OF THE LINUX KERNEL Linux Kernel Size (.tar.gz) 35 30 25 20 15 Size (Mb)Size 10 5 0 31-Jan-93 28-Oct-95 24-Jul-98 19-Apr-01 14-Jan-04 Date Linux 2.4.18: 2.7M LoC COMP924206S2W04 MICROKERNELS... 5 APPROACHES TO TACKLING COMPLEXITY • Classical software-engineering approach: modularity ➜ (relatively) small, mostly self-contained components ➜ well-defined interfaces between them ➜ enforcement of interfaces ➜ containment of faults to few modules COMP924206S2W04 MICROKERNELS... 6 APPROACHES TO TACKLING COMPLEXITY • Classical software-engineering approach: modularity ➜ (relatively) small, mostly self-contained components ➜ well-defined interfaces between them ➜ enforcement of interfaces ➜ containment of faults to few modules • Doesn’t work with monolithic kernels: ➜ all kernel code executes in privileged mode ➜ faults aren’t contained ➜ interfaces cannot be enforced ➜ performance takes priority over structure COMP924206S2W04 MICROKERNELS.. -

Extensibility, Safety and Performance in the SPIN Operating
Overview Extensibility, Safety Background and Motivation and Performance in Modula-3 the SPIN Operating SPIN architecture System Benchmarks Conclusion Presented by Allen Kerr Hardware Vs Software Protection How Network Video works Hardware One-size-fits-all approach to system calls Requires software abstraction Software Applications tell the system what needs to be done Allows checks to be optimized using assumptions Allows untrusted user code to be safely integrated into the kernel How It Ought to Be Motivation Taken from talk “Language Support for Extensible Operating Systems” 1 Modula-3 SPIN Similar feature set to Java Kernel programmed almost exclusively in Pointer safety Exceptions Modula-3 Interfaces Applications can link into kernel Modules Static Type Checking Examples of services Dynamic Linking Filing and buffer cache management Concerns Execution Speed Protocol processing Threads, allocation, and garbage collection Scheduling and thread management Memory Usage Mixed-Language Environment Virtual memory Further SPIN Motivation Goals Most OSs balance generality with specialization Extensibility General systems run many programs but run Allow applications to extend any service few well Performance Specializing general operating system Dynamically inject application code into the kernel Costly Safety Time consuming Rely on language protection for memory safety Error-prone Rely on interface design for component safety SPIN System Components Related Work Hydra Applications manage resources High overhead Microkernels -

In-Kernel Servers on Mach
InKernel ServersonMach Implementation and Performance Jay Lepreau Mike Hibler Bryan Ford Jerey Law Center for Software Science Department of Computer Science University of Utah Salt LakeCity UT Email flepreaumikebafordlawgcsuta hedu Abstract The advantages in mo dularityandpower of microkernelbased op erating systems suchas Macharewell known The existing p erformance problems of these systems however are signicant Much of the p erformance degradation is due to the cost of maintaining separate protection domains traversing software layers and using a semantically richinterpro cess com munication mechanism An approach that optimizes the common case is to p ermit merging of protection domains in p erformance critical applications while maintainin g protection b ound aries for debugging or in situations that demand robustness In our system client calls to the server are eectively b ound either to a simple system call interface or to a full RPC mechanism dep ending on the servers lo cation The optimization reduces argument copies as well as work done in the control path to handle complex and infrequently encountered message typ es In this pap er we present a general metho d of doing this for Mach and the results of applying it to the Mach microkernel and the OSF single server We describ e the necessary mo dications to the kernel the single server and the RPC stub generator Semantic equivalence backwards compatibility and common source and binary co de are preserved Performance on micro and macro b enchmarks is rep orted with RPC p erformance -

Density Functional Studies on EPR Parameters and Spin-Density Distributions
Density Functional Studies on EPR Parameters and Spin-Density Distributions of Transition Metal Complexes DISSERTATION ZUR ERLANGUNG DES NATURWISSENSCHAFTLICHEN DOKTORGRADES DER BAYERISCHEN JULIUS-MAXIMILIANS-UNIVERSITÄT WÜRZBURG VORGELEGT VON CHRISTIAN REMENYI AUS NECKARSULM WÜRZBURG 2006 Eingereicht am: ___________________________________ bei der Fakultät für Chemie und Pharmazie Gutachter: ___________________________________ Gutachter: ___________________________________ der Dissertation Prüfer: ___________________________________ Prüfer: ___________________________________ Prüfer: ___________________________________ des Öffentlichen Promotionskolloquiums Tag des Öffentlichen Promotionskolloquiums: __________ Doktorurkunde ausgehändigt am: ____________________ Contents Introduction 1 Background and Motivation 1 Objectives of the Study 3 Acknowledgements 5 Chapter 1: Density Functional Theory 7 1.1. Density Functional Theory: Relevance and History 7 1.2. The Fundamentals: Elementary Quantum Chemistry and the Hartree-Fock Approximation 7 1.2.1. The Schrödinger Equation 7 1.2.2. The Hartree-Fock Method 8 1.3. Density Functional Theory – The Principles 10 1.3.1. The Hohenberg-Kohn Theorems 10 1.3.2. The Kohn-Sham Approach 11 1.4. Density Functional Theory – The Machinery 12 1.4.1. Functionals 12 1.4.2. The LCAO Approach 14 1.4.3. Basis Sets and Pseudopotentials 15 Chapter 2: Electron Paramagnetic Resonance 17 2.1. The Electron Spin 17 2.1.1. Where does it come from? – The Electron Spin as a Theoretical Concept 17 2.1.2. The Effective Spin Hamiltonian 18 2.1.3. Measuring the Electronic Spin 19 2.2. From an Effective Spin Hamiltonian to a Quantum Mechanical One 20 2.2.1. The Breit-Pauli Hamiltonian 20 2.2.2. Operators Relevant for the Electron-Zeeman and the Hyperfine Interaction 22 2.3. Calculation of g- and A-Tensors: Perturbation Theory 25 2.3.2.