5100-AMC Manual
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

The K-Pop Wave: an Economic Analysis
The K-pop Wave: An Economic Analysis Patrick A. Messerlin1 Wonkyu Shin2 (new revision October 6, 2013) ABSTRACT This paper first shows the key role of the Korean entertainment firms in the K-pop wave: they have found the right niche in which to operate— the ‘dance-intensive’ segment—and worked out a very innovative mix of old and new technologies for developing the Korean comparative advantages in this segment. Secondly, the paper focuses on the most significant features of the Korean market which have contributed to the K-pop success in the world: the relative smallness of this market, its high level of competition, its lower prices than in any other large developed country, and its innovative ways to cope with intellectual property rights issues. Thirdly, the paper discusses the many ways the K-pop wave could ensure its sustainability, in particular by developing and channeling the huge pool of skills and resources of the current K- pop stars to new entertainment and art activities. Last but not least, the paper addresses the key issue of the ‘Koreanness’ of the K-pop wave: does K-pop send some deep messages from and about Korea to the world? It argues that it does. Keywords: Entertainment; Comparative advantages; Services; Trade in services; Internet; Digital music; Technologies; Intellectual Property Rights; Culture; Koreanness. JEL classification: L82, O33, O34, Z1 Acknowledgements: We thank Dukgeun Ahn, Jinwoo Choi, Keun Lee, Walter G. Park and the participants to the seminars at the Graduate School of International Studies of Seoul National University, Hanyang University and STEPI (Science and Technology Policy Institute). -

アーティスト 商品名 品番 ジャンル名 定価 URL 100% (Korea) RE
アーティスト 商品名 品番 ジャンル名 定価 URL 100% (Korea) RE:tro: 6th Mini Album (HIP Ver.)(KOR) 1072528598 K-POP 2,290 https://tower.jp/item/4875651 100% (Korea) RE:tro: 6th Mini Album (NEW Ver.)(KOR) 1072528759 K-POP 2,290 https://tower.jp/item/4875653 100% (Korea) 28℃ <通常盤C> OKCK05028 K-POP 1,296 https://tower.jp/item/4825257 100% (Korea) 28℃ <通常盤B> OKCK05027 K-POP 1,296 https://tower.jp/item/4825256 100% (Korea) 28℃ <ユニット別ジャケット盤B> OKCK05030 K-POP 648 https://tower.jp/item/4825260 100% (Korea) 28℃ <ユニット別ジャケット盤A> OKCK05029 K-POP 648 https://tower.jp/item/4825259 100% (Korea) How to cry (Type-A) <通常盤> TS1P5002 K-POP 1,204 https://tower.jp/item/4415939 100% (Korea) How to cry (Type-B) <通常盤> TS1P5003 K-POP 1,204 https://tower.jp/item/4415954 100% (Korea) How to cry (ミヌ盤) <初回限定盤>(LTD) TS1P5005 K-POP 602 https://tower.jp/item/4415958 100% (Korea) How to cry (ロクヒョン盤) <初回限定盤>(LTD) TS1P5006 K-POP 602 https://tower.jp/item/4415970 100% (Korea) How to cry (ジョンファン盤) <初回限定盤>(LTD) TS1P5007 K-POP 602 https://tower.jp/item/4415972 100% (Korea) How to cry (チャンヨン盤) <初回限定盤>(LTD) TS1P5008 K-POP 602 https://tower.jp/item/4415974 100% (Korea) How to cry (ヒョクジン盤) <初回限定盤>(LTD) TS1P5009 K-POP 602 https://tower.jp/item/4415976 100% (Korea) Song for you (A) OKCK5011 K-POP 1,204 https://tower.jp/item/4655024 100% (Korea) Song for you (B) OKCK5012 K-POP 1,204 https://tower.jp/item/4655026 100% (Korea) Song for you (C) OKCK5013 K-POP 1,204 https://tower.jp/item/4655027 100% (Korea) Song for you メンバー別ジャケット盤 (ロクヒョン)(LTD) OKCK5015 K-POP 602 https://tower.jp/item/4655029 100% (Korea) -

K-Pop Fandom in Lima,Perú
Wesleyan ♦ University K-POP FANDOM IN LIMA, PERÚ: VIRTUAL AND LIVE CIRCULATION PATTERNS By Stephanie Ho Faculty Advisor: Dr. Mark Slobin A Dissertation submitted to the Faculty of Wesleyan University in partial fulfillment of the requirements for the degree of Master of Arts. Middletown, Connecticut MAY 2015 i Acknowledgements I would like to thank my advisor, Dr. Mark Slobin, for his invaluable guidance and insights during the process of writing this thesis. I am also immensely grateful to Dr. Su Zheng and Dr. Matthew Tremé for acting as members of my thesis committee and for their considered thoughts and comments on my early draft, which contributed greatly to the improvement of my work. I would also like to thank Gabrielle Misiewicz for her help with editing this thesis in its final stages, and most importantly for supporting me throughout our time together as classmates and friends. I thank the Peruvian fans that took the time to help me with my research, as well as Virginia and Violeta Chonn, who accompanied me on fieldwork visits and took the time to share their opinions with me regarding the Limeñan fandom. Thanks to my friends and colleagues at Wesleyan – especially Nicole Arulanantham, Gen Conte, Maho Ishiguro, Ellen Lueck, Joy Lu, and Ender Terwilliger – as well as Deb Shore from the Music Department, and Prof. Ann Wightman of the Latin American Studies Department. From my pre-Wesleyan life, I would like to acknowledge Francesca Zaccone, who introduced me to K-pop in 2009, and has always been up for discussing the K-pop world with me, be it for fun or for the purpose of helping me further my analyses. -

BTS, Digital Media, and Fan Culture
19 Hyunshik Ju Sungkyul University, South Korea Premediating a Narrative of Growth: BTS, Digital Media, and Fan Culture This article explores the landscape of fan engagements with BTS, the South Korean idol group. It offers a new approach to studying digital participation in fan culture. Digital fan‐based activity is singled out as BTS’s peculiarity in K‐pop’s history. Grusin’s discussion of ‘premediation’ is used to describe an autopoietic system for the construction of futuristic reality through online communication between BTS and ARMY, as the fans are called. As such, the BTS’s live performance is experienced through ARMY’s premediation, imaging new identities of ARMY as well as BTS. The way that fans engage digitally with BTS’s live performance is motivated by a narrative of growth of BTS with and for ARMY. As an agent of BTS’s success, ARMY is crucial in driving new economic trajectories for performative products and their audiences, radically intervening in the shape and scope of BTS’s contribution to a global market economy. Hunshik Ju graduated with Doctor of Korean Literature from Sogang University in South Korea. He is currently a full‐time lecturer at the department of Korean Literature and Language, Sungkyul University. Keywords: BTS, digital media fan culture, liveness, premediation Introduction South Korean (hereafter Korean) idol group called Bulletproof Boy AScouts (hereafter BTS) delivered a speech at the launch of “Generation Unlimited,” United Nations Children’s Fund’s (UNICEF) new youth agenda, at the United Nations General Assembly in New York on September 24, 2018. In his speech, BTS’s leader Kim Nam Jun (also known as “RM”) stressed the importance of self-love by stating that one must love oneself wholeheartedly regardless of the opinions and judgments of others.1 Such a message was not new to BTS fans, since the group’s songs usually raise concerns and reflections about young people’s personal growth. -
URL 100% (Korea)
アーティスト 商品名 オーダー品番 フォーマッ ジャンル名 定価(税抜) URL 100% (Korea) RE:tro: 6th Mini Album (HIP Ver.)(KOR) 1072528598 CD K-POP 1,603 https://tower.jp/item/4875651 100% (Korea) RE:tro: 6th Mini Album (NEW Ver.)(KOR) 1072528759 CD K-POP 1,603 https://tower.jp/item/4875653 100% (Korea) 28℃ <通常盤C> OKCK05028 Single K-POP 907 https://tower.jp/item/4825257 100% (Korea) 28℃ <通常盤B> OKCK05027 Single K-POP 907 https://tower.jp/item/4825256 100% (Korea) Summer Night <通常盤C> OKCK5022 Single K-POP 602 https://tower.jp/item/4732096 100% (Korea) Summer Night <通常盤B> OKCK5021 Single K-POP 602 https://tower.jp/item/4732095 100% (Korea) Song for you メンバー別ジャケット盤 (チャンヨン)(LTD) OKCK5017 Single K-POP 301 https://tower.jp/item/4655033 100% (Korea) Summer Night <通常盤A> OKCK5020 Single K-POP 602 https://tower.jp/item/4732093 100% (Korea) 28℃ <ユニット別ジャケット盤A> OKCK05029 Single K-POP 454 https://tower.jp/item/4825259 100% (Korea) 28℃ <ユニット別ジャケット盤B> OKCK05030 Single K-POP 454 https://tower.jp/item/4825260 100% (Korea) Song for you メンバー別ジャケット盤 (ジョンファン)(LTD) OKCK5016 Single K-POP 301 https://tower.jp/item/4655032 100% (Korea) Song for you メンバー別ジャケット盤 (ヒョクジン)(LTD) OKCK5018 Single K-POP 301 https://tower.jp/item/4655034 100% (Korea) How to cry (Type-A) <通常盤> TS1P5002 Single K-POP 843 https://tower.jp/item/4415939 100% (Korea) How to cry (ヒョクジン盤) <初回限定盤>(LTD) TS1P5009 Single K-POP 421 https://tower.jp/item/4415976 100% (Korea) Song for you メンバー別ジャケット盤 (ロクヒョン)(LTD) OKCK5015 Single K-POP 301 https://tower.jp/item/4655029 100% (Korea) How to cry (Type-B) <通常盤> TS1P5003 Single K-POP 843 https://tower.jp/item/4415954 -

Korean Culture and Hallyu
Korean Culture and Hallyu October 31, 2019 Binus University Andrew Eungi Kim Professor Division of International Studies Korea University Email: [email protected] PRESENTATION OUTLINE I. What is Culture II. Understanding Korean Culture in 5 Keywords III. Korean Wave: An Introduction IV. Hallyu I: K-Dramas V. Hallyu II: K-pop VI. The Impact of the Korean Wave VII. Factors for the Success of Hallyu VIII.Conclusion: The Future of Hallyu I. What is Culture? I. WHAT IS CULTURE? Q: What is the world population now? The world population today is 7.7 billion 2056: 10 billion 2100: 11.2 billion Q: How many cultures are there in the world? There are 195 countries The UN: number of distinct cultures → 10,000 What is culture? Culture refers to the distinct ways that people living in different parts of the world adapted creatively to the environment Culture consists of: Material Aspects Nonmaterial Aspects language foods ideas houses beliefs clothing customs tools tradition eating utensils values musical instruments gestures books laws art norms symbols family patterns toys political systems art music sports Question is: Out of the vast array of elements that constitute culture, what are the most important ones in understanding a new culture? Put in another way, what would be the 5 elements of culture which are fundamental for understanding a new culture? Out of the vast array of elements that constitute culture, the 5 most important ones in understanding a new culture are: 1. symbols 2. language 3. beliefs 4. norms 5. values Symbols Language Beliefs Culture Values Norms Surface Culture (10%) - What We See - Easy to See Deep Culture (90%) - What We Don’t See - Difficult to See - Invisible - Internal (deep) Culture II. -
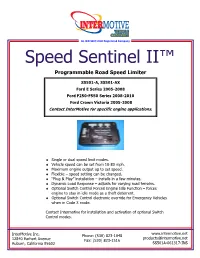
Speed Sentinel II™ Programmable Road Speed Limiter
An ISO 9001:2008 Registered Company Speed Sentinel II™ Programmable Road Speed Limiter SS501-A, SS501-AX Ford E Series 2005-2008 Ford F250-F550 Series 2008-2010 Ford Crown Victoria 2005-2008 Contact InterMotive for specific engine applications . ♦ Single or dual speed limit modes. ♦ Vehicle speed can be set from 10-80 mph. ♦ Maximum engine output up to set speed. ♦ Flexible – speed setting can be changed. ♦ “Plug & Play” installation – installs in a few minutes. ♦ Dynamic Load Response – adjusts for varying road terrains. ♦ Optional Switch Control Forced Engine Idle Function – forces engine to stay in idle mode as a theft deterrent. ♦ Optional Switch Control electronic override for Emergency Vehicles when in Code 3 mode. Contact Intermotive for installation and activation of optional Switch Control modes. www.intermotive.net InterMotive Inc. Phone: (530) 823-1048 12840 Earhart Avenue [email protected] Fax: (530) 823-1516 Auburn, California 95602 SS501A-061317-INS System Overview Speed Sentinel II is a programmable road speed limiter for Ford vehicles. Speed Sentinel II is a micro-processor controlled unit that limits maximum vehicle speed but does not limit maximum engine output. Speed Sentinel II interfaces with the vehicle through the use of “Plug & Play” connectors that plug directly into the vehicle’s factory OEM connectors. This method of installation reduces the installation time and improves the connection reliability. Speed Sentinel II has been designed with internal safeguards to insure the safe operation of the vehicle. If it senses any unsafe or unknown condition it automatically reverts back to full driver control. Speed Sentinel II can be set up for either single or dual speed operation. -

Marketing K-Pop and J-Pop in the 21St Century Sarah Brand Dickinson College
Dickinson College Dickinson Scholar Student Honors Theses By Year Student Honors Theses 5-21-2017 Marketing K-Pop and J-Pop in the 21st Century Sarah Brand Dickinson College Follow this and additional works at: http://scholar.dickinson.edu/student_honors Part of the Asian Studies Commons, Digital Humanities Commons, Japanese Studies Commons, Korean Studies Commons, Music Commons, and the Other Film and Media Studies Commons Recommended Citation Brand, Sarah, "Marketing K-Pop and J-Pop in the 21st Century" (2017). Dickinson College Honors Theses. Paper 266. This Honors Thesis is brought to you for free and open access by Dickinson Scholar. It has been accepted for inclusion by an authorized administrator. For more information, please contact [email protected]. MARKETING K-POP AND J-POP IN THE 21ST CENTURY Sarah Brand Senior Thesis Department of East Asian Studies Dickinson College May 10, 2017 Brand 2017 Music is an important part of daily life and, as a result, an integral part of culture. The way in which individuals are exposed to different genres and types of music helps illustrate the extent to which globalization has had an impact on the world. Before the invention of the internet, music was only available for purchase to consumers who went to record stores and physically purchased goods. Now, countless unique songs and genres are readily available with just a single search. Due to how easily consumers can access new music, digital distribution has completely overtaken the profit from selling physical copies of albums. In 2006, record labels still made $9.4 billion from CD sales in the United States, despite the fact that digital distribution entities, such as Napster and iTunes, provided digital copies of the same songs. -
Catching the K-Pop Wave: Globality in the Production, Distribution, and Consumption of South Korean Popular Music Sarah Leung
Vassar College Digital Window @ Vassar Senior Capstone Projects 2012 Catching the K-Pop Wave: Globality in the Production, Distribution, and Consumption of South Korean Popular Music Sarah Leung Follow this and additional works at: http://digitalwindow.vassar.edu/senior_capstone Part of the Film and Media Studies Commons Recommended Citation Leung, Sarah, "Catching the K-Pop Wave: Globality in the Production, Distribution, and Consumption of South Korean Popular Music" (2012). Senior Capstone Projects. 149. http://digitalwindow.vassar.edu/senior_capstone/149 This Open Access is brought to you for free and open access by Digital Window @ Vassar. It has been accepted for inclusion in Senior Capstone Projects by an authorized administrator of Digital Window @ Vassar. For more information, please contact [email protected]. Catching the K-Pop Wave: Globality in the Production, Distribution, and Consumption of South Korean Popular Music Sarah Leung Media Studies Senior Thesis Thesis Adviser: Tarik Elseewi April 20, 2012 Chapter List: I. Going with the Flow: K-Pop and the Hallyu Wave…….…………………………………2 1. Introduction…………………………………………………..……………………2 2. So What is K-Pop? Local vs. Global Identities……………...…………….…….10 II. Making the Band: K-Pop Production………………….…….…….….….………………25 1. The Importance of Image……………………………………………..………….25 2. Idol Recruitment, Training, and Maintenance………………………….…..……28 III. Around the World: Patterns of K-Pop Consumption…………….….….…….………….34 1. Where is K-Pop being Consumed? …………………….….…………………….34 2. Interculture, Transnational Identity, and Resistance……...……………….……..42 IV. Crazed! The “Pop” in K-Pop………………………………………………………….…48 1. H.O.T.? Issues of Gender and Sexuality in K-Pop’s Appeal……..…..………….48 2. Fan Culture and Media Convergence………………...……………………….…69 V. Conclusions……………………………………………..………………………….…….77 Bibliography…………………………………………………………………………………85 Leung 1 I. -

Shinee” As Perceived by K-Popers “Shinee World Indonesia” in Karawang Regency
International Journal of Engineering & Technology, 7 (3.30) (2018) 74-79 International Journal of Engineering & Technology Website: www.sciencepubco.com/index.php/IJET Research paper Fanaticism of a Korean Boy Band, “Shinee” as Perceived by K-Popers “Shinee World Indonesia” in Karawang Regency Zainal Abidin1*, Yanti Tayo2, Mayasari3 1 Communication Studies Department, FISIP UNSIKA 2 Communication Studies Department, FISIP UNSIKA 3 Communication Studies Department, FISIP UNSIKA * Corresponding author E-mail: [email protected], [email protected], [email protected] Abstract Korean popular music, or broadly known as K-Pop, is the most noticeable example of hallyu-wave products. Actors, actresses, soloists, duos, and groups consisting of several members are considered as K-Pop performers. In Korea, such performers are popular by the term “idol”. Those who idolize a particular idol, whether it is soloist or group, often join a fans-club called “fandom”. Teenagers as common members of fandom will identify and try to behave in similar way to their idols. Looking at that phenomenon, this study aims to find the motive behind K-Popers “SHINee World Indonesia” fanaticism of a Korean boy band, SHINee. This study applies qualitative method, a research method which is defined as an attempt to get a better understanding regarding the com- plexity of human interaction. It results in several keywords of qualitative research: process, understanding, complexity, interaction, and human. The researchers adopt qualitative method with phenomenology approach, due to the fact that the research object is closely related to the motive behind K-popers fanatics and their imitative behavior. The researchers realize that the motive and imitative behavior of K- Popers fanatics are processed within themselves, not by the visible behaviors in the outside. -

The Aesthetic Style of Korean Singers in Japan: a Review of Hallyu from the Perspective of Fashion
International Journal of Business and Social Science Vol. 2 No. 19 [Special Issue - October 2011] The Aesthetic Style of Korean Singers in Japan: A Review of Hallyu from the Perspective of Fashion Judy Park, PhD Seoul National University Department of Clothing and Textiles & Lecturer Donduk Women‟s University Seoul, Korea Abstract Hallyu means “Korean wave” and refers to the phenomenon of Korean popular culture gaining immense popularity overseas, mostly in Asian countries. Hallyu started with Korean TV dramas being exported to nearby countries, but the new hallyu of recent years is being led by young K-pop singers. Meanwhile, the Korean fashion industry is still struggling to make a mark in the international market. This study aimed to examine the clothing styles of new hallyu singers in Japan, focusing on the year 2010, to extract the aesthetic characteristics and analyze why the styles are well received in the Japanese market to ultimately present indicators of possible directions for both Korean fashion and entertainment to succeed in the international market in the future. Hallyu singers were found to appeal to their Japanese audience with a unique and different style, cute and approachable elements and a slim silhouette, along with shy and polite body language that added to the image of gentleness already created through Korean TV shows. 1. Introduction As Coco Chanel said, “Fashion is not something that exists in dresses only. Fashion is in the sky, in the street, fashion has to do with ideas, the way we live, what is happening.” In other words, fashion is a core part of life that is influenced by and reflects our minds and lifestyles. -

DWB Music Ltd
DWB MUSIC LTD Journey to Success in Asia Who is DWB? DWB Paul Drew Greig Watts Pete Barringer • Guitarist • Publishing • Keyboard • Writer • Top line • Drummer • Producer • Lyrics • Writer • Producer DWB MUSIC LTD Journey to Success in Asia But DWB is more than this . Ricky Hanley Chicks with Hits DWB Ian Christopher Curnow Wortley Georgie Dennis & Steven Lee Bill Padley DWB MUSIC LTD Journey to Success in Asia DWB at midem . midem Asian partners DWB Strong partnerships forged with Asia through midem Early successes • D-side Their album Gravity includes 6 of our written/produced songs. Collecting • Tohoshinki (TVXQ) Royalties DWB wrote Dead End which helped TVXQ cross from Korea into Japan. DWB MUSIC LTD Journey to Success in Asia Asia is good at exploiting all opportunities . Original Song Japanese lyrics 500,000 copies in total Dead End (80,000 copies) Released again on album ‘7’ (250,000 copies) Remixed as second track on Purple Line Number 1 (100,000 copies) Remixed version released on new album Secret Code (150,000 copies) DWB MUSIC LTD Journey to Success in Asia 2009 / 2010 – Building our reputation with cuts . • Singapore:- Joey Yeung released our song Expose which was translated and released as a Mandarin song • Japan:- Vanilla Beans released Gamla Stan • China and Taiwan:- SHIN released Hey Now • Japan:- Shinwha released Learning How to Breath • Taiwan:- Jane Zhang relaesd I Do • Korea:- SS501, released Young Won To Rok • Taiwan:- Y2J (Yumming 2 Jane) released Come On • And some others . DWB MUSIC LTD Journey to Success in Asia We’ve found a good way of working with our partners Many Western writers hear that Japan and Korea can be a big market and so they try writing copies of J-Pop and K-Pop.