80X86 Instruction Reference Instructions Are Listed in This
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Microprocessor's Registers
IT Basics The microprocessor and ASM Prof. Răzvan Daniel Zota, Ph.D. Bucharest University of Economic Studies Faculty of Cybernetics, Statistics and Economic Informatics [email protected] http://zota.ase.ro/itb Contents • Basic microprocessor architecture • Intel microprocessor registers • Instructions – their components and format • Addressing modes (with examples) 2 Basic microprocessor architecture • CPU registers – Special memory locations on the microprocessor chip – Examples: accumulator, counter, FLAGS register • Arithmetic-Logic Unit (ALU) – The place where most of the operations are being made inside the CPU • Bus Interface Unit (BIU) – It controls data and address buses when the main memory is accessed (or data from the cache memory) • Control Unit and instruction set – The CPU has a fixed instruction set for working with (examples: MOV, CMP, JMP) 3 Instruction’s processing • Processing an instruction requires 3 basic steps: 1. Fetching the instruction from memory (fetch) 2. Instruction’s decoding (decode) 3. Instruction’s execution (execute) – implies memory access for the operands and storing the result • Operation mode of an “antique” Intel 8086 Fetch Decode Execute Fetch Decode Execute …... Microprocessor 1 1 1 2 2 2 Busy Idle Busy Busy Idle Busy …... Bus 4 Instruction’s processing • Modern microprocessors may process more instructions simultaneously (pipelining) • Operation of a pipeline microprocessor (from Intel 80486 to our days) Fetch Fetch Fetch Fetch Store Fetch Fetch Read Fetch 1 2 3 4 1 5 6 2 7 Bus Unit Decode Decode -

X86 Assembly Language Syllabus for Subject: Assembly (Machine) Language
VŠB - Technical University of Ostrava Department of Computer Science, FEECS x86 Assembly Language Syllabus for Subject: Assembly (Machine) Language Ing. Petr Olivka, Ph.D. 2021 e-mail: [email protected] http://poli.cs.vsb.cz Contents 1 Processor Intel i486 and Higher – 32-bit Mode3 1.1 Registers of i486.........................3 1.2 Addressing............................6 1.3 Assembly Language, Machine Code...............6 1.4 Data Types............................6 2 Linking Assembly and C Language Programs7 2.1 Linking C and C Module....................7 2.2 Linking C and ASM Module................... 10 2.3 Variables in Assembly Language................ 11 3 Instruction Set 14 3.1 Moving Instruction........................ 14 3.2 Logical and Bitwise Instruction................. 16 3.3 Arithmetical Instruction..................... 18 3.4 Jump Instructions........................ 20 3.5 String Instructions........................ 21 3.6 Control and Auxiliary Instructions............... 23 3.7 Multiplication and Division Instructions............ 24 4 32-bit Interfacing to C Language 25 4.1 Return Values from Functions.................. 25 4.2 Rules of Registers Usage..................... 25 4.3 Calling Function with Arguments................ 26 4.3.1 Order of Passed Arguments............... 26 4.3.2 Calling the Function and Set Register EBP...... 27 4.3.3 Access to Arguments and Local Variables....... 28 4.3.4 Return from Function, the Stack Cleanup....... 28 4.3.5 Function Example.................... 29 4.4 Typical Examples of Arguments Passed to Functions..... 30 4.5 The Example of Using String Instructions........... 34 5 AMD and Intel x86 Processors – 64-bit Mode 36 5.1 Registers.............................. 36 5.2 Addressing in 64-bit Mode.................... 37 6 64-bit Interfacing to C Language 37 6.1 Return Values.......................... -

(PSW). Seven Bits Remain Unused While the Rest Nine Are Used
8086/8088MP INSTRUCTOR: ABDULMUTTALIB A. H. ALDOURI The Flags Register It is a 16-bit register, also called Program Status Word (PSW). Seven bits remain unused while the rest nine are used. Six are status flags and three are control flags. The control flags can be set/reset by the programmer. 1. DF (Direction Flag) : controls the direction of operation of string instructions. (DF=0 Ascending order DF=1 Descending order) 2. IF (Interrupt Flag): controls the interrupt operation in 8086µP. (IF=0 Disable interrupt IF=1 Enable interrupt) 3. TF (Trap Flag): controls the operation of the microprocessor. (TF=0 Normal operation TF=1 Single Step operation) The status flags are set/reset depending on the results of some arithmetic or logical operations during program execution. 1. CF (Carry Flag) is set (CF=1) if there is a carry out of the MSB position resulting from an addition operation or subtraction. 2. AF (Auxiliary Carry Flag) AF is set if there is a carry out of bit 3 resulting from an addition operation. 3. SF (Sign Flag) set to 1 when result is negative. When result is positive it is set to 0. 4. ZF (Zero Flag) is set (ZF=1) when result of an arithmetic or logical operation is zero. For non-zero result this flag is reset (ZF=0). 5. PF (Parity Flag) this flag is set to 1 when there is even number of one bits in result, and to 0 when there is odd number of one bits. 6. OF (Overflow Flag) set to 1 when there is a signed overflow. -

Overview of IA-32 Assembly Programming
Overview of IA-32 assembly programming Lars Ailo Bongo University of Tromsø Contents 1 Introduction ...................................................................................................................... 2 2 IA-32 assembly programming.......................................................................................... 3 2.1 Assembly Language Statements................................................................................ 3 2.1 Modes........................................................................................................................4 2.2 Registers....................................................................................................................4 2.2.3 Data Registers .................................................................................................... 4 2.2.4 Pointer and Index Registers................................................................................ 4 2.2.5 Control Registers................................................................................................ 5 2.2.6 Segment registers ............................................................................................... 7 2.3 Addressing................................................................................................................. 7 2.3.1 Bit and Byte Order ............................................................................................. 7 2.3.2 Data Types......................................................................................................... -
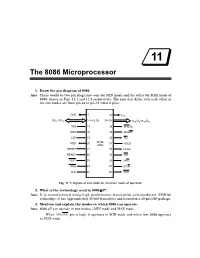
The 8086 Microprocessor
11 The 8086 Microprocessor 1. Draw the pin diagram of 8086. Ans. There would be two pin diagrams—one for MIN mode and the other for MAX mode of 8086, shown in Figs. 11.1 and 11.2 respectively. The pins that differ with each other in the two modes are from pin-24 to pin-31 (total 8 pins). GND 1 40 VCC AD –AD 35–38 0 15 2–16 & 39 A/S16 3–A/S 19 6 NMI 17 34 BHE/S7 INTR 18 33 MN/MX CLK 19 32 RD INTEL GND 20 31 HOLD 8086 RESET 21 30 HLDA READY 22 29 WR TEST 23 28 M/IO INTA 24 27 DT/R ALE 25 26 DEN Fig. 11.1: Signals of intel 8086 for minimum mode of operation 2. What is the technology used in 8086 µµµP? Ans. It is manufactured using high performance metal-oxide semiconductor (HMOS) technology. It has approximately 29,000 transistors and housed in a 40-pin DIP package. 3. Mention and explain the modes in which 8086 can operate. Ans. 8086 µP can operate in two modes—MIN mode and MAX mode. When MN/MX pin is high, it operates in MIN mode and when low, 8086 operates in MAX mode. 194 Understanding 8085/8086 Microprocessors and Peripheral ICs through Questions and Answers For a small system in which only one 8086 microprocessor is employed as a CPU, the system operates in MIN mode (Uniprocessor). While if more than one 8086 operate in a system then it is said to operate in MAX mode (Multiprocessor). -

Optimizing Subroutines in Assembly Language an Optimization Guide for X86 Platforms
2. Optimizing subroutines in assembly language An optimization guide for x86 platforms By Agner Fog. Copenhagen University College of Engineering. Copyright © 1996 - 2012. Last updated 2012-02-29. Contents 1 Introduction ....................................................................................................................... 4 1.1 Reasons for using assembly code .............................................................................. 5 1.2 Reasons for not using assembly code ........................................................................ 5 1.3 Microprocessors covered by this manual .................................................................... 6 1.4 Operating systems covered by this manual................................................................. 7 2 Before you start................................................................................................................. 7 2.1 Things to decide before you start programming .......................................................... 7 2.2 Make a test strategy.................................................................................................... 9 2.3 Common coding pitfalls............................................................................................. 10 3 The basics of assembly coding........................................................................................ 12 3.1 Assemblers available ................................................................................................ 12 3.2 Register set -
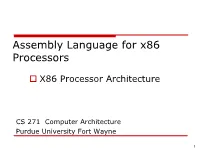
Assembly Language: IA-X86
Assembly Language for x86 Processors X86 Processor Architecture CS 271 Computer Architecture Purdue University Fort Wayne 1 Outline Basic IA Computer Organization IA-32 Registers Instruction Execution Cycle Basic IA Computer Organization Since the 1940's, the Von Neumann computers contains three key components: Processor, called also the CPU (Central Processing Unit) Memory and Storage Devices I/O Devices Interconnected with one or more buses Data Bus Address Bus data bus Control Bus registers Processor I/O I/O IA: Intel Architecture Memory Device Device (CPU) #1 #2 32-bit (or i386) ALU CU clock control bus address bus Processor The processor consists of Datapath ALU Registers Control unit ALU (Arithmetic logic unit) Performs arithmetic and logic operations Control unit (CU) Generates the control signals required to execute instructions Memory Address Space Address Space is the set of memory locations (bytes) that are addressable Next ... Basic Computer Organization IA-32 Registers Instruction Execution Cycle Registers Registers are high speed memory inside the CPU Eight 32-bit general-purpose registers Six 16-bit segment registers Processor Status Flags (EFLAGS) and Instruction Pointer (EIP) 32-bit General-Purpose Registers EAX EBP EBX ESP ECX ESI EDX EDI 16-bit Segment Registers EFLAGS CS ES SS FS EIP DS GS General-Purpose Registers Used primarily for arithmetic and data movement mov eax 10 ;move constant integer 10 into register eax Specialized uses of Registers eax – Accumulator register Automatically -

Design of the RISC-V Instruction Set Architecture
Design of the RISC-V Instruction Set Architecture Andrew Waterman Electrical Engineering and Computer Sciences University of California at Berkeley Technical Report No. UCB/EECS-2016-1 http://www.eecs.berkeley.edu/Pubs/TechRpts/2016/EECS-2016-1.html January 3, 2016 Copyright © 2016, by the author(s). All rights reserved. Permission to make digital or hard copies of all or part of this work for personal or classroom use is granted without fee provided that copies are not made or distributed for profit or commercial advantage and that copies bear this notice and the full citation on the first page. To copy otherwise, to republish, to post on servers or to redistribute to lists, requires prior specific permission. Design of the RISC-V Instruction Set Architecture by Andrew Shell Waterman A dissertation submitted in partial satisfaction of the requirements for the degree of Doctor of Philosophy in Computer Science in the Graduate Division of the University of California, Berkeley Committee in charge: Professor David Patterson, Chair Professor Krste Asanovi´c Associate Professor Per-Olof Persson Spring 2016 Design of the RISC-V Instruction Set Architecture Copyright 2016 by Andrew Shell Waterman 1 Abstract Design of the RISC-V Instruction Set Architecture by Andrew Shell Waterman Doctor of Philosophy in Computer Science University of California, Berkeley Professor David Patterson, Chair The hardware-software interface, embodied in the instruction set architecture (ISA), is arguably the most important interface in a computer system. Yet, in contrast to nearly all other interfaces in a modern computer system, all commercially popular ISAs are proprietary. -

Intel X86 Assembly Language & Microarchitecture
Intel x86 Assembly Language & Microarchitecture #x86 Table of Contents About 1 Chapter 1: Getting started with Intel x86 Assembly Language & Microarchitecture 2 Remarks 2 Examples 2 x86 Assembly Language 2 x86 Linux Hello World Example 3 Chapter 2: Assemblers 6 Examples 6 Microsoft Assembler - MASM 6 Intel Assembler 6 AT&T assembler - as 7 Borland's Turbo Assembler - TASM 7 GNU assembler - gas 7 Netwide Assembler - NASM 8 Yet Another Assembler - YASM 9 Chapter 3: Calling Conventions 10 Remarks 10 Resources 10 Examples 10 32-bit cdecl 10 Parameters 10 Return Value 11 Saved and Clobbered Registers 11 64-bit System V 11 Parameters 11 Return Value 11 Saved and Clobbered Registers 11 32-bit stdcall 12 Parameters 12 Return Value 12 Saved and Clobbered Registers 12 32-bit, cdecl — Dealing with Integers 12 As parameters (8, 16, 32 bits) 12 As parameters (64 bits) 12 As return value 13 32-bit, cdecl — Dealing with Floating Point 14 As parameters (float, double) 14 As parameters (long double) 14 As return value 15 64-bit Windows 15 Parameters 15 Return Value 16 Saved and Clobbered Registers 16 Stack alignment 16 32-bit, cdecl — Dealing with Structs 16 Padding 16 As parameters (pass by reference) 17 As parameters (pass by value) 17 As return value 17 Chapter 4: Control Flow 19 Examples 19 Unconditional jumps 19 Relative near jumps 19 Absolute indirect near jumps 19 Absolute far jumps 19 Absolute indirect far jumps 20 Missing jumps 20 Testing conditions 20 Flags 21 Non-destructive tests 21 Signed and unsigned tests 22 Conditional jumps 22 Synonyms and terminology 22 Equality 22 Greater than 23 Less than 24 Specific flags 24 One more conditional jump (extra one) 25 Test arithmetic relations 25 Unsigned integers 25 Signed integers 26 a_label 26 Synonyms 27 Signed unsigned companion codes 27 Chapter 5: Converting decimal strings to integers 28 Remarks 28 Examples 28 IA-32 assembly, GAS, cdecl calling convention 28 MS-DOS, TASM/MASM function to read a 16-bit unsigned integer 29 Read a 16-bit unsigned integer from input. -

Implicitly Modified Registers
24592—Rev. 3.14—September 2007 AMD64 Technology Table 3-1. Implicit Uses of GPRs Registers 1 Name Implicit Uses Low 8-Bit 16-Bit 32-Bit 64-Bit • Operand for decimal arithmetic, multiply, divide, string, compare-and- exchange, table-translation, and I/O instructions. 2 • Special accumulator encoding AL AX EAX RAX Accumulator for ADD, XOR, and MOV instructions. • Used with EDX to hold double- precision operands. • CPUID processor-feature information. • Address generation in 16-bit code. • Memory address for XLAT BL BX EBX RBX 2 Base instruction. • CPUID processor-feature information. • Bit index for shift and rotate instructions. • Iteration count for loop and CL CX ECX RCX 2 Count repeated string instructions. • Jump conditional if zero. • CPUID processor-feature information. • Operand for multiply and divide instructions. • Port number for I/O instructions. DL DX EDX RDX 2 I/O Address • Used with EAX to hold double- precision operands. • CPUID processor-feature information. • Memory address of source operand for string instructions. SIL 2 SI ESI RSI 2 Source Index • Memory index for 16-bit addresses. Note: 1. Gray-shaded registers have no implicit uses. 2. Accessible only in 64-bit mode. General-Purpose Programming 31 AMD64 Technology 24592—Rev. 3.14—September 2007 Table 3-1. Implicit Uses of GPRs (continued) Registers 1 Name Implicit Uses Low 8-Bit 16-Bit 32-Bit 64-Bit • Memory address of destination Destination operand for string instructions. DIL 2 DI EDI RDI 2 Index • Memory index for 16-bit addresses. • Memory address of stack- BPL 2 BP EBP RBP 2 Base Pointer frame base pointer. -

Assembly Language Tutorial
Assembly Language Tutorial ASSEMBLY LANGUAGE TUTORIAL Simply Easy Learning by tutorialspoint.com tutorialspoint.com i ABOUT THE TUTORIAL Assembly Programming Tutorial Assembly language is a low-level programming language for a computer, or other programmable device specific to a particular computer architecture in contrast to most high- level programming languages, which are generally portable across multiple systems. Assembly language is converted into executable machine code by a utility program referred to as an assembler like NASM, MASM etc. Audience This tutorial has been designed for software programmers with a need to understand the Assembly programming language starting from scratch. This tutorial will give you enough understanding on Assembly programming language from where you can take yourself at higher level of expertise. Prerequisites Before proceeding with this tutorial you should have a basic understanding of Computer Programming terminologies. A basic understanding of any of the programming languages will help you in understanding the Assembly programming concepts and move fast on the learning track. TUTORIALS POINT Simply Easy Learning Copyright & Disclaimer Notice All the content and graphics on this tutorial are the property of tutorialspoint.com. Any content from tutorialspoint.com or this tutorial may not be redistributed or reproduced in any way, shape, or form without the written permission of tutorialspoint.com. Failure to do so is a violation of copyright laws. This tutorial may contain inaccuracies or errors and tutorialspoint provides no guarantee regarding the accuracy of the site or its contents including this tutorial. If you discover that the tutorialspoint.com site or this tutorial content contains some errors, please contact us at [email protected] TUTORIALS POINT Simply Easy Learning Table of Content Assembly Programming Tutorial ............................................. -
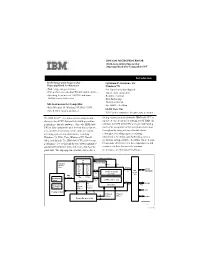
Introduction
IBM 6x86 MICROPROCRSSOR Sixth-Generation Superscalar Superpipelined x86-Compatible CPU Introduction S i x t h - G e n e r a t i o n S u p e r s c a l a r Optimum Performance for Superpipelined Architecture Windows®95 - Dual 7-stage integer pipelines - Intelligent instruction dispatch - High performance on-chip FPU with 64-bit interface - Out-of-order completion - Operating frequencies of 100 MHz and above - Register renaming - 16-KByte write-back cache - Data forwarding - Branch prediction X86 Instruction Set Compatible - Speculative execution - Runs Windows 95, Windows NT, DOS, UNIX, 64-Bit Data Bus Novell, OS/2, Solaris, and others - P54C socket compatible for quick time to market The IBM 6x86** microprocessor is a superscalar, timing constraints and allows the IBM 6x86 CPU to superpipelined CPU that provides sixth-generation operate at core frequencies starting at 100 MHz. In performance for x86 software. Since the IBM 6x86 addition, the IBM 6x86 CPU’s integer and floating CPU is fully compatible with the x86 instruction set, point units are optimized for maximum instruction it is capable of executing a wide range of existing throughput by using advanced architectural operating systems and applications, including techniques, including register renaming, Windows 95, DOS, Unix, Windows NT, Novell, out-of-order execution, data forwarding, branch OS/2, and Solaris. The IBM 6x86 CPU achieves top prediction, and speculative execution. These design performance levels through the use of two optimized innovations eliminate many data dependencies and superpipelined integer units and an on-chip floating resource conflicts that provide optimum point unit.