July 2014 Supplement: Rescue Robotics
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Humanoid Robots – from Fiction to Reality?
KI-Zeitschrift, 4/08, pp. 5-9, December 2008 Humanoid Robots { From Fiction to Reality? Sven Behnke Humanoid robots have been fascinating people ever since the invention of robots. They are the embodiment of artificial intelligence. While in science fiction, human-like robots act autonomously in complex human-populated environments, in reality, the capabilities of humanoid robots are quite limited. This article reviews the history of humanoid robots, discusses the state-of-the-art and speculates about future developments in the field. 1 Introduction 1495 Leonardo da Vinci designed and possibly built a mechan- ical device that looked like an armored knight. It was designed Humanoid robots, robots with an anthropomorphic body plan to sit up, wave its arms, and move its head via a flexible neck and human-like senses, are enjoying increasing popularity as re- while opening and closing its jaw. By the eighteenth century, search tool. More and more groups worldwide work on issues like elaborate mechanical dolls were able to write short phrases, play bipedal locomotion, dexterous manipulation, audio-visual per- musical instruments, and perform other simple, life-like acts. ception, human-robot interaction, adaptive control, and learn- In 1921 the word robot was coined by Karel Capek in its ing, targeted for the application in humanoid robots. theatre play: R.U.R. (Rossum's Universal Robots). The me- These efforts are motivated by the vision to create a new chanical servant in the play had a humanoid appearance. The kind of tool: robots that work in close cooperation with hu- first humanoid robot to appear in the movies was Maria in the mans in the same environment that we designed to suit our film Metropolis (Fritz Lang, 1926). -

A Humanoid Robot
NAIN 1.0 – A HUMANOID ROBOT by Shivam Shukla (1406831124) Shubham Kumar (1406831131) Shashank Bhardwaj (1406831117) Department of Electronics & Communication Engineering Meerut Institute of Engineering & Technology Meerut, U.P. (India)-250005 May, 2018 NAIN 1.0 – HUMANOID ROBOT by Shivam Shukla (1406831124) Shubham Kumar (1406831131) Shashank Bhardwaj (1406831117) Submitted to the Department of Electronics & Communication Engineering in partial fulfillment of the requirements for the degree of Bachelor of Technology in Electronics & Communication Meerut Institute of Engineering & Technology, Meerut Dr. A.P.J. Abdul Kalam Technical University, Lucknow May, 2018 DECLARATION I hereby declare that this submission is my own work and that, to the best of my knowledge and belief, it contains no material previously published or written by another person nor material which to a substantial extent has been accepted for the award of any other degree or diploma of the university or other institute of higher learning except where due acknowledgment has been made in the text. Signature Signature Name: Mr. Shivam Shukla Name: Mr. Shashank Bhardwaj Roll No. 1406831124 Roll No. 1406831117 Date: Date: Signature Name: Mr. Shubham Kumar Roll No. 1406831131 Date: ii CERTIFICATE This is to certify that Project Report entitled “Humanoid Robot” which is submitted by Shivam Shukla (1406831124), Shashank Bhardwaj (1406831117), Shubahm Kumar (1406831131) in partial fulfillment of the requirement for the award of degree B.Tech in Department of Electronics & Communication Engineering of Gautam Buddh Technical University (Formerly U.P. Technical University), is record of the candidate own work carried out by him under my/our supervision. The matter embodied in this thesis is original and has not been submitted for the award of any other degree. -

Boletin Septiembre
Boletín Electrónico Rama de Estudiantes de la UNED Septiembre-2011 EDITOR AGRADECIMIENTOS Miguel Latorre Vicerrectorado de Investigación UNED ([email protected]) Vicerrectorado de Estudiantes y Desarrollo Profesional UNED Escuela Técnica Superior de Ingenieros REVISORES Industriales UNED Manuel Castro Escuela Técnica Superior de Ingenieros Miguel Latorre Informáticos UNED Germán Carro Sección Española del IEEE Departamento de Ingeniería Eléctrica, Electrónica y de Control (DIEEC) UNED DISEÑO PORTADA IEEE Women In Engineering (WIE) Sergio Martín AGRADECIMIENTO ESPECIAL AUTORES Agradecemos a nuestro Catedrático de Germán Carro Tecnología Electrónica y Profesor Núria Girbau Consejero de la Rama, Manuel Castro, Francisco J. Caneda todo el tiempo y la dedicación que nos Miguel Latorre presta, así como, el habernos dado la Mohamed Tawfik posibilidad de colaborar con el Capítulo Español de la Sociedad de Educación del IEEE para la elaboración del mismo. Agradecemos a todos los autores, y a aquellos que han colaborado para hacer posible este Boletín Electrónico. BOLETÍN DESARROLLADO EN COLABORACIÓN CON EL CAPÍTULO ESPAÑOL DE LA SOCIEDAD DE EDUCACIÓN DEL IEEE Junta Directiva 2010-2012 Germán Carro Fernández. Actualmente, también colabora con Presidente de la Rama de el departamento de ingeniería Estudiantes del IEEE-UNED. eléctrica electrónica y de control Economista, Ingeniero Técnico en (DIEEC) de la UNED en proyectos Informática de Sistemas y relacionados con objetos de Estudiante del Master en el aprendizaje. Departamento de IEEC en la ETSII [email protected] de la UNED. En años anteriores ha colaborado con la Junta Directiva Ramón Carrasco. Vicepresidente de como Vicepresidente y como zona - A Coruña.. Licenciado en Coordinador de Actividades Ciencias Física, especialidad Generales. -
The Tip of a Hospitality Revolution (5:48 Mins) Listening Comprehension with Pre-Listening and Post-Listening Exercises Pre-List
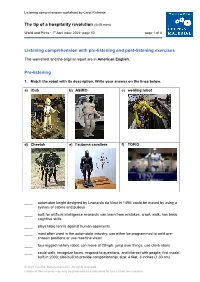
Listening comprehension worksheet by Carol Richards The tip of a hospitality revolution (5:48 mins) World and Press • 1st April issue 2021• page 10 page 1 of 8 Listening comprehension with pre-listening and post-listening exercises This worksheet and the original report are in American English. Pre-listening 1. Match the robot with its description. Write your answer on the lines below. a) iCub b) ASIMO c) welding robot d) Cheetah e) l’automa cavaliere f) TOPIO ____ automaton knight designed by Leonardo da Vinci in 1495; could be moved by using a system of cables and pulleys ____ built for artificial intelligence research; can learn from mistakes, crawl, walk; has basic cognitive skills ____ plays table tennis against human opponents ____ most often used in the automobile industry; can either be programmed to weld pre- chosen positions or use machine vision ____ four-legged military robot, can move at 28mph, jump over things, use climb stairs ____ could walk, recognize faces, respond to questions, and interact with people; first model built in 2000; also built to provide companionship; size: 4 feet, 3 inches (1.30 cm) © 2021 Carl Ed. Schünemann KG. All rights reserved. Copies of this material may only be produced by subscribers for use in their own lessons. The tip of a hospitality revolution World and Press • April 1 / 2021 • page 10 page 2 of 8 2. Vocabulary practice Match the terms on the left with their German meanings on the right. Write your answers in the grid below. a) billion A Abfindung b) competitive advantage B auf etw. -

Design and Realization of a Humanoid Robot for Fast and Autonomous Bipedal Locomotion
TECHNISCHE UNIVERSITÄT MÜNCHEN Lehrstuhl für Angewandte Mechanik Design and Realization of a Humanoid Robot for Fast and Autonomous Bipedal Locomotion Entwurf und Realisierung eines Humanoiden Roboters für Schnelles und Autonomes Laufen Dipl.-Ing. Univ. Sebastian Lohmeier Vollständiger Abdruck der von der Fakultät für Maschinenwesen der Technischen Universität München zur Erlangung des akademischen Grades eines Doktor-Ingenieurs (Dr.-Ing.) genehmigten Dissertation. Vorsitzender: Univ.-Prof. Dr.-Ing. Udo Lindemann Prüfer der Dissertation: 1. Univ.-Prof. Dr.-Ing. habil. Heinz Ulbrich 2. Univ.-Prof. Dr.-Ing. Horst Baier Die Dissertation wurde am 2. Juni 2010 bei der Technischen Universität München eingereicht und durch die Fakultät für Maschinenwesen am 21. Oktober 2010 angenommen. Colophon The original source for this thesis was edited in GNU Emacs and aucTEX, typeset using pdfLATEX in an automated process using GNU make, and output as PDF. The document was compiled with the LATEX 2" class AMdiss (based on the KOMA-Script class scrreprt). AMdiss is part of the AMclasses bundle that was developed by the author for writing term papers, Diploma theses and dissertations at the Institute of Applied Mechanics, Technische Universität München. Photographs and CAD screenshots were processed and enhanced with THE GIMP. Most vector graphics were drawn with CorelDraw X3, exported as Encapsulated PostScript, and edited with psfrag to obtain high-quality labeling. Some smaller and text-heavy graphics (flowcharts, etc.), as well as diagrams were created using PSTricks. The plot raw data were preprocessed with Matlab. In order to use the PostScript- based LATEX packages with pdfLATEX, a toolchain based on pst-pdf and Ghostscript was used. -

Design of a Drone with a Robotic End-Effector
Design of a Drone with a Robotic End-Effector Suhas Varadaramanujan, Sawan Sreenivasa, Praveen Pasupathy, Sukeerth Calastawad, Melissa Morris, Sabri Tosunoglu Department of Mechanical and Materials Engineering Florida International University Miami, Florida 33174 [email protected], [email protected] , [email protected], [email protected], [email protected], [email protected] ABSTRACT example, the widely-used predator drone for military purposes is the MQ-1 by General Atomics which is remote controlled, UAVs The concept presented involves a combination of a quadcopter typically fall into one of six functional categories (i.e. target and drone and an end-effector arm, which is designed with the decoy, reconnaissance, combat, logistics, R&D, civil and capability of lifting and picking fruits from an elevated position. commercial). The inspiration for this concept was obtained from the swarm robots which have an effector arm to pick small cubes, cans to even With the advent of aerial robotics technology, UAVs became more collecting experimental samples as in case of space exploration. sophisticated and led to development of quadcopters which gained The system as per preliminary analysis would contain two popularity as mini-helicopters. A quadcopter, also known as a physically separate components, but linked with a common quadrotor helicopter, is lifted by means of four rotors. In operation, algorithm which includes controlling of the drone’s positions along the quadcopters generally use two pairs of identical fixed pitched with the movement of the arm. propellers; two clockwise (CW) and two counterclockwise (CCW). They use independent variation of the speed of each rotor to achieve Keywords control. -

Development of a Series Elastic Actuator and a Distributed Computational Platform for Robotics
Development of a Series Elastic Actuator and a Distributed Computational Platform for Robotics Gonçalo Patrício Luís Thesis to obtain the Master of Science Degree in Mechanical Engineering Supervisor: Prof. Jorge Manuel Mateus Martins Examination Committee Chairperson: Prof. João Rogério Caldas Pinto Supervisor: Prof. Jorge Manuel Mateus Martins Member of the Committee: Prof. Carlos Baptista Cardeira November 2015 i ii To my Parents iii iv Acknowledgments I would like to thank Professor Jorge Martins for believing in my ideas on building a new computational platform from scratch in detriment of using the old platform. The first task he gave me was to play arround with the old platform until I felt confortable with it, not all teachers believe in loosing time on learning things that are supposed to work and should only be used instead of studied. In the end the freedom he gave me turned into finding gross mistakes in the old platform and ultimately building a new, more capable one. I would like to thank Professor Carlos Cardeira for clearing some questions I had about electronics regarding the circuit board for voltage conversion. I would also like to thank Professor Paulo Oliveira and Professor Alexandra Moutinho for showing me the power and beauty of control systems engineering in the lecture I had with them on that topic. Their practical and clear explanations ultimately made me choose Systems as my Masters area, a choice I couldn’t be happier about. I am also deeply grateful to all the other teachers on the systems department and Eng. Camilo for creating and maintaining a friendly environment during classes and at the laboratory. -

Then and Now: Servos
NOW Then and SERVOS by Tom Carroll ervos? Just what is a servo (or a servo hack one to see what I could do with it. beginner’s kits from Parallax and others Smotor or servo mechanism, as they I believe that first thing I made was use similar servos in small robots. are sometimes called)? Is that a year’s a linear actuator. Pulling the 4.7K pot Tabletop robots can make use of collection of this magazine? Most of us out, cutting off the stops from the the little motor/gearbox to drive a who have built robots have used one or output gear, I attached a 25 turn lead set of wheels and the associated more of these in our creations, but not all screw and a 25 turn 5K trim pot (in the electronics to receive the pulse trains robots use servos. Most of the larger vari- place of the other one) to the output from a microcontroller and convert eties of robots don’t use servos though shaft and had an amazingly powerful them to drive signals. This is a cheap they might employ shaft encoders to push-pull actuator. Other experi- and effective way to get a robot design provide some sort of positional feedback menters in our robotics group were from a few sketches to a working to a controlling microcontroller or attaching them to arm and leg joints, machine in a few hours. computer. Most combat robots (like the and driving the servos with 555/556 As robot experimenters, we think ones that seem out of control) don’t use timer circuits or 6502 microprocessors, of those little black boxes that any form of them, so why do so many and a few started to use them as drive were originally developed for model experimenters utilize them? motors for small robot’s wheels. -

Surveillance Robot Controlled Using an Android App Project Report Submitted in Partial Fulfillment of the Requirements for the Degree Of
Surveillance Robot controlled using an Android app Project Report Submitted in partial fulfillment of the requirements for the degree of Bachelor of Engineering by Shaikh Shoeb Maroof Nasima (Roll No.12CO92) Ansari Asgar Ali Shamshul Haque Shakina (Roll No.12CO106) Khan Sufiyan Liyaqat Ali Kalimunnisa (Roll No.12CO81) Mir Ibrahim Salim Farzana (Roll No.12CO82) Supervisor Prof. Kalpana R. Bodke Co-Supervisor Prof. Amer Syed Department of Computer Engineering, School of Engineering and Technology Anjuman-I-Islam’s Kalsekar Technical Campus Plot No. 2 3, Sector -16, Near Thana Naka, Khanda Gaon, New Panvel, Navi Mumbai. 410206 Academic Year : 2014-2015 CERTIFICATE Department of Computer Engineering, School of Engineering and Technology, Anjuman-I-Islam’s Kalsekar Technical Campus Khanda Gaon,New Panvel, Navi Mumbai. 410206 This is to certify that the project entitled “Surveillance Robot controlled using an Android app” is a bonafide work of Shaikh Shoeb Maroof Nasima (12CO92), Ansari Asgar Ali Shamshul Haque Shakina (12CO106), Khan Sufiyan Liyaqat Ali Kalimunnisa (12CO81), Mir Ibrahim Salim Farzana (12CO82) submitted to the University of Mumbai in partial ful- fillment of the requirement for the award of the degree of “Bachelor of Engineering” in De- partment of Computer Engineering. Prof. Kalpana R. Bodke Prof. Amer Syed Supervisor/Guide Co-Supervisor/Guide Prof. Tabrez Khan Dr. Abdul Razak Honnutagi Head of Department Director Project Approval for Bachelor of Engineering This project I entitled Surveillance robot controlled using an android application by Shaikh Shoeb Maroof Nasima, Ansari Asgar Ali Shamshul Haque Shakina, Mir Ibrahim Salim Farzana,Khan Sufiyan Liyaqat Ali Kalimunnisa is approved for the degree of Bachelor of Engineering in Department of Computer Engineering. -

2014-2015 SISD Literary Anthology
2014-2015 SISD Literary Anthology SADDLE UP Socorro ISD Board of Trustees Paul Guerra - President Angelica Rodriguez - Vice President Antonio ‘Tony’ Ayub - Secretary Gary Gandara - Trustee Hector F. Gonzalez - Trustee Michael A. Najera - Trustee Cynthia A. Najera - Trustee Superintendent of Schools José Espinoza, Ed.D. Socorro ISD District Service Center 12440 Rojas Dr. • El Paso, TX 79928 Phn 915.937.0000 • www.sisd.net Socorro Independent School District The Socorro Independent School District does not discriminate on the basis of race, color, national origin, sex, disability, or age in its programs, activities or employment. Leading • Inspiring • Innovating Socorro Independent School District Literary Anthology 2014-2015 An Award Winning Collection of: Poetry Real/Imaginative/Engaging Stories Persuasive Essays Argumentative Essays Informative Essays Analytical Essays Letters Scripts Personal Narrative Special thanks to: Yvonne Aragon and Sylvia Gómez Soriano District Coordinators Socorro Independent School District 2014-15 Literary Anthology - Writing Round-Up 1 Board of Trustees The Socorro ISD Board of Trustees consists of seven elected citizens who work with community leaders, families, and educators to develop sound educational policies to support student achievement and ensure the solvency of the District. Together, they are a strong and cohesive team that helps the District continuously set and achieve new levels of excellence. Five of the trustees represent single-member districts and two are elected at-large. Mission Statement -

Humanoid Robot Soccer Locomotion and Kick Dynamics
Humanoid Robot Soccer Locomotion and Kick Dynamics Open Loop Walking, Kicking and Morphing into Special Motions on the Nao Robot Alexander Buckley B.Eng (Computer) (Hons.) In Partial Fulfillment of the Requirements for the Degree Master of Science Presented to the Faculty of Science and Engineering of the National University of Ireland Maynooth in June 2013 Department Head: Prof. Douglas Leith Supervisor: Prof. Richard Middleton Acknowledgements This work would not have been possible without the guidance, help and most of all the patience of my supervisor, Rick Middleton. I would like to thank the members of the RoboEireann team, and those I have worked with at the Hanilton institute. Their contribution to my work has been invaluable, and they have helped make my time here an enjoyable experience. Finally, RoboCup itself has been an exceptional experience. It has provided an environment that is both challenging and rewarding, allowing me the chance to fulfill one of my earliest goals in life, to work intimately with robots. Abstract Striker speed and accuracy in the RoboCup (SPL) international robot soccer league is becoming increasingly important as the level of play rises. Competition around the ball is now decided in a matter of seconds. Therefore, eliminating any wasted actions or motions is crucial when attempting to kick the ball. It is common to see a discontinuity between walking and kicking where a robot will return to an initial pose in preparation for the kick action. In this thesis we explore the removal of this behaviour by developing a transition gait that morphs the walk directly into the kick back swing pose. -

Universidade Federal Do Amazonas Faculdade De Informação E Comunicação Programa De Pós-Graduação Em Ciências Da Comunicação
UNIVERSIDADE FEDERAL DO AMAZONAS FACULDADE DE INFORMAÇÃO E COMUNICAÇÃO PROGRAMA DE PÓS-GRADUAÇÃO EM CIÊNCIAS DA COMUNICAÇÃO MAYANE BATISTA LIMA PERSPECTIVISMO MAQUÍNICO Sobre um ponto de vista heurístico concernente aos ecossistemas comunicacionais MANAUS 2020 MAYANE BATISTA LIMA PERSPECTIVISMO MAQUÍNICO Sobre um ponto de vista heurístico concernente aos ecossistemas comunicacionais Dissertação apresentada como requisito para título de Mestre no Programa de Pós- Graduação em Ciências da Comunicação da Universidade Federal do Amazonas. Linha de Pesquisa 1: Redes e processos comunicacionais. Orientador: Prof. Dr.Renan Albuquerque Coorientadora: Profa. Dra. Denize Piccolotto Carvalho MANAUS 2020 Ficha Catalográfica Ficha catalográfica elaborada automaticamente de acordo com os dados fornecidos pelo(a) autor(a). Lima, Mayane Batista L732p Perspectivismo Maquínico : Sobre um ponto de vista heurístico concernente aos ecossistemas comunicacionais / Mayane Batista Lima . 2020 74 f.: il. color; 31 cm. Orientador: Renan Albuquerque Coorientadora: Denize Piccolotto Carvalho Dissertação (Mestrado em Ciência da Comunicação) – Universidade Federal do Amazonas. 1. perspectivismo maquínico. 2. ecossistemas comunicacionais. 3. inteligência artificial. 4. robôs. I. Albuquerque, Renan. II. Universidade Federal do Amazonas III. Título PERSPECTIVISMO MAQUÍNICO Sobre um ponto de vista heurístico concernente aos ecossistemas comunicacionais Dissertação apresentada como requisito para título de Mestre no Programa de Pós- Graduação em Ciências da Comunicação da Universidade Federal do Amazonas. Linha de Pesquisa 1: Redes e processos comunicacionais. BANCA EXAMINADORA Prof. Dr. Renan Albuquerque – Presidente Universidade Federal do Amazonas Prof. Dr. João Luiz de Souza – Membro Universidade Federal do Amazonas Profa. Dra. Edilene Mafra – Membro Universidade Federal do Amazonas Profa. Dra. Maria Emília de Oliveira Pereira Abbud – Suplente Universidade Federal do Amazonas Prof. Dr.