Master Thesis Robot's Appearance
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Humanoid Robots – from Fiction to Reality?
KI-Zeitschrift, 4/08, pp. 5-9, December 2008 Humanoid Robots { From Fiction to Reality? Sven Behnke Humanoid robots have been fascinating people ever since the invention of robots. They are the embodiment of artificial intelligence. While in science fiction, human-like robots act autonomously in complex human-populated environments, in reality, the capabilities of humanoid robots are quite limited. This article reviews the history of humanoid robots, discusses the state-of-the-art and speculates about future developments in the field. 1 Introduction 1495 Leonardo da Vinci designed and possibly built a mechan- ical device that looked like an armored knight. It was designed Humanoid robots, robots with an anthropomorphic body plan to sit up, wave its arms, and move its head via a flexible neck and human-like senses, are enjoying increasing popularity as re- while opening and closing its jaw. By the eighteenth century, search tool. More and more groups worldwide work on issues like elaborate mechanical dolls were able to write short phrases, play bipedal locomotion, dexterous manipulation, audio-visual per- musical instruments, and perform other simple, life-like acts. ception, human-robot interaction, adaptive control, and learn- In 1921 the word robot was coined by Karel Capek in its ing, targeted for the application in humanoid robots. theatre play: R.U.R. (Rossum's Universal Robots). The me- These efforts are motivated by the vision to create a new chanical servant in the play had a humanoid appearance. The kind of tool: robots that work in close cooperation with hu- first humanoid robot to appear in the movies was Maria in the mans in the same environment that we designed to suit our film Metropolis (Fritz Lang, 1926). -

Lower Body Design of the `Icub' a Human-Baby Like Crawling Robot
CORE Metadata, citation and similar papers at core.ac.uk Provided by University of Salford Institutional Repository Lower Body Design of the ‘iCub’ a Human-baby like Crawling Robot N.G.Tsagarakis M. Sinclair F. Becchi Center of Robotics and Automation Center of Robotics and Automation TELEROBOT University of Salford University of Salford Advanced Robotics Salford , M5 4WT, UK Salford , M5 4WT, UK 16128 Genova, Italy [email protected] [email protected] [email protected] G. Metta G. Sandini D.G.Caldwell LIRA-Lab, DIST LIRA-Lab, DIST Center of Robotics and Automation University of Genova University of Genova University of Salford 16145 Genova, Italy 16145 Genova, Italy Salford , M5 4WT, UK [email protected] [email protected] [email protected] Abstract – The development of robotic cognition and a human like robots has led to the development of H6 and H7 greater understanding of human cognition form two of the [2]. Within the commercial arena there were also robots of current greatest challenges of science. Within the considerable distinction including those developed by RobotCub project the goal is the development of an HONDA. Their second prototype, P2, was introduced in 1996 embodied robotic child (iCub) with the physical and and provided an important step forward in the development of ultimately cognitive abilities of a 2 ½ year old human full body humanoid systems [3]. P3 introduced in 1997 was a baby. The ultimate goal of this project is to provide the scaled down version of P2 [4]. ASIMO (Advanced Step in cognition research community with an open human like Innovative Mobility) a child sized robot appeared in 2000. -

Robot Mediated Communication
UNIVERSITY OF THE WEST OF ENGLAND ROBOT MEDIATED COMMUNICATION: ENHANCING TELE-PRESENCE USING AN AVATAR HAMZAH ZIYAAD HOSSEN MAMODE 10/08/2015 A thesis submitted in partial fulfilment of the requirements of the University of the West of England, Bristol for the degree of Doctor of Philosophy Faculty of Environment and Technology University of the West of England, Bristol August 2015 Robot Mediated Communication: Enhancing Tele-presence using an Avatar “If words of command are not clear and distinct, if orders are not thoroughly understood, then the general is to blame.” – Sun Tzu (c. 6th century BCE) P-2 Robot Mediated Communication: Enhancing Tele-presence using an Avatar Declaration I declare that the work in this dissertation was carried out in accordance with the requirements of the University's Regulations and Code of Practice for Research Degree Programmes and that it has not been submitted for any other academic award. Except where indicated by specific reference in the text, the work is the candidate's own work. Work done in collaboration with, or with the assistance of, others, is indicated as such. Any views expressed in the dissertation are those of the author. Signed: Date: P-3 Robot Mediated Communication: Enhancing Tele-presence using an Avatar Abstract In the past few years there has been a lot of development in the field of tele-presence. These developments have caused tele-presence technologies to become easily accessible and also for the experience to be enhanced. Since tele-presence is not only used for tele-presence assisted group meetings but also in some forms of Computer Supported Cooperative Work (CSCW), these activities have also been facilitated. -

Lower Body Design of the 'Icub' a Human-Baby Like Crawling Robot
Lower Body Design of the ‘iCub’ a Human-baby like Crawling Robot N.G.Tsagarakis M. Sinclair F. Becchi Center of Robotics and Automation Center of Robotics and Automation TELEROBOT University of Salford University of Salford Advanced Robotics Salford , M5 4WT, UK Salford , M5 4WT, UK 16128 Genova, Italy [email protected] G Metta G. Sandini D.G.Caldwell LIRA-Lab, DIST LIRA-Lab, DIST Center of Robotics and Automation University of Genova University of Genova University of Salford 16145 Genova, Italy 16145 Genova, Italy Salford , M5 4WT, UK [email protected] [email protected] [email protected] Abstract – The development of robotic cognition and a which weights 131.4kg forms a complete human like figure greater understanding of human cognition form two of the [1]. At the University of Tokyo which also has a long history current greatest challenges of science. Within the RobotCub of humanoid development, research efforts on human like project the goal is the development of an embodied robotic child robots has led in recent times to the development of H6 and (iCub)with the physical and ultimately cognitive abilities of a 2 H7. H6 has a total of 35 degrees of freedom (D.O.F) and ½ year old human baby. The ultimate goal of this project is weighs 55Kg [2]. Within the commercial arena there were to provide the cognition research community with an open also robots of considerable distinction including those human like platform for understanding of cognitive developed by HONDA. Their second prototype, P2, was systems through the study of cognitive development. -

Design and Realization of a Humanoid Robot for Fast and Autonomous Bipedal Locomotion
TECHNISCHE UNIVERSITÄT MÜNCHEN Lehrstuhl für Angewandte Mechanik Design and Realization of a Humanoid Robot for Fast and Autonomous Bipedal Locomotion Entwurf und Realisierung eines Humanoiden Roboters für Schnelles und Autonomes Laufen Dipl.-Ing. Univ. Sebastian Lohmeier Vollständiger Abdruck der von der Fakultät für Maschinenwesen der Technischen Universität München zur Erlangung des akademischen Grades eines Doktor-Ingenieurs (Dr.-Ing.) genehmigten Dissertation. Vorsitzender: Univ.-Prof. Dr.-Ing. Udo Lindemann Prüfer der Dissertation: 1. Univ.-Prof. Dr.-Ing. habil. Heinz Ulbrich 2. Univ.-Prof. Dr.-Ing. Horst Baier Die Dissertation wurde am 2. Juni 2010 bei der Technischen Universität München eingereicht und durch die Fakultät für Maschinenwesen am 21. Oktober 2010 angenommen. Colophon The original source for this thesis was edited in GNU Emacs and aucTEX, typeset using pdfLATEX in an automated process using GNU make, and output as PDF. The document was compiled with the LATEX 2" class AMdiss (based on the KOMA-Script class scrreprt). AMdiss is part of the AMclasses bundle that was developed by the author for writing term papers, Diploma theses and dissertations at the Institute of Applied Mechanics, Technische Universität München. Photographs and CAD screenshots were processed and enhanced with THE GIMP. Most vector graphics were drawn with CorelDraw X3, exported as Encapsulated PostScript, and edited with psfrag to obtain high-quality labeling. Some smaller and text-heavy graphics (flowcharts, etc.), as well as diagrams were created using PSTricks. The plot raw data were preprocessed with Matlab. In order to use the PostScript- based LATEX packages with pdfLATEX, a toolchain based on pst-pdf and Ghostscript was used. -

History of Robotics: Timeline
History of Robotics: Timeline This history of robotics is intertwined with the histories of technology, science and the basic principle of progress. Technology used in computing, electricity, even pneumatics and hydraulics can all be considered a part of the history of robotics. The timeline presented is therefore far from complete. Robotics currently represents one of mankind’s greatest accomplishments and is the single greatest attempt of mankind to produce an artificial, sentient being. It is only in recent years that manufacturers are making robotics increasingly available and attainable to the general public. The focus of this timeline is to provide the reader with a general overview of robotics (with a focus more on mobile robots) and to give an appreciation for the inventors and innovators in this field who have helped robotics to become what it is today. RobotShop Distribution Inc., 2008 www.robotshop.ca www.robotshop.us Greek Times Some historians affirm that Talos, a giant creature written about in ancient greek literature, was a creature (either a man or a bull) made of bronze, given by Zeus to Europa. [6] According to one version of the myths he was created in Sardinia by Hephaestus on Zeus' command, who gave him to the Cretan king Minos. In another version Talos came to Crete with Zeus to watch over his love Europa, and Minos received him as a gift from her. There are suppositions that his name Talos in the old Cretan language meant the "Sun" and that Zeus was known in Crete by the similar name of Zeus Tallaios. -

Ph. D. Thesis Stable Locomotion of Humanoid Robots Based
Ph. D. Thesis Stable locomotion of humanoid robots based on mass concentrated model Author: Mario Ricardo Arbul´uSaavedra Director: Carlos Balaguer Bernaldo de Quiros, Ph. D. Department of System and Automation Engineering Legan´es, October 2008 i Ph. D. Thesis Stable locomotion of humanoid robots based on mass concentrated model Author: Mario Ricardo Arbul´uSaavedra Director: Carlos Balaguer Bernaldo de Quiros, Ph. D. Signature of the board: Signature President Vocal Vocal Vocal Secretary Rating: Legan´es, de de Contents 1 Introduction 1 1.1 HistoryofRobots........................... 2 1.1.1 Industrialrobotsstory. 2 1.1.2 Servicerobots......................... 4 1.1.3 Science fiction and robots currently . 10 1.2 Walkingrobots ............................ 10 1.2.1 Outline ............................ 10 1.2.2 Themes of legged robots . 13 1.2.3 Alternative mechanisms of locomotion: Wheeled robots, tracked robots, active cords . 15 1.3 Why study legged machines? . 20 1.4 What control mechanisms do humans and animals use? . 25 1.5 What are problems of biped control? . 27 1.6 Features and applications of humanoid robots with biped loco- motion................................. 29 1.7 Objectives............................... 30 1.8 Thesiscontents ............................ 33 2 Humanoid robots 35 2.1 Human evolution to biped locomotion, intelligence and bipedalism 36 2.2 Types of researches on humanoid robots . 37 2.3 Main humanoid robot research projects . 38 2.3.1 The Humanoid Robot at Waseda University . 38 2.3.2 Hondarobots......................... 47 2.3.3 TheHRPproject....................... 51 2.4 Other humanoids . 54 2.4.1 The Johnnie project . 54 2.4.2 The Robonaut project . 55 2.4.3 The COG project . -

DAC-H3: a Proactive Robot Cognitive Architecture to Acquire and Express
Preprint version; final version available at http://ieeexplore.ieee.org/ IEEE Transactions on Cognitive and Developmental Systems (Accepted) DOI: 10.1109/TCDS.2017.2754143 1 DAC-h3: A Proactive Robot Cognitive Architecture to Acquire and Express Knowledge About the World and the Self Clément Moulin-Frier*, Tobias Fischer*, Maxime Petit, Grégoire Pointeau, Jordi-Ysard Puigbo, Ugo Pattacini, Sock Ching Low, Daniel Camilleri, Phuong Nguyen, Matej Hoffmann, Hyung Jin Chang, Martina Zambelli, Anne-Laure Mealier, Andreas Damianou, Giorgio Metta, Tony J. Prescott, Yiannis Demiris, Peter Ford Dominey, and Paul F. M. J. Verschure Abstract—This paper introduces a cognitive architecture for I. INTRODUCTION a humanoid robot to engage in a proactive, mixed-initiative exploration and manipulation of its environment, where the HE so-called Symbol Grounding Problem (SGP, [1], [2], initiative can originate from both the human and the robot. The T [3]) refers to the way in which a cognitive agent forms an framework, based on a biologically-grounded theory of the brain internal and unified representation of an external word referent and mind, integrates a reactive interaction engine, a number of from the continuous flow of low-level sensorimotor data state-of-the art perceptual and motor learning algorithms, as well as planning abilities and an autobiographical memory. The generated by its interaction with the environment. In this paper, architecture as a whole drives the robot behavior to solve the we focus on solving the SGP in the context of human-robot symbol grounding problem, acquire language capabilities, execute interaction (HRI), where a humanoid iCub robot [4] acquires goal-oriented behavior, and express a verbal narrative of its own and expresses knowledge about the world by interacting with experience in the world. -

Honda Insight Wikipedia in Its Third Generation, It Became a Four-Door Sedan €”Present
Honda insight wikipedia In its third generation, it became a four-door sedan —present. It was Honda's first model with Integrated Motor Assist system and the most fuel efficient gasoline-powered car available in the U. The Insight was launched April in the UK as the lowest priced hybrid on the market and became the best selling hybrid for the month. The Insight ranked as the top-selling vehicle in Japan for the month of April , a first for a hybrid model. In the following month, December , Insight became the first hybrid available in North America, followed seven months later by the Toyota Prius. The Insight featured optimized aerodynamics and a lightweight aluminum structure to maximize fuel efficiency and minimize emissions. As of , the first generation Insight still ranks as the most fuel-efficient United States Environmental Protection Agency EPA certified gasoline-fueled vehicle, with a highway rating of 61 miles per US gallon 3. The first-generation Insight was manufactured as a two-seater, launching in a single trim level with a manual transmission and optional air conditioning. In the second year of production two trim levels were available: manual transmission with air conditioning , and continuously variable transmission CVT with air conditioning. The only major change during its life span was the introduction of a trunk-mounted, front-controlled, multiple-disc CD changer. In addition to its hybrid drive system, the Insight was small, light and streamlined — with a drag-coefficient of 0. At the time of production, it was the most aerodynamic production car to be built. -

Universidade Federal Do Amazonas Faculdade De Informação E Comunicação Programa De Pós-Graduação Em Ciências Da Comunicação
UNIVERSIDADE FEDERAL DO AMAZONAS FACULDADE DE INFORMAÇÃO E COMUNICAÇÃO PROGRAMA DE PÓS-GRADUAÇÃO EM CIÊNCIAS DA COMUNICAÇÃO MAYANE BATISTA LIMA PERSPECTIVISMO MAQUÍNICO Sobre um ponto de vista heurístico concernente aos ecossistemas comunicacionais MANAUS 2020 MAYANE BATISTA LIMA PERSPECTIVISMO MAQUÍNICO Sobre um ponto de vista heurístico concernente aos ecossistemas comunicacionais Dissertação apresentada como requisito para título de Mestre no Programa de Pós- Graduação em Ciências da Comunicação da Universidade Federal do Amazonas. Linha de Pesquisa 1: Redes e processos comunicacionais. Orientador: Prof. Dr.Renan Albuquerque Coorientadora: Profa. Dra. Denize Piccolotto Carvalho MANAUS 2020 Ficha Catalográfica Ficha catalográfica elaborada automaticamente de acordo com os dados fornecidos pelo(a) autor(a). Lima, Mayane Batista L732p Perspectivismo Maquínico : Sobre um ponto de vista heurístico concernente aos ecossistemas comunicacionais / Mayane Batista Lima . 2020 74 f.: il. color; 31 cm. Orientador: Renan Albuquerque Coorientadora: Denize Piccolotto Carvalho Dissertação (Mestrado em Ciência da Comunicação) – Universidade Federal do Amazonas. 1. perspectivismo maquínico. 2. ecossistemas comunicacionais. 3. inteligência artificial. 4. robôs. I. Albuquerque, Renan. II. Universidade Federal do Amazonas III. Título PERSPECTIVISMO MAQUÍNICO Sobre um ponto de vista heurístico concernente aos ecossistemas comunicacionais Dissertação apresentada como requisito para título de Mestre no Programa de Pós- Graduação em Ciências da Comunicação da Universidade Federal do Amazonas. Linha de Pesquisa 1: Redes e processos comunicacionais. BANCA EXAMINADORA Prof. Dr. Renan Albuquerque – Presidente Universidade Federal do Amazonas Prof. Dr. João Luiz de Souza – Membro Universidade Federal do Amazonas Profa. Dra. Edilene Mafra – Membro Universidade Federal do Amazonas Profa. Dra. Maria Emília de Oliveira Pereira Abbud – Suplente Universidade Federal do Amazonas Prof. Dr. -

Jurnal Teknologi Elektro Jurnal Ilmiah Teknik Elektro Universitas Mercu Buana
Jurnal Teknologi Elektro Jurnal Ilmiah Teknik Elektro Universitas Mercu Buana http://publikasi.mercubuana.ac.id/index.php/jte Volume 5, Nomor 2, Januari 2014 ISSN: 2086-9479 Pemodelan Simulasi Kontrol Pada Sistem Pengolahan Air Limbah Dengan Menggunakan PLC 58 Badaruddin, Endang Saputra Penerapan Lego Mindstroms NXT Forklift Dan Conveyor Robot Untuk Mensortir Barang Menggunakan Sensor Warna 67 Yudhi Gunardi, Eko Saputro Perancangan Jaringan Transmisi Gelombang Mikro Pada Link Site Mranggen 2 Dengan Site Pucang Gading 76 Said Attamimi, Rachman Perancangan Simulasi Sistem Pemantauan Pintu Perlintasan Kereta Api Berbasis Arduino 87 Eko Ihsanto, Ferdian Ramadhan Rancang Bangun Humanoid Robotic Hand Berbasis Arduino Andi Adriansyah , Muhammad Hafizd Ibnu Hajar 95 Jurnal Mei Halaman ISSN Teknologi Volume Nomor 2014 58– 104 2086-9479 Elektro 5 2 JURNAL TEKNOLOGI ELEKTRO Program Studi Teknik Elektro Fakultas Teknik - Universitas Mercu Buana Volume 5 - Nomor 2 Mei 2014 ISSN: 2086-9479 Daftar Isi i Kata Pengantar ii Susunan Redaksi iii Pemodelan Simulasi Kontrol Pada Sistem Pengolahan Air Limbah 58 Dengan Menggunakan PLC Badaruddin, Endang Saputra Penerapan Lego Mindstroms NXT Forklift Dan Conveyor Robot 67 Untuk Mensortir Barang Menggunakan Sensor Warna Yudhi Gunardi, Eko Saputro Perancangan Jaringan Transmisi Gelombang Mikro 76 Pada Link Site Mranggen 2 Dengan Site Pucang Gading Said Attamimi, Rachman Perancangan Simulasi Sistem Pemantauan Pintu Perlintasan Kereta Api 87 Berbasis Arduino Eko Ihsanto, Ferdian Ramadhan Rancang Bangun Humanoid Robotic Hand Berbasis Arduino 95 Andi Adriansyah , Muhammad Hafizd Ibnu Hajar i KATA PENGANTAR REDAKSI Kami memanjatkan Puji dan Syukur kepada Allah SWT karena atas rahmat dan ridho-nya Jurnal Teknologi Elektro Universitas Mercu Buana, Volume: 5, Nomor: 2 Mei 2014 telah dapat diterbitkan dan sampai kehadapan para pembaca yang budiman. -
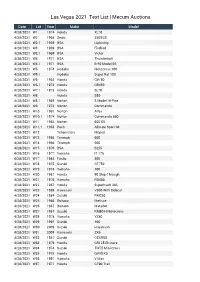
Las Vegas 2021 Text List | Mecum Auctions
Las Vegas 2021 Text List | Mecum Auctions Date Lot Year Make Model 4/28/2021 W1 1974 Honda XL70 4/28/2021 W2 1968 Sears 250SGS 4/28/2021 W2.1 1969 BSA Lightning 4/28/2021 W3 1969 BSA Firebird 4/28/2021 W3.1 1969 BSA Victor 4/28/2021 W4 1971 BSA Thunderbolt 4/28/2021 W4.1 1971 BSA B-50 Model SS 4/28/2021 W5 1974 Hodaka Motocross 100 4/28/2021 W5.1 Hodaka Super Rat 100 4/28/2021 W6 1964 Honda CB750 4/28/2021 W6.1 1973 Honda CB450 4/28/2021 W7.1 1973 Honda SL70 4/28/2021 W8 Honda S90 4/28/2021 W8.1 1969 Norton S Model Hi-Pipe 4/28/2021 W9 1973 Norton Commando 4/28/2021 W10 1967 Norton Atlas 4/28/2021 W10.1 1974 Norton Commando 850 4/28/2021 W11 1962 Norton 650 SS 4/28/2021 W11.1 1963 Puch Allstate Sport 60 4/28/2021 W12 Teliamotors Moped 4/28/2021 W13 1956 Triumph 650 4/28/2021 W14 1966 Triumph 500 4/28/2021 W15 1970 BSA B255 4/28/2021 W16 1977 Yamaha IT 175 4/28/2021 W17 1984 Fantic 300 4/28/2021 W18 1975 Suzuki GT750 4/28/2021 W19 1974 Yamaha 100 4/28/2021 W20 1967 Honda 90 Step-Through 4/28/2021 W21 1976 Yamaha RD400 4/28/2021 W22 1967 Honda Superhawk 305 4/28/2021 W23 1999 Kawasaki V800 With Sidecar 4/28/2021 W24 1984 Suzuki RM250 4/28/2021 W25 1966 Bultaco Metisse 4/28/2021 W26 1967 Bultaco Matador 4/28/2021 W27 1987 Suzuki RM80 H Motocross 4/28/2021 W28 1978 Yamaha YZ80 4/28/2021 W29 1994 Suzuki 400 4/28/2021 W30 2009 Suzuki Hayabusa 4/28/2021 W31 2009 Kawasaki ZX6 4/28/2021 W32 1987 Suzuki GSXR50 4/28/2021 W33 1979 Honda CR125 Elsinore 4/28/2021 W34 1974 Suzuki TM75 Mini-Cross 4/28/2021 W35 1975 Honda QA50 K3 4/28/2021 W36 1997 Yamaha