Ii LECTURES on SPACES of NONPOSITIVE CURVATURE
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Differential Geometry: Curvature and Holonomy Austin Christian
University of Texas at Tyler Scholar Works at UT Tyler Math Theses Math Spring 5-5-2015 Differential Geometry: Curvature and Holonomy Austin Christian Follow this and additional works at: https://scholarworks.uttyler.edu/math_grad Part of the Mathematics Commons Recommended Citation Christian, Austin, "Differential Geometry: Curvature and Holonomy" (2015). Math Theses. Paper 5. http://hdl.handle.net/10950/266 This Thesis is brought to you for free and open access by the Math at Scholar Works at UT Tyler. It has been accepted for inclusion in Math Theses by an authorized administrator of Scholar Works at UT Tyler. For more information, please contact [email protected]. DIFFERENTIAL GEOMETRY: CURVATURE AND HOLONOMY by AUSTIN CHRISTIAN A thesis submitted in partial fulfillment of the requirements for the degree of Master of Science Department of Mathematics David Milan, Ph.D., Committee Chair College of Arts and Sciences The University of Texas at Tyler May 2015 c Copyright by Austin Christian 2015 All rights reserved Acknowledgments There are a number of people that have contributed to this project, whether or not they were aware of their contribution. For taking me on as a student and learning differential geometry with me, I am deeply indebted to my advisor, David Milan. Without himself being a geometer, he has helped me to develop an invaluable intuition for the field, and the freedom he has afforded me to study things that I find interesting has given me ample room to grow. For introducing me to differential geometry in the first place, I owe a great deal of thanks to my undergraduate advisor, Robert Huff; our many fruitful conversations, mathematical and otherwise, con- tinue to affect my approach to mathematics. -

Numerical Methods for Optimization and Variational Problems with Manifold-Valued Data
Research Collection Doctoral Thesis Numerical Methods for Optimization and Variational Problems with Manifold-Valued Data Author(s): Sprecher, Markus Publication Date: 2016 Permanent Link: https://doi.org/10.3929/ethz-a-010686559 Rights / License: In Copyright - Non-Commercial Use Permitted This page was generated automatically upon download from the ETH Zurich Research Collection. For more information please consult the Terms of use. ETH Library Diss. ETH No. 23579 Numerical Methods for Optimization and Variational Problems with Manifold-Valued Data A dissertation submitted to ETH Zurich¨ for the degree of Doctor of Sciences presented by MARKUS SPRECHER MSc ETH Math, ETH Zurich¨ born August 30, 1986 citizen of Chur, GR accepted on the recommendation of Prof. Dr. Philipp Grohs, ETH Zurich,¨ examiner Prof. Dr. Oliver Sander, TU Dresden, co-examiner Prof. Dr. Johannes Wallner, TU Graz, co-examiner 2016 Acknowledgments I am thankful to everyone who has contributed to the success of this thesis in any way: Prof. Dr. Philipp Grohs for giving me the opportunity to do my PhD at ETH Zurich¨ and work on a very interesting and new topic. Thanks to the scientific freedom and trust I experienced by working with him, it has been a great time of acquiring new knowledge among different areas of mathematics. I admire his mathematical intuition and also his broad knowledge. Prof. Dr. Oliver Sander and Prof. Dr. Johannes Wallner for acting as co-examiners. Zeljko Kereta and Andreas B¨artschi for proof-reading my thesis. All the members of the Seminar for applied mathematics who make this institute not only a good place to work but also to live. -
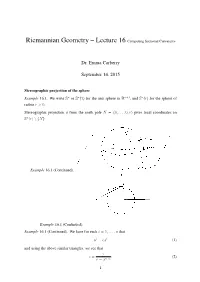
Riemannian Geometry – Lecture 16 Computing Sectional Curvatures
Riemannian Geometry – Lecture 16 Computing Sectional Curvatures Dr. Emma Carberry September 14, 2015 Stereographic projection of the sphere Example 16.1. We write Sn or Sn(1) for the unit sphere in Rn+1, and Sn(r) for the sphere of radius r > 0. Stereographic projection φ from the north pole N = (0;:::; 0; r) gives local coordinates on Sn(r) n fNg Example 16.1 (Continued). Example 16.1 (Continued). Example 16.1 (Continued). We have for each i = 1; : : : ; n that ui = cxi (1) and using the above similar triangles, we see that r c = : (2) r − xn+1 1 Hence stereographic projection φ : Sn n fNg ! Rn is given by rx1 rxn φ(x1; : : : ; xn; xn+1) = ;:::; r − xn+1 r − xn+1 The inverse φ−1 of stereographic projection is given by (exercise) 2r2ui xi = ; i = 1; : : : ; n juj2 + r2 2r3 xn+1 = r − : juj2 + r2 and so we see that stereographic projection is a diffeomorphism. Stereographic projection is conformal Definition 16.2. A local coordinate chart (U; φ) on Riemannian manifold (M; g) is conformal if for any p 2 U and X; Y 2 TpM, 2 gp(X; Y ) = F (p) hdφp(X); dφp(Y )i where F : U ! R is a nowhere vanishing smooth function and on the right-hand side we are using the usual Euclidean inner product. Exercise 16.3. Prove that this is equivalent to: 1. dφp preserving angles, where the angle between X and Y is defined (up to adding multi- ples of 2π) by g(X; Y ) cos θ = pg(X; X)pg(Y; Y ) and also to 2 2. -

SECTIONAL CURVATURE-TYPE CONDITIONS on METRIC SPACES 2 and Poincaré Conditions, and Even the Measure Contraction Property
SECTIONAL CURVATURE-TYPE CONDITIONS ON METRIC SPACES MARTIN KELL Abstract. In the first part Busemann concavity as non-negative curvature is introduced and a bi-Lipschitz splitting theorem is shown. Furthermore, if the Hausdorff measure of a Busemann concave space is non-trivial then the space is doubling and satisfies a Poincaré condition and the measure contraction property. Using a comparison geometry variant for general lower curvature bounds k ∈ R, a Bonnet-Myers theorem can be proven for spaces with lower curvature bound k > 0. In the second part the notion of uniform smoothness known from the theory of Banach spaces is applied to metric spaces. It is shown that Busemann functions are (quasi-)convex. This implies the existence of a weak soul. In the end properties are developed to further dissect the soul. In order to understand the influence of curvature on the geometry of a space it helps to develop a synthetic notion. Via comparison geometry sectional curvature bounds can be obtained by demanding that triangles are thinner or fatter than the corresponding comparison triangles. The two classes are called CAT (κ)- and resp. CBB(κ)-spaces. We refer to the book [BH99] and the forthcoming book [AKP] (see also [BGP92, Ots97]). Note that all those notions imply a Riemannian character of the metric space. In particular, the angle between two geodesics starting at a com- mon point is well-defined. Busemann investigated a weaker notion of non-positive curvature which also applies to normed spaces [Bus55, Section 36]. A similar idea was developed by Pedersen [Ped52] (see also [Bus55, (36.15)]). -

Chapter 13 Curvature in Riemannian Manifolds
Chapter 13 Curvature in Riemannian Manifolds 13.1 The Curvature Tensor If (M, , )isaRiemannianmanifoldand is a connection on M (that is, a connection on TM−), we− saw in Section 11.2 (Proposition 11.8)∇ that the curvature induced by is given by ∇ R(X, Y )= , ∇X ◦∇Y −∇Y ◦∇X −∇[X,Y ] for all X, Y X(M), with R(X, Y ) Γ( om(TM,TM)) = Hom (Γ(TM), Γ(TM)). ∈ ∈ H ∼ C∞(M) Since sections of the tangent bundle are vector fields (Γ(TM)=X(M)), R defines a map R: X(M) X(M) X(M) X(M), × × −→ and, as we observed just after stating Proposition 11.8, R(X, Y )Z is C∞(M)-linear in X, Y, Z and skew-symmetric in X and Y .ItfollowsthatR defines a (1, 3)-tensor, also denoted R, with R : T M T M T M T M. p p × p × p −→ p Experience shows that it is useful to consider the (0, 4)-tensor, also denoted R,givenby R (x, y, z, w)= R (x, y)z,w p p p as well as the expression R(x, y, y, x), which, for an orthonormal pair, of vectors (x, y), is known as the sectional curvature, K(x, y). This last expression brings up a dilemma regarding the choice for the sign of R. With our present choice, the sectional curvature, K(x, y), is given by K(x, y)=R(x, y, y, x)but many authors define K as K(x, y)=R(x, y, x, y). Since R(x, y)isskew-symmetricinx, y, the latter choice corresponds to using R(x, y)insteadofR(x, y), that is, to define R(X, Y ) by − R(X, Y )= + . -

3. Sectional Curvature of Lorentzian Manifolds. 1
3. SECTIONAL CURVATURE OF LORENTZIAN MANIFOLDS. 1. Sectional curvature, the Jacobi equation and \tidal stresses". The (3,1) Riemann curvature tensor has the same definition in the rie- mannian and Lorentzian cases: R(X; Y )Z = rX rY Z − rY rX Z − r[X;Y ]Z: If f(t; s) is a parametrized 2-surface in M (immersion) and W (t; s) is a vector field on M along f, we have the Ricci formula: D DW D DW − = R(@ f; @ f)W: @t @s @s @t t s For a variation f(t; s) = γs(t) of a geodesic γ(t) (with variational vector field J(t) = @sfjs=0 along γ(t)) this leads to the Jacobi equation for J: D2J + R(J; γ_ )_γ = 0: dt2 ? The Jacobi operator is the self-adjoint operator on (γ _ ) : Rp[v] = Rp(v; γ_ )_γ. When γ is a timelike geodesic (the worldline of a free-falling massive particle) the physical interpretation of J is the relative displacement (space- like) vector of a neighboring free-falling particle, while the second covariant 00 derivative J represents its relative acceleration. The Jacobi operator Rp gives the \tidal stresses" in terms of the position vector J. In the Lorentzian case, the sectional curvature is defined only for non- degenerate two-planes Π ⊂ TpM. Definition. Let Π = spanfX; Y g be a non-degenerate two-dimensional subspace of TpM. The sectional curvature σXY = σΠ is the real number σ defined by: hR(X; Y )Y; Xi = σhX ^ Y; X ^ Y i: Remark: by a result of J. -
Differential Geometry of Diffeomorphism Groups
CHAPTER IV DIFFERENTIAL GEOMETRY OF DIFFEOMORPHISM GROUPS In EN Lorenz stated that a twoweek forecast would b e the theoretical b ound for predicting the future state of the atmosphere using largescale numerical mo dels Lor Mo dern meteorology has currently reached a go o d correlation of the observed versus predicted for roughly seven days in the northern hemisphere whereas this p erio d is shortened by half in the southern hemisphere and by two thirds in the tropics for the same level of correlation Kri These dierences are due to a very simple factor the available data density The mathematical reason for the dierences and for the overall longterm unre liability of weather forecasts is the exp onential scattering of ideal uid or atmo spheric ows with close initial conditions which in turn is related to the negative curvatures of the corresp onding groups of dieomorphisms as Riemannian mani folds We will see that the conguration space of an ideal incompressible uid is highly nonat and has very p eculiar interior and exterior dierential geom etry Interior or intrinsic characteristics of a Riemannian manifold are those p ersisting under any isometry of the manifold For instance one can b end ie map isometrically a sheet of pap er into a cone or a cylinder but never without stretching or cutting into a piece of a sphere The invariant that distinguishes Riemannian metrics is called Riemannian curvature The Riemannian curvature of a plane is zero and the curvature of a sphere of radius R is equal to R If one Riemannian manifold can b e -

Curvature of Riemannian Manifolds
Curvature of Riemannian Manifolds Seminar Riemannian Geometry Summer Term 2015 Prof. Dr. Anna Wienhard and Dr. Gye-Seon Lee Soeren Nolting July 16, 2015 1 Motivation Figure 1: A vector parallel transported along a closed curve on a curved manifold.[1] The aim of this talk is to define the curvature of Riemannian Manifolds and meeting some important simplifications as the sectional, Ricci and scalar curvature. We have already noticed, that a vector transported parallel along a closed curve on a Riemannian Manifold M may change its orientation. Thus, we can determine whether a Riemannian Manifold is curved or not by transporting a vector around a loop and measuring the difference of the orientation at start and the endo of the transport. As an example take Figure 1, which depicts a parallel transport of a vector on a two-sphere. Note that in a non-curved space the orientation of the vector would be preserved along the transport. 1 2 Curvature In the following we will use the Einstein sum convention and make use of the notation: X(M) space of smooth vector fields on M D(M) space of smooth functions on M 2.1 Defining Curvature and finding important properties This rather geometrical approach motivates the following definition: Definition 2.1 (Curvature). The curvature of a Riemannian Manifold is a correspondence that to each pair of vector fields X; Y 2 X (M) associates the map R(X; Y ): X(M) ! X(M) defined by R(X; Y )Z = rX rY Z − rY rX Z + r[X;Y ]Z (1) r is the Riemannian connection of M. -

Lecture 8: the Sectional and Ricci Curvatures
LECTURE 8: THE SECTIONAL AND RICCI CURVATURES 1. The Sectional Curvature We start with some simple linear algebra. As usual we denote by ⊗2(^2V ∗) the set of 4-tensors that is anti-symmetric with respect to the first two entries and with respect to the last two entries. Lemma 1.1. Suppose T 2 ⊗2(^2V ∗), X; Y 2 V . Let X0 = aX +bY; Y 0 = cX +dY , then T (X0;Y 0;X0;Y 0) = (ad − bc)2T (X; Y; X; Y ): Proof. This follows from a very simple computation: T (X0;Y 0;X0;Y 0) = T (aX + bY; cX + dY; aX + bY; cX + dY ) = (ad − bc)T (X; Y; aX + bY; cX + dY ) = (ad − bc)2T (X; Y; X; Y ): 1 Now suppose (M; g) is a Riemannian manifold. Recall that 2 g ^ g is a curvature- like tensor, such that 1 g ^ g(X ;Y ;X ;Y ) = hX ;X ihY ;Y i − hX ;Y i2: 2 p p p p p p p p p p 1 Applying the previous lemma to Rm and 2 g ^ g, we immediately get Proposition 1.2. The quantity Rm(Xp;Yp;Xp;Yp) K(Xp;Yp) := 2 hXp;XpihYp;Ypi − hXp;Ypi depends only on the two dimensional plane Πp = span(Xp;Yp) ⊂ TpM, i.e. it is independent of the choices of basis fXp;Ypg of Πp. Definition 1.3. We will call K(Πp) = K(Xp;Yp) the sectional curvature of (M; g) at p with respect to the plane Πp. Remark. The sectional curvature K is NOT a function on M (for dim M > 2), but a function on the Grassmann bundle Gm;2(M) of M. -

Non-Expanding Maps and Busemann Functions
Ergod. Th. & Dynam. Sys. (2001), 21, 1447–1457 Printed in the United Kingdom c 2001 Cambridge University Press ! Non-expanding maps and Busemann functions ANDERS KARLSSON Department of Mathematics, ETH-Zentrum, CH-8092 Zurich,¨ Switzerland (e-mail: [email protected]) (Received 11 November 1999 and accepted in revised form 20 October 2000) Abstract. We give stronger versions and alternative simple proofs of some results of Beardon, [Be1] and [Be2]. These results concern contractions of locally compact metric spaces and generalize the theorems of Wolff and Denjoy about the iteration of a holomorphic map of the unit disk. In the case of unbounded orbits, there are two types of statements which can sometimes be proven; first, about invariant horoballs, and second, about the convergence of the iterates to a point on the boundary. A few further remarks of similar type are made concerning certain random products of semicontractions and also concerning semicontractions of Gromov hyperbolic spaces. 1. Introduction Let (Y, d) be a metric space. A contraction is a map φ Y Y , such that : → d(φ(x), φ(y)) < d(x, y), for any distinct x, y Y .Asemicontraction (or non-expanding/non-expansive map) is a ∈ map φ Y Y such that : → d(φ(x), φ(y)) d(x, y) ≤ for any x, y Y . In particular, any isometry is a semicontraction. ∈ In this paper we are interested in (the iteration of) semicontractions of locally compact, complete metric spaces. Recall that the Schwarz–Pick lemma asserts that any holomorphic map f D D, : → where D is the open unit disk in the complex plane, is a semicontraction with respect to the hyperbolic metric on D. -

Closed Geodesics on Orbifolds
CLOSED GEODESICS ON ORBIFOLDS CLOSED GEODESICS ON COMPACT DEVELOPABLE ORBIFOLDS By George C. Dragomir, M.Sc., B.Sc. A Thesis Submitted to the School of Graduate Studies in Partial Fulfilment of the Requirements for the Degree of DOCTOR OF PHILOSOPHY c Copyright by George C. Dragomir, 2011 DEGREE: DOCTOR OF PHILOSOPHY, 2011 UNIVERSITY: McMaster University, Hamilton, Ontario DEPARTMENT: Mathematics and Statistics TITLE: Closed geodesics on compact developable orbifolds AUTHOR: George C. Dragomir, B.Sc.(`Al. I. Cuza' University, Iasi, Romania), M.Sc. (McMaster University) SUPERVISOR(S): Prof. Hans U. Boden PAGES: xiv, 153 ii MCMASTER UNIVERSITY DEPARTMENT OF MATHEMATICS AND STATISTICS The undersigned hereby certify that they have read and recommend to the Faculty of Graduate Studies for acceptance of a thesis entitled \Closed geodesics on compact developable orbifolds" by George C. Dragomir in partial fulfillment of the requirements for the degree of Doctor of Philosophy. Dated: June 2011 External Examiner: Research Supervisor: Prof. Hans U. Boden Examing Committee: Prof. Ian Hambleton Prof. Andrew J. Nicas Prof. Maung Min-Oo iii To Miruna v Abstract Existence of closed geodesics on compact manifolds was first proved by Lyusternik and Fet in [44] using Morse theory, and the corre- sponding problem for orbifolds was studied by Guruprasad and Haefliger in [33], who proved existence of a closed geodesic of positive length in numerous cases. In this thesis, we develop an alternative approach to the problem of existence of closed geodesics on compact orbifolds by study- ing the geometry of group actions. We give an independent and elementary proof that recovers and extends the results in [33] for developable orbifolds. -

Differential Geometry Lecture 18: Curvature
Differential geometry Lecture 18: Curvature David Lindemann University of Hamburg Department of Mathematics Analysis and Differential Geometry & RTG 1670 14. July 2020 David Lindemann DG lecture 18 14. July 2020 1 / 31 1 Riemann curvature tensor 2 Sectional curvature 3 Ricci curvature 4 Scalar curvature David Lindemann DG lecture 18 14. July 2020 2 / 31 Recap of lecture 17: defined geodesics in pseudo-Riemannian manifolds as curves with parallel velocity viewed geodesics as projections of integral curves of a vector field G 2 X(TM) with local flow called geodesic flow obtained uniqueness and existence properties of geodesics constructed the exponential map exp : V ! M, V neighbourhood of the zero-section in TM ! M showed that geodesics with compact domain are precisely the critical points of the energy functional used the exponential map to construct Riemannian normal coordinates, studied local forms of the metric and the Christoffel symbols in such coordinates discussed the Hopf-Rinow Theorem erratum: codomain of (x; v) as local integral curve of G is d'(TU), not TM David Lindemann DG lecture 18 14. July 2020 3 / 31 Riemann curvature tensor Intuitively, a meaningful definition of the term \curvature" for 3 a smooth surface in R , written locally as a graph of a smooth 2 function f : U ⊂ R ! R, should involve the second partial derivatives of f at each point. How can we find a coordinate- 3 free definition of curvature not just for surfaces in R , which are automatically Riemannian manifolds by restricting h·; ·i, but for all pseudo-Riemannian manifolds? Definition Let (M; g) be a pseudo-Riemannian manifold with Levi-Civita connection r.