Chapter 13 Curvature in Riemannian Manifolds
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

The Simplicial Ricci Tensor 2
The Simplicial Ricci Tensor Paul M. Alsing1, Jonathan R. McDonald 1,2 & Warner A. Miller3 1Information Directorate, Air Force Research Laboratory, Rome, New York 13441 2Insitut f¨ur Angewandte Mathematik, Friedrich-Schiller-Universit¨at-Jena, 07743 Jena, Germany 3Department of Physics, Florida Atlantic University, Boca Raton, FL 33431 E-mail: [email protected] Abstract. The Ricci tensor (Ric) is fundamental to Einstein’s geometric theory of gravitation. The 3-dimensional Ric of a spacelike surface vanishes at the moment of time symmetry for vacuum spacetimes. The 4-dimensional Ric is the Einstein tensor for such spacetimes. More recently the Ric was used by Hamilton to define a non-linear, diffusive Ricci flow (RF) that was fundamental to Perelman’s proof of the Poincar`e conjecture. Analytic applications of RF can be found in many fields including general relativity and mathematics. Numerically it has been applied broadly to communication networks, medical physics, computer design and more. In this paper, we use Regge calculus (RC) to provide the first geometric discretization of the Ric. This result is fundamental for higher-dimensional generalizations of discrete RF. We construct this tensor on both the simplicial lattice and its dual and prove their equivalence. We show that the Ric is an edge-based weighted average of deficit divided by an edge-based weighted average of dual area – an expression similar to the vertex-based weighted average of the scalar curvature reported recently. We use this Ric in a third and independent geometric derivation of the RC Einstein tensor in arbitrary dimension. arXiv:1107.2458v1 [gr-qc] 13 Jul 2011 The Simplicial Ricci Tensor 2 1. -
General Relativity
GENERAL RELATIVITY IAN LIM LAST UPDATED JANUARY 25, 2019 These notes were taken for the General Relativity course taught by Malcolm Perry at the University of Cambridge as part of the Mathematical Tripos Part III in Michaelmas Term 2018. I live-TEXed them using TeXworks, and as such there may be typos; please send questions, comments, complaints, and corrections to [email protected]. Many thanks to Arun Debray for the LATEX template for these lecture notes: as of the time of writing, you can find him at https://web.ma.utexas.edu/users/a.debray/. Contents 1. Friday, October 5, 2018 1 2. Monday, October 8, 2018 4 3. Wednesday, October 10, 20186 4. Friday, October 12, 2018 10 5. Wednesday, October 17, 2018 12 6. Friday, October 19, 2018 15 7. Monday, October 22, 2018 17 8. Wednesday, October 24, 2018 22 9. Friday, October 26, 2018 26 10. Monday, October 29, 2018 28 11. Wednesday, October 31, 2018 32 12. Friday, November 2, 2018 34 13. Monday, November 5, 2018 38 14. Wednesday, November 7, 2018 40 15. Friday, November 9, 2018 44 16. Monday, November 12, 2018 48 17. Wednesday, November 14, 2018 52 18. Friday, November 16, 2018 55 19. Monday, November 19, 2018 57 20. Wednesday, November 21, 2018 62 21. Friday, November 23, 2018 64 22. Monday, November 26, 2018 67 23. Wednesday, November 28, 2018 70 Lecture 1. Friday, October 5, 2018 Unlike in previous years, this course is intended to be a stand-alone course on general relativity, building up the mathematical formalism needed to construct the full theory and explore some examples of interesting spacetime metrics. -

1 Electromagnetic Fields and Charges In
Electromagnetic fields and charges in ‘3+1’ spacetime derived from symmetry in ‘3+3’ spacetime J.E.Carroll Dept. of Engineering, University of Cambridge, CB2 1PZ E-mail: [email protected] PACS 11.10.Kk Field theories in dimensions other than 4 03.50.De Classical electromagnetism, Maxwell equations 41.20Jb Electromagnetic wave propagation 14.80.Hv Magnetic monopoles 14.70.Bh Photons 11.30.Rd Chiral Symmetries Abstract: Maxwell’s classic equations with fields, potentials, positive and negative charges in ‘3+1’ spacetime are derived solely from the symmetry that is required by the Geometric Algebra of a ‘3+3’ spacetime. The observed direction of time is augmented by two additional orthogonal temporal dimensions forming a complex plane where i is the bi-vector determining this plane. Variations in the ‘transverse’ time determine a zero rest mass. Real fields and sources arise from averaging over a contour in transverse time. Positive and negative charges are linked with poles and zeros generating traditional plane waves with ‘right-handed’ E, B, with a direction of propagation k. Conjugation and space-reversal give ‘left-handed’ plane waves without any net change in the chirality of ‘3+3’ spacetime. Resonant wave-packets of left- and right- handed waves can be formed with eigen frequencies equal to the characteristic frequencies (N+½)fO that are observed for photons. 1 1. Introduction There are many and varied starting points for derivations of Maxwell’s equations. For example Kobe uses the gauge invariance of the Schrödinger equation [1] while Feynman, as reported by Dyson, starts with Newton’s classical laws along with quantum non- commutation rules of position and momentum [2]. -

Differential Geometry: Curvature and Holonomy Austin Christian
University of Texas at Tyler Scholar Works at UT Tyler Math Theses Math Spring 5-5-2015 Differential Geometry: Curvature and Holonomy Austin Christian Follow this and additional works at: https://scholarworks.uttyler.edu/math_grad Part of the Mathematics Commons Recommended Citation Christian, Austin, "Differential Geometry: Curvature and Holonomy" (2015). Math Theses. Paper 5. http://hdl.handle.net/10950/266 This Thesis is brought to you for free and open access by the Math at Scholar Works at UT Tyler. It has been accepted for inclusion in Math Theses by an authorized administrator of Scholar Works at UT Tyler. For more information, please contact [email protected]. DIFFERENTIAL GEOMETRY: CURVATURE AND HOLONOMY by AUSTIN CHRISTIAN A thesis submitted in partial fulfillment of the requirements for the degree of Master of Science Department of Mathematics David Milan, Ph.D., Committee Chair College of Arts and Sciences The University of Texas at Tyler May 2015 c Copyright by Austin Christian 2015 All rights reserved Acknowledgments There are a number of people that have contributed to this project, whether or not they were aware of their contribution. For taking me on as a student and learning differential geometry with me, I am deeply indebted to my advisor, David Milan. Without himself being a geometer, he has helped me to develop an invaluable intuition for the field, and the freedom he has afforded me to study things that I find interesting has given me ample room to grow. For introducing me to differential geometry in the first place, I owe a great deal of thanks to my undergraduate advisor, Robert Huff; our many fruitful conversations, mathematical and otherwise, con- tinue to affect my approach to mathematics. -
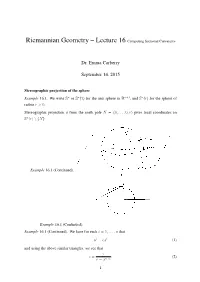
Riemannian Geometry – Lecture 16 Computing Sectional Curvatures
Riemannian Geometry – Lecture 16 Computing Sectional Curvatures Dr. Emma Carberry September 14, 2015 Stereographic projection of the sphere Example 16.1. We write Sn or Sn(1) for the unit sphere in Rn+1, and Sn(r) for the sphere of radius r > 0. Stereographic projection φ from the north pole N = (0;:::; 0; r) gives local coordinates on Sn(r) n fNg Example 16.1 (Continued). Example 16.1 (Continued). Example 16.1 (Continued). We have for each i = 1; : : : ; n that ui = cxi (1) and using the above similar triangles, we see that r c = : (2) r − xn+1 1 Hence stereographic projection φ : Sn n fNg ! Rn is given by rx1 rxn φ(x1; : : : ; xn; xn+1) = ;:::; r − xn+1 r − xn+1 The inverse φ−1 of stereographic projection is given by (exercise) 2r2ui xi = ; i = 1; : : : ; n juj2 + r2 2r3 xn+1 = r − : juj2 + r2 and so we see that stereographic projection is a diffeomorphism. Stereographic projection is conformal Definition 16.2. A local coordinate chart (U; φ) on Riemannian manifold (M; g) is conformal if for any p 2 U and X; Y 2 TpM, 2 gp(X; Y ) = F (p) hdφp(X); dφp(Y )i where F : U ! R is a nowhere vanishing smooth function and on the right-hand side we are using the usual Euclidean inner product. Exercise 16.3. Prove that this is equivalent to: 1. dφp preserving angles, where the angle between X and Y is defined (up to adding multi- ples of 2π) by g(X; Y ) cos θ = pg(X; X)pg(Y; Y ) and also to 2 2. -

Math 865, Topics in Riemannian Geometry
Math 865, Topics in Riemannian Geometry Jeff A. Viaclovsky Fall 2007 Contents 1 Introduction 3 2 Lecture 1: September 4, 2007 4 2.1 Metrics, vectors, and one-forms . 4 2.2 The musical isomorphisms . 4 2.3 Inner product on tensor bundles . 5 2.4 Connections on vector bundles . 6 2.5 Covariant derivatives of tensor fields . 7 2.6 Gradient and Hessian . 9 3 Lecture 2: September 6, 2007 9 3.1 Curvature in vector bundles . 9 3.2 Curvature in the tangent bundle . 10 3.3 Sectional curvature, Ricci tensor, and scalar curvature . 13 4 Lecture 3: September 11, 2007 14 4.1 Differential Bianchi Identity . 14 4.2 Algebraic study of the curvature tensor . 15 5 Lecture 4: September 13, 2007 19 5.1 Orthogonal decomposition of the curvature tensor . 19 5.2 The curvature operator . 20 5.3 Curvature in dimension three . 21 6 Lecture 5: September 18, 2007 22 6.1 Covariant derivatives redux . 22 6.2 Commuting covariant derivatives . 24 6.3 Rough Laplacian and gradient . 25 7 Lecture 6: September 20, 2007 26 7.1 Commuting Laplacian and Hessian . 26 7.2 An application to PDE . 28 1 8 Lecture 7: Tuesday, September 25. 29 8.1 Integration and adjoints . 29 9 Lecture 8: September 23, 2007 34 9.1 Bochner and Weitzenb¨ock formulas . 34 10 Lecture 9: October 2, 2007 38 10.1 Manifolds with positive curvature operator . 38 11 Lecture 10: October 4, 2007 41 11.1 Killing vector fields . 41 11.2 Isometries . 44 12 Lecture 11: October 9, 2007 45 12.1 Linearization of Ricci tensor . -

Elementary Differential Geometry
ELEMENTARY DIFFERENTIAL GEOMETRY YONG-GEUN OH { Based on the lecture note of Math 621-2020 in POSTECH { Contents Part 1. Riemannian Geometry 2 1. Parallelism and Ehresman connection 2 2. Affine connections on vector bundles 4 2.1. Local expression of covariant derivatives 6 2.2. Affine connection recovers Ehresmann connection 7 2.3. Curvature 9 2.4. Metrics and Euclidean connections 9 3. Riemannian metrics and Levi-Civita connection 10 3.1. Examples of Riemannian manifolds 12 3.2. Covariant derivative along the curve 13 4. Riemann curvature tensor 15 5. Raising and lowering indices and contractions 17 6. Geodesics and exponential maps 19 7. First variation of arc-length 22 8. Geodesic normal coordinates and geodesic balls 25 9. Hopf-Rinow Theorem 31 10. Classification of constant curvature surfaces 33 11. Second variation of energy 34 Part 2. Symplectic Geometry 39 12. Geometry of cotangent bundles 39 13. Poisson manifolds and Schouten-Nijenhuis bracket 42 13.1. Poisson tensor and Jacobi identity 43 13.2. Lie-Poisson space 44 14. Symplectic forms and the Jacobi identity 45 15. Proof of Darboux' Theorem 47 15.1. Symplectic linear algebra 47 15.2. Moser's deformation method 48 16. Hamiltonian vector fields and diffeomorhpisms 50 17. Autonomous Hamiltonians and conservation law 53 18. Completely integrable systems and action-angle variables 55 18.1. Construction of angle coordinates 56 18.2. Construction of action coordinates 57 18.3. Underlying geometry of the Hamilton-Jacobi method 61 19. Lie groups and Lie algebras 62 1 2 YONG-GEUN OH 20. Group actions and adjoint representations 67 21. -

SECTIONAL CURVATURE-TYPE CONDITIONS on METRIC SPACES 2 and Poincaré Conditions, and Even the Measure Contraction Property
SECTIONAL CURVATURE-TYPE CONDITIONS ON METRIC SPACES MARTIN KELL Abstract. In the first part Busemann concavity as non-negative curvature is introduced and a bi-Lipschitz splitting theorem is shown. Furthermore, if the Hausdorff measure of a Busemann concave space is non-trivial then the space is doubling and satisfies a Poincaré condition and the measure contraction property. Using a comparison geometry variant for general lower curvature bounds k ∈ R, a Bonnet-Myers theorem can be proven for spaces with lower curvature bound k > 0. In the second part the notion of uniform smoothness known from the theory of Banach spaces is applied to metric spaces. It is shown that Busemann functions are (quasi-)convex. This implies the existence of a weak soul. In the end properties are developed to further dissect the soul. In order to understand the influence of curvature on the geometry of a space it helps to develop a synthetic notion. Via comparison geometry sectional curvature bounds can be obtained by demanding that triangles are thinner or fatter than the corresponding comparison triangles. The two classes are called CAT (κ)- and resp. CBB(κ)-spaces. We refer to the book [BH99] and the forthcoming book [AKP] (see also [BGP92, Ots97]). Note that all those notions imply a Riemannian character of the metric space. In particular, the angle between two geodesics starting at a com- mon point is well-defined. Busemann investigated a weaker notion of non-positive curvature which also applies to normed spaces [Bus55, Section 36]. A similar idea was developed by Pedersen [Ped52] (see also [Bus55, (36.15)]). -

CURVATURE E. L. Lady the Curvature of a Curve Is, Roughly Speaking, the Rate at Which That Curve Is Turning. Since the Tangent L
1 CURVATURE E. L. Lady The curvature of a curve is, roughly speaking, the rate at which that curve is turning. Since the tangent line or the velocity vector shows the direction of the curve, this means that the curvature is, roughly, the rate at which the tangent line or velocity vector is turning. There are two refinements needed for this definition. First, the rate at which the tangent line of a curve is turning will depend on how fast one is moving along the curve. But curvature should be a geometric property of the curve and not be changed by the way one moves along it. Thus we define curvature to be the absolute value of the rate at which the tangent line is turning when one moves along the curve at a speed of one unit per second. At first, remembering the determination in Calculus I of whether a curve is curving upwards or downwards (“concave up or concave down”) it may seem that curvature should be a signed quantity. However a little thought shows that this would be undesirable. If one looks at a circle, for instance, the top is concave down and the bottom is concave up, but clearly one wants the curvature of a circle to be positive all the way round. Negative curvature simply doesn’t make sense for curves. The second problem with defining curvature to be the rate at which the tangent line is turning is that one has to figure out what this means. The Curvature of a Graph in the Plane. -

3. Sectional Curvature of Lorentzian Manifolds. 1
3. SECTIONAL CURVATURE OF LORENTZIAN MANIFOLDS. 1. Sectional curvature, the Jacobi equation and \tidal stresses". The (3,1) Riemann curvature tensor has the same definition in the rie- mannian and Lorentzian cases: R(X; Y )Z = rX rY Z − rY rX Z − r[X;Y ]Z: If f(t; s) is a parametrized 2-surface in M (immersion) and W (t; s) is a vector field on M along f, we have the Ricci formula: D DW D DW − = R(@ f; @ f)W: @t @s @s @t t s For a variation f(t; s) = γs(t) of a geodesic γ(t) (with variational vector field J(t) = @sfjs=0 along γ(t)) this leads to the Jacobi equation for J: D2J + R(J; γ_ )_γ = 0: dt2 ? The Jacobi operator is the self-adjoint operator on (γ _ ) : Rp[v] = Rp(v; γ_ )_γ. When γ is a timelike geodesic (the worldline of a free-falling massive particle) the physical interpretation of J is the relative displacement (space- like) vector of a neighboring free-falling particle, while the second covariant 00 derivative J represents its relative acceleration. The Jacobi operator Rp gives the \tidal stresses" in terms of the position vector J. In the Lorentzian case, the sectional curvature is defined only for non- degenerate two-planes Π ⊂ TpM. Definition. Let Π = spanfX; Y g be a non-degenerate two-dimensional subspace of TpM. The sectional curvature σXY = σΠ is the real number σ defined by: hR(X; Y )Y; Xi = σhX ^ Y; X ^ Y i: Remark: by a result of J. -

Hyperbolic Geometry
Flavors of Geometry MSRI Publications Volume 31,1997 Hyperbolic Geometry JAMES W. CANNON, WILLIAM J. FLOYD, RICHARD KENYON, AND WALTER R. PARRY Contents 1. Introduction 59 2. The Origins of Hyperbolic Geometry 60 3. Why Call it Hyperbolic Geometry? 63 4. Understanding the One-Dimensional Case 65 5. Generalizing to Higher Dimensions 67 6. Rudiments of Riemannian Geometry 68 7. Five Models of Hyperbolic Space 69 8. Stereographic Projection 72 9. Geodesics 77 10. Isometries and Distances in the Hyperboloid Model 80 11. The Space at Infinity 84 12. The Geometric Classification of Isometries 84 13. Curious Facts about Hyperbolic Space 86 14. The Sixth Model 95 15. Why Study Hyperbolic Geometry? 98 16. When Does a Manifold Have a Hyperbolic Structure? 103 17. How to Get Analytic Coordinates at Infinity? 106 References 108 Index 110 1. Introduction Hyperbolic geometry was created in the first half of the nineteenth century in the midst of attempts to understand Euclid’s axiomatic basis for geometry. It is one type of non-Euclidean geometry, that is, a geometry that discards one of Euclid’s axioms. Einstein and Minkowski found in non-Euclidean geometry a This work was supported in part by The Geometry Center, University of Minnesota, an STC funded by NSF, DOE, and Minnesota Technology, Inc., by the Mathematical Sciences Research Institute, and by NSF research grants. 59 60 J. W. CANNON, W. J. FLOYD, R. KENYON, AND W. R. PARRY geometric basis for the understanding of physical time and space. In the early part of the twentieth century every serious student of mathematics and physics studied non-Euclidean geometry. -

The Ricci Curvature of Rotationally Symmetric Metrics
The Ricci curvature of rotationally symmetric metrics Anna Kervison Supervisor: Dr Artem Pulemotov The University of Queensland 1 1 Introduction Riemannian geometry is a branch of differential non-Euclidean geometry developed by Bernhard Riemann, used to describe curved space. In Riemannian geometry, a manifold is a topological space that locally resembles Euclidean space. This means that at any point on the manifold, there exists a neighbourhood around that point that appears ‘flat’and could be mapped into the Euclidean plane. For example, circles are one-dimensional manifolds but a figure eight is not as it cannot be pro- jected into the Euclidean plane at the intersection. Surfaces such as the sphere and the torus are examples of two-dimensional manifolds. The shape of a manifold is defined by the Riemannian metric, which is a measure of the length of tangent vectors and curves in the manifold. It can be thought of as locally a matrix valued function. The Ricci curvature is one of the most sig- nificant geometric characteristics of a Riemannian metric. It provides a measure of the curvature of the manifold in much the same way the second derivative of a single valued function provides a measure of the curvature of a graph. Determining the Ricci curvature of a metric is difficult, as it is computed from a lengthy ex- pression involving the derivatives of components of the metric up to order two. In fact, without additional simplifications, the formula for the Ricci curvature given by this definition is essentially unmanageable. Rn is one of the simplest examples of a manifold.