Curvature of Riemannian Manifolds
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Differential Geometry: Curvature and Holonomy Austin Christian
University of Texas at Tyler Scholar Works at UT Tyler Math Theses Math Spring 5-5-2015 Differential Geometry: Curvature and Holonomy Austin Christian Follow this and additional works at: https://scholarworks.uttyler.edu/math_grad Part of the Mathematics Commons Recommended Citation Christian, Austin, "Differential Geometry: Curvature and Holonomy" (2015). Math Theses. Paper 5. http://hdl.handle.net/10950/266 This Thesis is brought to you for free and open access by the Math at Scholar Works at UT Tyler. It has been accepted for inclusion in Math Theses by an authorized administrator of Scholar Works at UT Tyler. For more information, please contact [email protected]. DIFFERENTIAL GEOMETRY: CURVATURE AND HOLONOMY by AUSTIN CHRISTIAN A thesis submitted in partial fulfillment of the requirements for the degree of Master of Science Department of Mathematics David Milan, Ph.D., Committee Chair College of Arts and Sciences The University of Texas at Tyler May 2015 c Copyright by Austin Christian 2015 All rights reserved Acknowledgments There are a number of people that have contributed to this project, whether or not they were aware of their contribution. For taking me on as a student and learning differential geometry with me, I am deeply indebted to my advisor, David Milan. Without himself being a geometer, he has helped me to develop an invaluable intuition for the field, and the freedom he has afforded me to study things that I find interesting has given me ample room to grow. For introducing me to differential geometry in the first place, I owe a great deal of thanks to my undergraduate advisor, Robert Huff; our many fruitful conversations, mathematical and otherwise, con- tinue to affect my approach to mathematics. -
Riemannian Geometry – Lecture 16 Computing Sectional Curvatures
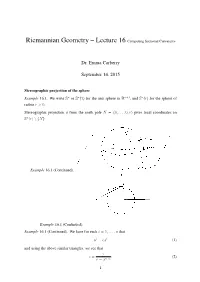
Riemannian Geometry – Lecture 16 Computing Sectional Curvatures Dr. Emma Carberry September 14, 2015 Stereographic projection of the sphere Example 16.1. We write Sn or Sn(1) for the unit sphere in Rn+1, and Sn(r) for the sphere of radius r > 0. Stereographic projection φ from the north pole N = (0;:::; 0; r) gives local coordinates on Sn(r) n fNg Example 16.1 (Continued). Example 16.1 (Continued). Example 16.1 (Continued). We have for each i = 1; : : : ; n that ui = cxi (1) and using the above similar triangles, we see that r c = : (2) r − xn+1 1 Hence stereographic projection φ : Sn n fNg ! Rn is given by rx1 rxn φ(x1; : : : ; xn; xn+1) = ;:::; r − xn+1 r − xn+1 The inverse φ−1 of stereographic projection is given by (exercise) 2r2ui xi = ; i = 1; : : : ; n juj2 + r2 2r3 xn+1 = r − : juj2 + r2 and so we see that stereographic projection is a diffeomorphism. Stereographic projection is conformal Definition 16.2. A local coordinate chart (U; φ) on Riemannian manifold (M; g) is conformal if for any p 2 U and X; Y 2 TpM, 2 gp(X; Y ) = F (p) hdφp(X); dφp(Y )i where F : U ! R is a nowhere vanishing smooth function and on the right-hand side we are using the usual Euclidean inner product. Exercise 16.3. Prove that this is equivalent to: 1. dφp preserving angles, where the angle between X and Y is defined (up to adding multi- ples of 2π) by g(X; Y ) cos θ = pg(X; X)pg(Y; Y ) and also to 2 2. -

SECTIONAL CURVATURE-TYPE CONDITIONS on METRIC SPACES 2 and Poincaré Conditions, and Even the Measure Contraction Property
SECTIONAL CURVATURE-TYPE CONDITIONS ON METRIC SPACES MARTIN KELL Abstract. In the first part Busemann concavity as non-negative curvature is introduced and a bi-Lipschitz splitting theorem is shown. Furthermore, if the Hausdorff measure of a Busemann concave space is non-trivial then the space is doubling and satisfies a Poincaré condition and the measure contraction property. Using a comparison geometry variant for general lower curvature bounds k ∈ R, a Bonnet-Myers theorem can be proven for spaces with lower curvature bound k > 0. In the second part the notion of uniform smoothness known from the theory of Banach spaces is applied to metric spaces. It is shown that Busemann functions are (quasi-)convex. This implies the existence of a weak soul. In the end properties are developed to further dissect the soul. In order to understand the influence of curvature on the geometry of a space it helps to develop a synthetic notion. Via comparison geometry sectional curvature bounds can be obtained by demanding that triangles are thinner or fatter than the corresponding comparison triangles. The two classes are called CAT (κ)- and resp. CBB(κ)-spaces. We refer to the book [BH99] and the forthcoming book [AKP] (see also [BGP92, Ots97]). Note that all those notions imply a Riemannian character of the metric space. In particular, the angle between two geodesics starting at a com- mon point is well-defined. Busemann investigated a weaker notion of non-positive curvature which also applies to normed spaces [Bus55, Section 36]. A similar idea was developed by Pedersen [Ped52] (see also [Bus55, (36.15)]). -

CURVATURE E. L. Lady the Curvature of a Curve Is, Roughly Speaking, the Rate at Which That Curve Is Turning. Since the Tangent L
1 CURVATURE E. L. Lady The curvature of a curve is, roughly speaking, the rate at which that curve is turning. Since the tangent line or the velocity vector shows the direction of the curve, this means that the curvature is, roughly, the rate at which the tangent line or velocity vector is turning. There are two refinements needed for this definition. First, the rate at which the tangent line of a curve is turning will depend on how fast one is moving along the curve. But curvature should be a geometric property of the curve and not be changed by the way one moves along it. Thus we define curvature to be the absolute value of the rate at which the tangent line is turning when one moves along the curve at a speed of one unit per second. At first, remembering the determination in Calculus I of whether a curve is curving upwards or downwards (“concave up or concave down”) it may seem that curvature should be a signed quantity. However a little thought shows that this would be undesirable. If one looks at a circle, for instance, the top is concave down and the bottom is concave up, but clearly one wants the curvature of a circle to be positive all the way round. Negative curvature simply doesn’t make sense for curves. The second problem with defining curvature to be the rate at which the tangent line is turning is that one has to figure out what this means. The Curvature of a Graph in the Plane. -

Chapter 13 Curvature in Riemannian Manifolds
Chapter 13 Curvature in Riemannian Manifolds 13.1 The Curvature Tensor If (M, , )isaRiemannianmanifoldand is a connection on M (that is, a connection on TM−), we− saw in Section 11.2 (Proposition 11.8)∇ that the curvature induced by is given by ∇ R(X, Y )= , ∇X ◦∇Y −∇Y ◦∇X −∇[X,Y ] for all X, Y X(M), with R(X, Y ) Γ( om(TM,TM)) = Hom (Γ(TM), Γ(TM)). ∈ ∈ H ∼ C∞(M) Since sections of the tangent bundle are vector fields (Γ(TM)=X(M)), R defines a map R: X(M) X(M) X(M) X(M), × × −→ and, as we observed just after stating Proposition 11.8, R(X, Y )Z is C∞(M)-linear in X, Y, Z and skew-symmetric in X and Y .ItfollowsthatR defines a (1, 3)-tensor, also denoted R, with R : T M T M T M T M. p p × p × p −→ p Experience shows that it is useful to consider the (0, 4)-tensor, also denoted R,givenby R (x, y, z, w)= R (x, y)z,w p p p as well as the expression R(x, y, y, x), which, for an orthonormal pair, of vectors (x, y), is known as the sectional curvature, K(x, y). This last expression brings up a dilemma regarding the choice for the sign of R. With our present choice, the sectional curvature, K(x, y), is given by K(x, y)=R(x, y, y, x)but many authors define K as K(x, y)=R(x, y, x, y). Since R(x, y)isskew-symmetricinx, y, the latter choice corresponds to using R(x, y)insteadofR(x, y), that is, to define R(X, Y ) by − R(X, Y )= + . -

3. Sectional Curvature of Lorentzian Manifolds. 1
3. SECTIONAL CURVATURE OF LORENTZIAN MANIFOLDS. 1. Sectional curvature, the Jacobi equation and \tidal stresses". The (3,1) Riemann curvature tensor has the same definition in the rie- mannian and Lorentzian cases: R(X; Y )Z = rX rY Z − rY rX Z − r[X;Y ]Z: If f(t; s) is a parametrized 2-surface in M (immersion) and W (t; s) is a vector field on M along f, we have the Ricci formula: D DW D DW − = R(@ f; @ f)W: @t @s @s @t t s For a variation f(t; s) = γs(t) of a geodesic γ(t) (with variational vector field J(t) = @sfjs=0 along γ(t)) this leads to the Jacobi equation for J: D2J + R(J; γ_ )_γ = 0: dt2 ? The Jacobi operator is the self-adjoint operator on (γ _ ) : Rp[v] = Rp(v; γ_ )_γ. When γ is a timelike geodesic (the worldline of a free-falling massive particle) the physical interpretation of J is the relative displacement (space- like) vector of a neighboring free-falling particle, while the second covariant 00 derivative J represents its relative acceleration. The Jacobi operator Rp gives the \tidal stresses" in terms of the position vector J. In the Lorentzian case, the sectional curvature is defined only for non- degenerate two-planes Π ⊂ TpM. Definition. Let Π = spanfX; Y g be a non-degenerate two-dimensional subspace of TpM. The sectional curvature σXY = σΠ is the real number σ defined by: hR(X; Y )Y; Xi = σhX ^ Y; X ^ Y i: Remark: by a result of J. -
Differential Geometry of Diffeomorphism Groups
CHAPTER IV DIFFERENTIAL GEOMETRY OF DIFFEOMORPHISM GROUPS In EN Lorenz stated that a twoweek forecast would b e the theoretical b ound for predicting the future state of the atmosphere using largescale numerical mo dels Lor Mo dern meteorology has currently reached a go o d correlation of the observed versus predicted for roughly seven days in the northern hemisphere whereas this p erio d is shortened by half in the southern hemisphere and by two thirds in the tropics for the same level of correlation Kri These dierences are due to a very simple factor the available data density The mathematical reason for the dierences and for the overall longterm unre liability of weather forecasts is the exp onential scattering of ideal uid or atmo spheric ows with close initial conditions which in turn is related to the negative curvatures of the corresp onding groups of dieomorphisms as Riemannian mani folds We will see that the conguration space of an ideal incompressible uid is highly nonat and has very p eculiar interior and exterior dierential geom etry Interior or intrinsic characteristics of a Riemannian manifold are those p ersisting under any isometry of the manifold For instance one can b end ie map isometrically a sheet of pap er into a cone or a cylinder but never without stretching or cutting into a piece of a sphere The invariant that distinguishes Riemannian metrics is called Riemannian curvature The Riemannian curvature of a plane is zero and the curvature of a sphere of radius R is equal to R If one Riemannian manifold can b e -

Hodge Theory
HODGE THEORY PETER S. PARK Abstract. This exposition of Hodge theory is a slightly retooled version of the author's Harvard minor thesis, advised by Professor Joe Harris. Contents 1. Introduction 1 2. Hodge Theory of Compact Oriented Riemannian Manifolds 2 2.1. Hodge star operator 2 2.2. The main theorem 3 2.3. Sobolev spaces 5 2.4. Elliptic theory 11 2.5. Proof of the main theorem 14 3. Hodge Theory of Compact K¨ahlerManifolds 17 3.1. Differential operators on complex manifolds 17 3.2. Differential operators on K¨ahlermanifolds 20 3.3. Bott{Chern cohomology and the @@-Lemma 25 3.4. Lefschetz decomposition and the Hodge index theorem 26 Acknowledgments 30 References 30 1. Introduction Our objective in this exposition is to state and prove the main theorems of Hodge theory. In Section 2, we first describe a key motivation behind the Hodge theory for compact, closed, oriented Riemannian manifolds: the observation that the differential forms that satisfy certain par- tial differential equations depending on the choice of Riemannian metric (forms in the kernel of the associated Laplacian operator, or harmonic forms) turn out to be precisely the norm-minimizing representatives of the de Rham cohomology classes. This naturally leads to the statement our first main theorem, the Hodge decomposition|for a given compact, closed, oriented Riemannian manifold|of the space of smooth k-forms into the image of the Laplacian and its kernel, the sub- space of harmonic forms. We then develop the analytic machinery|specifically, Sobolev spaces and the theory of elliptic differential operators|that we use to prove the aforementioned decom- position, which immediately yields as a corollary the phenomenon of Poincar´eduality. -

Lecture 8: the Sectional and Ricci Curvatures
LECTURE 8: THE SECTIONAL AND RICCI CURVATURES 1. The Sectional Curvature We start with some simple linear algebra. As usual we denote by ⊗2(^2V ∗) the set of 4-tensors that is anti-symmetric with respect to the first two entries and with respect to the last two entries. Lemma 1.1. Suppose T 2 ⊗2(^2V ∗), X; Y 2 V . Let X0 = aX +bY; Y 0 = cX +dY , then T (X0;Y 0;X0;Y 0) = (ad − bc)2T (X; Y; X; Y ): Proof. This follows from a very simple computation: T (X0;Y 0;X0;Y 0) = T (aX + bY; cX + dY; aX + bY; cX + dY ) = (ad − bc)T (X; Y; aX + bY; cX + dY ) = (ad − bc)2T (X; Y; X; Y ): 1 Now suppose (M; g) is a Riemannian manifold. Recall that 2 g ^ g is a curvature- like tensor, such that 1 g ^ g(X ;Y ;X ;Y ) = hX ;X ihY ;Y i − hX ;Y i2: 2 p p p p p p p p p p 1 Applying the previous lemma to Rm and 2 g ^ g, we immediately get Proposition 1.2. The quantity Rm(Xp;Yp;Xp;Yp) K(Xp;Yp) := 2 hXp;XpihYp;Ypi − hXp;Ypi depends only on the two dimensional plane Πp = span(Xp;Yp) ⊂ TpM, i.e. it is independent of the choices of basis fXp;Ypg of Πp. Definition 1.3. We will call K(Πp) = K(Xp;Yp) the sectional curvature of (M; g) at p with respect to the plane Πp. Remark. The sectional curvature K is NOT a function on M (for dim M > 2), but a function on the Grassmann bundle Gm;2(M) of M. -

A Space Curve Is a Smooth Map Γ : I ⊂ R → R 3. in Our Analysis of Defining
What is a Space Curve? A space curve is a smooth map γ : I ⊂ R ! R3. In our analysis of defining the curvature for space curves we will be able to take the inclusion (γ; 0) and have that the curvature of (γ; 0) is the same as the curvature of γ where γ : I ! R2. Hence, in this part of the talk, γ will always be a space curve. We will make one more restriction on γ, namely that γ0(t) 6= ~0 for no t in its domain. Curves with this property are said to be regular. We now give a complete definition of the curves in which we will study, however after another remark, we will refine that definition as well. Definition: A regular space curve is the image of a smooth map γ : I ⊂ R ! R3 such that γ0 6= ~0; 8t. Since γ and it's image are uniquely related up to reparametrization, one usually just says that a curve is a map i.e making no distinction between the two. The remark about being unique up to reparametrization is precisely the reason why our next restriction will make sense. It turns out that every regular curve admits a unit speed reparametrization. This property proves to be a very remarkable one especially in the case of proving theorems. Note: In practice it is extremely difficult to find a unit speed reparametrization of a general space curve. Before proceeding we remind ourselves of the definition for reparametrization and comment on why regular curves admit unit speed reparametrizations. -

Semi-Riemannian Manifold Optimization
Semi-Riemannian Manifold Optimization Tingran Gao William H. Kruskal Instructor Committee on Computational and Applied Mathematics (CCAM) Department of Statistics The University of Chicago 2018 China-Korea International Conference on Matrix Theory with Applications Shanghai University, Shanghai, China December 19, 2018 Outline Motivation I Riemannian Manifold Optimization I Barrier Functions and Interior Point Methods Semi-Riemannian Manifold Optimization I Optimality Conditions I Descent Direction I Semi-Riemannian First Order Methods I Metric Independence of Second Order Methods Optimization on Semi-Riemannian Submanifolds Joint work with Lek-Heng Lim (The University of Chicago) and Ke Ye (Chinese Academy of Sciences) Riemannian Manifold Optimization I Optimization on manifolds: min f (x) x2M where (M; g) is a (typically nonlinear, non-convex) Riemannian manifold, f : M! R is a smooth function on M I Difficult constrained optimization; handled as unconstrained optimization from the perspective of manifold optimization I Key ingredients: tangent spaces, geodesics, exponential map, parallel transport, gradient rf , Hessian r2f Riemannian Manifold Optimization I Riemannian Steepest Descent x = Exp (−trf (x )) ; t ≥ 0 k+1 xk k I Riemannian Newton's Method 2 r f (xk ) ηk = −∇f (xk ) x = Exp (−tη ) ; t ≥ 0 k+1 xk k I Riemannian trust region I Riemannian conjugate gradient I ...... Gabay (1982), Smith (1994), Edelman et al. (1998), Absil et al. (2008), Adler et al. (2002), Ring and Wirth (2012), Huang et al. (2015), Sato (2016), etc. Riemannian Manifold Optimization I Applications: Optimization problems on matrix manifolds I Stiefel manifolds n Vk (R ) = O (n) =O (k) I Grassmannian manifolds Gr (k; n) = O (n) = (O (k) × O (n − k)) I Flag manifolds: for n1 + ··· + nd = n, Flag = O (n) = (O (n ) × · · · × O (n )) n1;··· ;nd 1 d I Shape Spaces k×n R n f0g =O (n) I ..... -

AN INTRODUCTION to the CURVATURE of SURFACES by PHILIP ANTHONY BARILE a Thesis Submitted to the Graduate School-Camden Rutgers
AN INTRODUCTION TO THE CURVATURE OF SURFACES By PHILIP ANTHONY BARILE A thesis submitted to the Graduate School-Camden Rutgers, The State University Of New Jersey in partial fulfillment of the requirements for the degree of Master of Science Graduate Program in Mathematics written under the direction of Haydee Herrera and approved by Camden, NJ January 2009 ABSTRACT OF THE THESIS An Introduction to the Curvature of Surfaces by PHILIP ANTHONY BARILE Thesis Director: Haydee Herrera Curvature is fundamental to the study of differential geometry. It describes different geometrical and topological properties of a surface in R3. Two types of curvature are discussed in this paper: intrinsic and extrinsic. Numerous examples are given which motivate definitions, properties and theorems concerning curvature. ii 1 1 Introduction For surfaces in R3, there are several different ways to measure curvature. Some curvature, like normal curvature, has the property such that it depends on how we embed the surface in R3. Normal curvature is extrinsic; that is, it could not be measured by being on the surface. On the other hand, another measurement of curvature, namely Gauss curvature, does not depend on how we embed the surface in R3. Gauss curvature is intrinsic; that is, it can be measured from on the surface. In order to engage in a discussion about curvature of surfaces, we must introduce some important concepts such as regular surfaces, the tangent plane, the first and second fundamental form, and the Gauss Map. Sections 2,3 and 4 introduce these preliminaries, however, their importance should not be understated as they lay the groundwork for more subtle and advanced topics in differential geometry.