Designing a CPU CPU: “Central Processing Unit” Computer: CPU + Display + Optical Disk + Metal Case + Power Supply +
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

The Instruction Set Architecture
Quiz 0 Lecture 2: The Instruction Set Architecture COS / ELE 375 Computer Architecture and Organization Princeton University Fall 2015 Prof. David August 1 2 Quiz 0 CD 3 Miles of Music 3 4 Pits and Lands Interpretation 0 1 1 1 0 1 0 1 As Music: 011101012 = 117/256 position of speaker As Number: Transition represents a bit state (1/on/red/female/heads) 01110101 = 1 + 4 + 16 + 32 + 64 = 117 = 75 No change represents other state (0/off/white/male/tails) 2 10 16 (Get comfortable with base 2, 8, 10, and 16.) As Text: th 011101012 = 117 character in the ASCII codes = “u” 5 6 Interpretation – ASCII Princeton Computer Science Building West Wall 7 8 Interpretation Binary Code and Data (Hello World!) • Programs consist of Code and Data • Code and Data are Encoded in Bits IA-64 Binary (objdump) As Music: 011101012 = 117/256 position of speaker As Number: 011101012 = 1 + 4 + 16 + 32 + 64 = 11710 = 7516 As Text: th 011101012 = 117 character in the ASCII codes = “u” CAN ALSO BE INTERPRETED AS MACHINE INSTRUCTION! 9 Interfaces in Computer Systems Instructions Sequential Circuit!! Software: Produce Bits Instructing Machine to Manipulate State or Produce I/O Computers process information State Applications • Input/Output (I/O) Operating System • State (memory) • Computation (processor) Compiler Firmware Instruction Set Architecture Input Output Instruction Set Processor I/O System Datapath & Control Computation Digital Design Circuit Design • Instructions instruct processor to manipulate state Layout • Instructions instruct processor to produce I/O in the same way Hardware: Read and Obey Instruction Bits 12 State State – Main Memory Typical modern machine has this architectural state: Main Memory (AKA: RAM – Random Access Memory) 1. -

Comparison of Parallel and Pipelined CORDIC Algorithm Using RCA and CSA
Comparison of Parallel and Pipelined CORDIC algorithm using RCA and CSA Diego Barragan´ Guerrero Lu´ıs Geraldo P. Meloni FEEC - UNICAMP FEEC - UNICAMP Campinas, Sao˜ Paulo, Brazil, 13083-852 Campinas, Sao˜ Paulo, Brazil, 13083-852 +5519 9308-9952 +5519 9778-1523 [email protected] [email protected] Abstract— This paper presents an implementation of the algorithm has two modes of operation: the rotational mode CORDIC algorithm in digital hardware using two types of (RM) where the vector (xi; yi) is rotated by an angle θ to algebraic adders: Ripple-Carry Adder (RCA) and Carry-Select obtain a new vector (x ; y ), and the vectoring mode (VM) Adder (CSA), both in parallel and pipelined architectures. Anal- N N ysis of time performance and resources utilization was carried in which the algorithm computes the modulus R and phase α out by changing the algorithm number of iterations. These results from the x-axis of the vector (x0; y0). The basic principle of demonstrate the efficiency in operating frequency of the pipelined the algorithm is shown in Figure 1. architecture with respect to the parallel architecture. Also it is shown that the use of CSA reduce the timing processing without significantly increasing the slice use. The code was synthesized us- ing FPGA development tools for the Xilinx Spartan-3E xc3s500e ' ' E N y family. N E N Index Terms— CORDIC, pipelined, parallel, RCA, CSA, y N trigonometrics functions. Rotação Pseudo-rotação R N I. INTRODUCTION E i In Digital Signal Processing with FPGA, trigonometric y i R i functions are used in many signal algorithms, for instance N synchronization and equalization [12]. -

Chapter 7: AC Transistor Amplifiers
Chapter 7: Transistors, part 2 Chapter 7: AC Transistor Amplifiers The transistor amplifiers that we studied in the last chapter have some serious problems for use in AC signals. Their most serious shortcoming is that there is a “dead region” where small signals do not turn on the transistor. So, if your signal is smaller than 0.6 V, or if it is negative, the transistor does not conduct and the amplifier does not work. Design goals for an AC amplifier Before moving on to making a better AC amplifier, let’s define some useful terms. We define the output range to be the range of possible output voltages. We refer to the maximum and minimum output voltages as the rail voltages and the output swing is the difference between the rail voltages. The input range is the range of input voltages that produce outputs which are not at either rail voltage. Our goal in designing an AC amplifier is to get an input range and output range which is symmetric around zero and ensure that there is not a dead region. To do this we need make sure that the transistor is in conduction for all of our input range. How does this work? We do it by adding an offset voltage to the input to make sure the voltage presented to the transistor’s base with no input signal, the resting or quiescent voltage , is well above ground. In lab 6, the function generator provided the offset, in this chapter we will show how to design an amplifier which provides its own offset. -

Basics of Logic Design Arithmetic Logic Unit (ALU) Today's Lecture
Basics of Logic Design Arithmetic Logic Unit (ALU) CPS 104 Lecture 9 Today’s Lecture • Homework #3 Assigned Due March 3 • Project Groups assigned & posted to blackboard. • Project Specification is on Web Due April 19 • Building the building blocks… Outline • Review • Digital building blocks • An Arithmetic Logic Unit (ALU) Reading Appendix B, Chapter 3 © Alvin R. Lebeck CPS 104 2 Review: Digital Design • Logic Design, Switching Circuits, Digital Logic Recall: Everything is built from transistors • A transistor is a switch • It is either on or off • On or off can represent True or False Given a bunch of bits (0 or 1)… • Is this instruction a lw or a beq? • What register do I read? • How do I add two numbers? • Need a method to reason about complex expressions © Alvin R. Lebeck CPS 104 3 Review: Boolean Functions • Boolean functions have arguments that take two values ({T,F} or {0,1}) and they return a single or a set of ({T,F} or {0,1}) value(s). • Boolean functions can always be represented by a table called a “Truth Table” • Example: F: {0,1}3 -> {0,1}2 a b c f1f2 0 0 0 0 1 0 0 1 1 1 0 1 0 1 0 0 1 1 0 0 1 0 0 1 0 1 1 0 0 1 1 1 1 1 1 © Alvin R. Lebeck CPS 104 4 Review: Boolean Functions and Expressions F(A, B, C) = (A * B) + (~A * C) ABCF 0000 0011 0100 0111 1000 1010 1101 1111 © Alvin R. Lebeck CPS 104 5 Review: Boolean Gates • Gates are electronics devices that implement simple Boolean functions Examples a a AND(a,b) OR(a,b) a NOT(a) b b a XOR(a,b) a NAND(a,b) b b a NOR(a,b) a XNOR(a,b) b b © Alvin R. -

Binary Counter
Systems I: Computer Organization and Architecture Lecture 8: Registers and Counters Registers • A register is a group of flip-flops. – Each flip-flop stores one bit of data; n flip-flops are required to store n bits of data. – There are several different types of registers available commercially. – The simplest design is a register consisting only of flip- flops, with no other gates in the circuit. • Loading the register – transfer of new data into the register. • The flip-flops share a common clock pulse (frequently using a buffer to reduce power requirements). • Output could be sampled at any time. • Clearing the flip-flop (placing zeroes in all its bit) can be done through a special terminal on the flip-flop. 1 4-bit Register I0 D Q A0 Clock C I1 D Q A1 C I D Q 2 A2 C D Q A I3 3 C Clear Registers With Parallel Load • The clock usually provides a steady stream of pulses which are applied to all flip-flops in the system. • A separate control system is needed to determine when to load a particular register. • The Register with Parallel Load has a separate load input. – When it is cleared, the register receives it output as input. – When it is set, it received the load input. 2 4-bit Register With Parallel Load Load D Q A0 I0 C D Q A1 C I1 D Q A2 I2 C D Q A3 I3 C Clock Shift Registers • A shift register is a register which can shift its data in one or both directions. -

Simple Computer Example Register Structure
Simple Computer Example Register Structure Read pp. 27-85 Simple Computer • To illustrate how a computer operates, let us look at the design of a very simple computer • Specifications 1. Memory words are 16 bits in length 2. 2 12 = 4 K words of memory 3. Memory can be accessed in one clock cycle 4. Single Accumulator for ALU (AC) 5. Registers are fully connected Simple Computer Continued 4K x 16 Memory MAR 12 MDR 16 X PC 12 ALU IR 16 AC Simple Computer Specifications (continued) 6. Control signals • INCPC – causes PC to increment on clock edge - [PC] +1 PC •ACin - causes output of ALU to be stored in AC • GMDR2X – get memory data register to X - [MDR] X • Read (Write) – Read (Write) contents of memory location whose address is in MAR To implement instructions, control unit must break down the instruction into a series of register transfers (just like a complier must break down C program into a series of machine level instructions) Simple Computer (continued) • Typical microinstruction for reading memory State Register Transfer Control Line(s) Next State 1 [[MAR]] MDR Read 2 • Timing State 1 State 2 During State 1, Read set by control unit CLK - Data is read from memory - MDR changes at the Read beginning of State 2 - Read is completed in one clock cycle MDR Simple Computer (continued) • Study: how to write the microinstructions to implement 3 instructions • ADD address • ADD (address) • JMP address ADD address: add using direct addressing 0000 address [AC] + [address] AC ADD (address): add using indirect addressing 0001 address [AC] + [[address]] AC JMP address 0010 address address PC Instruction Format for Simple Computer IR OP 4 AD 12 AD = address - Two phases to implement instructions: 1. -

The Central Processing Unit(CPU). the Brain of Any Computer System Is the CPU
Computer Fundamentals 1'stage Lec. (8 ) College of Computer Technology Dept.Information Networks The central processing unit(CPU). The brain of any computer system is the CPU. It controls the functioning of the other units and process the data. The CPU is sometimes called the processor, or in the personal computer field called “microprocessor”. It is a single integrated circuit that contains all the electronics needed to execute a program. The processor calculates (add, multiplies and so on), performs logical operations (compares numbers and make decisions), and controls the transfer of data among devices. The processor acts as the controller of all actions or services provided by the system. Processor actions are synchronized to its clock input. A clock signal consists of clock cycles. The time to complete a clock cycle is called the clock period. Normally, we use the clock frequency, which is the inverse of the clock period, to specify the clock. The clock frequency is measured in Hertz, which represents one cycle/second. Hertz is abbreviated as Hz. Usually, we use mega Hertz (MHz) and giga Hertz (GHz) as in 1.8 GHz Pentium. The processor can be thought of as executing the following cycle forever: 1. Fetch an instruction from the memory, 2. Decode the instruction (i.e., determine the instruction type), 3. Execute the instruction (i.e., perform the action specified by the instruction). Execution of an instruction involves fetching any required operands, performing the specified operation, and writing the results back. This process is often referred to as the fetch- execute cycle, or simply the execution cycle. -

Cross Architectural Power Modelling
Cross Architectural Power Modelling Kai Chen1, Peter Kilpatrick1, Dimitrios S. Nikolopoulos2, and Blesson Varghese1 1Queen’s University Belfast, UK; 2Virginia Tech, USA E-mail: [email protected]; [email protected]; [email protected]; [email protected] Abstract—Existing power modelling research focuses on the processor are extensively explored using a cumbersome trial model rather than the process for developing models. An auto- and error approach after which a suitable few are selected [7]. mated power modelling process that can be deployed on different Such an approach does not easily scale for various processor processors for developing power models with high accuracy is developed. For this, (i) an automated hardware performance architectures since a different set of hardware counters will be counter selection method that selects counters best correlated to required to model power for each processor. power on both ARM and Intel processors, (ii) a noise filter based Currently, there is little research that develops automated on clustering that can reduce the mean error in power models, and (iii) a two stage power model that surmounts challenges in methods for selecting hardware counters to capture proces- using existing power models across multiple architectures are sor power over multiple processor architectures. Automated proposed and developed. The key results are: (i) the automated methods are required for easily building power models for a hardware performance counter selection method achieves compa- collection of heterogeneous processors as seen in traditional rable selection to the manual method reported in the literature, data centers that host multiple generations of server proces- (ii) the noise filter reduces the mean error in power models by up to 55%, and (iii) the two stage power model can predict sors, or in emerging distributed computing environments like dynamic power with less than 8% error on both ARM and Intel fog/edge computing [8] and mobile cloud computing (in these processors, which is an improvement over classic models. -

Computer Organization and Architecture Designing for Performance Ninth Edition
COMPUTER ORGANIZATION AND ARCHITECTURE DESIGNING FOR PERFORMANCE NINTH EDITION William Stallings Boston Columbus Indianapolis New York San Francisco Upper Saddle River Amsterdam Cape Town Dubai London Madrid Milan Munich Paris Montréal Toronto Delhi Mexico City São Paulo Sydney Hong Kong Seoul Singapore Taipei Tokyo Editorial Director: Marcia Horton Designer: Bruce Kenselaar Executive Editor: Tracy Dunkelberger Manager, Visual Research: Karen Sanatar Associate Editor: Carole Snyder Manager, Rights and Permissions: Mike Joyce Director of Marketing: Patrice Jones Text Permission Coordinator: Jen Roach Marketing Manager: Yez Alayan Cover Art: Charles Bowman/Robert Harding Marketing Coordinator: Kathryn Ferranti Lead Media Project Manager: Daniel Sandin Marketing Assistant: Emma Snider Full-Service Project Management: Shiny Rajesh/ Director of Production: Vince O’Brien Integra Software Services Pvt. Ltd. Managing Editor: Jeff Holcomb Composition: Integra Software Services Pvt. Ltd. Production Project Manager: Kayla Smith-Tarbox Printer/Binder: Edward Brothers Production Editor: Pat Brown Cover Printer: Lehigh-Phoenix Color/Hagerstown Manufacturing Buyer: Pat Brown Text Font: Times Ten-Roman Creative Director: Jayne Conte Credits: Figure 2.14: reprinted with permission from The Computer Language Company, Inc. Figure 17.10: Buyya, Rajkumar, High-Performance Cluster Computing: Architectures and Systems, Vol I, 1st edition, ©1999. Reprinted and Electronically reproduced by permission of Pearson Education, Inc. Upper Saddle River, New Jersey, Figure 17.11: Reprinted with permission from Ethernet Alliance. Credits and acknowledgments borrowed from other sources and reproduced, with permission, in this textbook appear on the appropriate page within text. Copyright © 2013, 2010, 2006 by Pearson Education, Inc., publishing as Prentice Hall. All rights reserved. Manufactured in the United States of America. -

The Intel Microprocessors: Architecture, Programming and Interfacing Introduction to the Microprocessor and Computer
Microprocessors (0630371) Fall 2010/2011 – Lecture Notes # 1 The Intel Microprocessors: Architecture, Programming and Interfacing Introduction to the Microprocessor and computer Outline of the Lecture Evolution of programming languages. Microcomputer Architecture. Instruction Execution Cycle. Evolution of programming languages: Machine language - the programmer had to remember the machine codes for various operations, and had to remember the locations of the data in the main memory like: 0101 0011 0111… Assembly Language - an instruction is an easy –to- remember form called a mnemonic code . Example: Assembly Language Machine Language Load 100100 ADD 100101 SUB 100011 We need a program called an assembler that translates the assembly language instructions into machine language. High-level languages Fortran, Cobol, Pascal, C++, C# and java. We need a compiler to translate instructions written in high-level languages into machine code. Microprocessor-based system (Micro computer) Architecture Data Bus, I/O bus Memory Storage I/O I/O Registers Unit Device Device Central Processing Unit #1 #2 (CPU ) ALU CU Clock Control Unit Address Bus The figure shows the main components of a microprocessor-based system: CPU- Central Processing Unit , where calculations and logic operations are done. CPU contains registers , a high-frequency clock , a control unit ( CU ) and an arithmetic logic unit ( ALU ). o Clock : synchronizes the internal operations of the CPU with other system components using clock pulsing at a constant rate (the basic unit of time for machine instructions is a machine cycle or clock cycle) One cycle A machine instruction requires at least one clock cycle some instruction require 50 clocks. o Control Unit (CU) - generate the needed control signals to coordinate the sequencing of steps involved in executing machine instructions: (fetches data and instructions and decodes addresses for the ALU). -

Introduction to the Intel® Nios® II Soft Processor
Introduction to the Intel® Nios® II Soft Processor For Quartus® Prime 18.1 1 Introduction This tutorial presents an introduction the Intel® Nios® II processor, which is a soft processor that can be instantiated on an Intel FPGA device. It describes the basic architecture of Nios II and its instruction set. The Nios II processor and its associated memory and peripheral components are easily instantiated by using Intel’s SOPC Builder or Platform Designer tool in conjunction with the Quartus® Prime software. A full description of the Nios II processor is provided in the Nios II Processor Reference Handbook, which is available in the literature section of the Intel web site. Introductions to the SOPC Builder and Platform Designer tools are given in the tutorials Introduction to the Intel SOPC Builder and Introduction to the Intel Platform Designer Tool, respectively. Both can be found in the University Program section of the web site. Contents: • Nios II System • Overview of Nios II Processor Features • Register Structure • Accessing Memory and I/O Devices • Addressing • Instruction Set • Assembler Directives • Example Program • Exception Processing • Cache Memory • Tightly Coupled Memory Intel Corporation - FPGA University Program 1 March 2019 ® ® INTRODUCTION TO THE INTEL NIOS II SOFT PROCESSOR For Quartus® Prime 18.1 2 Background Intel’s Nios II is a soft processor, defined in a hardware description language, which can be implemented in Intel’s FPGA devices by using the Quartus Prime CAD system. This tutorial provides a basic introduction to the Nios II processor, intended for a user who wishes to implement a Nios II based system on an Intel Development and Education board. -
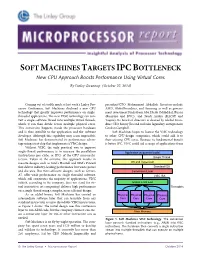
Soft Machines Targets Ipcbottleneck
SOFT MACHINES TARGETS IPC BOTTLENECK New CPU Approach Boosts Performance Using Virtual Cores By Linley Gwennap (October 27, 2014) ................................................................................................................... Coming out of stealth mode at last week’s Linley Pro- president/CTO Mohammad Abdallah. Investors include cessor Conference, Soft Machines disclosed a new CPU AMD, GlobalFoundries, and Samsung as well as govern- technology that greatly improves performance on single- ment investment funds from Abu Dhabi (Mubdala), Russia threaded applications. The new VISC technology can con- (Rusnano and RVC), and Saudi Arabia (KACST and vert a single software thread into multiple virtual threads, Taqnia). Its board of directors is chaired by Global Foun- which it can then divide across multiple physical cores. dries CEO Sanjay Jha and includes legendary entrepreneur This conversion happens inside the processor hardware Gordon Campbell. and is thus invisible to the application and the software Soft Machines hopes to license the VISC technology developer. Although this capability may seem impossible, to other CPU-design companies, which could add it to Soft Machines has demonstrated its performance advan- their existing CPU cores. Because its fundamental benefit tage using a test chip that implements a VISC design. is better IPC, VISC could aid a range of applications from Without VISC, the only practical way to improve single-thread performance is to increase the parallelism Application (sequential code) (instructions per cycle, or IPC) of the CPU microarchi- Single Thread tecture. Taken to the extreme, this approach results in massive designs such as Intel’s Haswell and IBM’s Power8 OS and Hypervisor that deliver industry-leading performance but waste power Standard ISA and die area.