Basic DC Motor Circuits
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Using Rctime to Measure Resistance
Basic Express Application Note Using RCtime to Measure Resistance Introduction One common use for I/O pins is to measure the analog value of a variable resistance. Although a built-in ADC (Analog to Digital Converter) is perhaps the easiest way to do this, it is also possible to use a digital I/O pin. This can be useful in cases where you don't have enough ADC channels, or if a particular processor doesn't have ADC capability. Procedure RCtime BasicX provides a special procedure called RCtime for this purpose. RCtime measures the time it takes for a pin to change state to a defined value. By connecting a fixed capacitor and a variable resistor in an RC circuit, you can use an I/O pin to measure the value of the variable resistor, which might be a device such as a potentiometer or thermistor. There are two common ways to wire an RCtime system. The first is to tie the variable resistor to ground. Figure 1 shows this configuration. The advantage here is less chance of damage from static electricity: Figure 1 Figure 2 The second configuration is shown in Figure 2. Here we use the opposite connection, where the capacitor C is tied to ground and the variable resistor RV is tied to 5 volts: In both circuits resistor R1 is there to protect the BasicX chip's output driver from driving too much current when charging the capacitor. To take a sample, the capacitor is first discharged by taking the pin to the correct state. In the case of Figure 1, the pin needs to be taken high (+5 V) to produce essentially 0 volts across the capacitor, which causes it to discharge. -

Chapter 7: AC Transistor Amplifiers
Chapter 7: Transistors, part 2 Chapter 7: AC Transistor Amplifiers The transistor amplifiers that we studied in the last chapter have some serious problems for use in AC signals. Their most serious shortcoming is that there is a “dead region” where small signals do not turn on the transistor. So, if your signal is smaller than 0.6 V, or if it is negative, the transistor does not conduct and the amplifier does not work. Design goals for an AC amplifier Before moving on to making a better AC amplifier, let’s define some useful terms. We define the output range to be the range of possible output voltages. We refer to the maximum and minimum output voltages as the rail voltages and the output swing is the difference between the rail voltages. The input range is the range of input voltages that produce outputs which are not at either rail voltage. Our goal in designing an AC amplifier is to get an input range and output range which is symmetric around zero and ensure that there is not a dead region. To do this we need make sure that the transistor is in conduction for all of our input range. How does this work? We do it by adding an offset voltage to the input to make sure the voltage presented to the transistor’s base with no input signal, the resting or quiescent voltage , is well above ground. In lab 6, the function generator provided the offset, in this chapter we will show how to design an amplifier which provides its own offset. -

Memristor-The Future of Artificial Intelligence L.Kavinmathi, C.Gayathri, K.Kumutha Priya
International Journal of Scientific & Engineering Research, Volume 5, Issue 4, April-2014 358 ISSN 2229-5518 Memristor-The Future of Artificial Intelligence L.kavinmathi, C.Gayathri, K.Kumutha priya Abstract- Due to increasing demand on miniaturization and low power consumption, Memristor came into existence. Our design exploration is Reconfigurable Threshold Logic Gates based Programmable Analog Circuits using Memristor. Thus a variety of linearly separable and non- linearly separable logic functions such as AND, OR, NAND, NOR, XOR, XNOR have been realized using Threshold logic gate using Memristor. The functionality can be changed between these operations just by varying the resistance of the Memristor. Based on this Reconfigurable TLG, various Programmable Analog circuits can be built using Memristor. As an example of our approach, we have built Programmable analog Gain amplifier demonstrating Memristor-based programming of Threshold, Gain and Frequency. As our idea consisting of Programmable circuit design, in which low voltages are applied to Memristor during their operation as analog circuit element and high voltages are used to program the Memristor’s states. In these circuits the role of memristor is played by Memristor Emulator developed by us using FPGA. Reconfigurable is the option we are providing with the present system, so that the resistance ranges are varied by preprogram too. Index Terms— Memristor, TLG-threshold logic gates, Programmable Analog Circuits, FPGA-field programmable gate array, MTL- memristor threshold logic, CTL-capacitor Threshold logic, LUT- look up table. —————————— ( —————————— 1 INTRODUCTION CCORDING to Chua’s [founder of Memristor] definition, 9444163588. E-mail: [email protected] the internal state of an ideal Memristor depends on the • L.kavinmathi is currently pursuing bachelors degree program in electronics A and communication engineering in tagore engineering college under Anna integral of the voltage or current over time. -

Lab 1: the Bipolar Junction Transistor (BJT): DC Characterization
Lab 1: The Bipolar Junction Transistor (BJT): DC Characterization Electronics II Contents Introduction 2 Day 1: BJT DC Characterization 2 Background . 2 BJT Operation Regions . 2 (i) Saturation Region . 4 (ii) Active Region . 4 (iii) Cutoff Region . 5 Part 1: Diode-Like Behavior of BJT Junctions, and BJT Type 6 Experiment . 6 Creating Your Own File . 6 Report..................................................... 8 Part 2: BJT IC vs. VCE Characteristic Curves - Point by Point Plotting 8 Prelab . 8 Experiment . 8 Creating Your Own File . 8 Parameter Sweep . 9 Report..................................................... 10 Part 3: The Current Mirror 11 Experiment . 12 Simulation . 12 Checkout . 12 Report..................................................... 13 1 ELEC 3509 Electronics II Lab 1 Introduction When designing a circuit, it is important to know the properties of the devices that you will be using. This lab will look at obtaining important device parameters from a BJT. Although many of these can be obtained from the data sheet, data sheets may not always include the information we want. Even if they do, it is also useful to perform our own tests and compare the results. This process is called device characterization. In addition, the tests you will be performing will help you get some experience working with your tools so you don't waste time fumbling around with them in future labs. In Day 1, you will be looking at the DC characteristics of your transistor. This will give you an idea of what the I-V curves look like, and how you would measure them. You will also have to build and test a current mirror, which should give you an idea of how they work and where their limitations are. -
AN-MISC-032 Date Issued: 5/24/16 Revision: REV
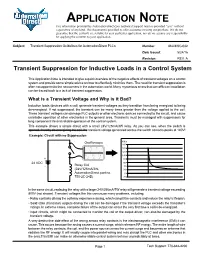
APPLICATION NOTE This information provided by Automationdirect.com Technical Support Team is provided “as is” without a guarantee of any kind. This document is provided to offer assistance in using our products. We do not guarantee that the contents are suitable for your particular application, nor do we assume any responsibility for applying the contents to your application. Subject: Transient Suppression Guidelines for AutomationDirect PLCs Number: AN-MISC-032 Date Issued: 5/24/16 Revision: REV. A Transient Suppression for Inductive Loads in a Control System This Application Note is intended to give a quick overview of the negative effects of transient voltages on a control system and provide some simple advice on how to effectively minimize them. The need for transient suppression is often not apparent to the newcomers in the automation world. Many mysterious errors that can afflict an installation can be traced back to a lack of transient suppression. What is a Transient Voltage and Why is it Bad? Inductive loads (devices with a coil) generate transient voltages as they transition from being energized to being de-energized. If not suppressed, the transient can be many times greater than the voltage applied to the coil. These transient voltages can damage PLC outputs or other electronic devices connected to the circuit, and cause unreliable operation of other electronics in the general area. Transients must be managed with suppressors for long component life and reliable operation of the control system. This example shows a simple circuit with a small 24V/125mA/3W relay. As you can see, when the switch is opened, thereby de-energizing the coil, the transient voltage generated across the switch contacts peaks at 140V! Example: Circuit with no Suppression Oscilloscope Volts 160 140 120 100 + 80 24 VDC 60 - Relay Coil 40 (24V/125mA/3W, 20 AutomationDirect part no. -

Ltspice Tutorial Part 4- Intermediate Circuits
Sim Lab 8 P art 2 – E fficiency R evisited Prerequisites ● Please make sure you have completed the following: ○ LTspice tutorial part 1-4 Learn ing Objectives 1. Build circuits that control the motor speed with resistor network and with MOSFET usingLTSpice XVII. 2. By calculating the power efficiency of two speed control circuits, learn that the use of MOSFET in a speed control circuit can increase the power efficiency. Speed control by resist or network ● First, place the components as the following figure. For convenience, we use a resistor in series with an inductor to model the motor. Set the values of resistors, the inductor and the voltage source like the figure. Speed control by resist or network ● Next, connect the circuit as the following figure. We first connect the left three 100 Ω resistors to the circuit. Also, add a label net called “Vmotor_1” and place it right above R6. W e want to monitor the voltage across the motor in this way. ● At the same time, like what we did to a capacitor in previous labs, we also need to set initial conditions for an inductor. Click “Edit” -> Spice Directive -> set “.ic i(L1) = 0”. Speed control by resist or network ● Next, set the simulation condition as the left figure. We are ready to start the simulation. ● The reason to set the stop time as 0.1ms is to observe the change of Vmotor_1 through time from a transient state to steady state. Motor Model Speed control by resist or network ● Run the simulation. ● Plot Vmotor_1 and the current flowing through R6. -

Digital Potentiometers Design Guide
Analog and Interface Products Digital Potentiometers Design Guide www.microchip.com/analog Digital Potentiometer Solutions Microchip’s Family of Digital Potentiometers Microchip offers a wide range of devices that allow you to select the best fit for your application needs. Some of the selection options include: ■ End-to-end resistance (RAB) values ■ Resistor network confi gurations • 2.1 kΩ to 100 kΩ (typical) • Potentiometer (voltage divider) ■ Resolution • Rheostat (variable resistor) • 6-bit (64 steps) ■ Single, dual and quad potentiometer options • 7-bit (128/129 steps) ■ Different package options • 8-bit (256/257 steps) ■ Special features ■ Serial interfaces • Shutdown mode • Up/down • WiperLock™ technology • SPI ■ Low-power options • I2C ■ Low-voltage options (1.8V) ■ Memory types ■ High-voltage options (36V or ±18V) • Volatile • Non-volatile (EEPROM) Microchip offers digital potentiometer devices with typical end-to-end resistances of 2.1 kΩ, 5 kΩ, 10 kΩ, 50 kΩ and 100 kΩ. These devices are available in 6, 7 or 8 bits of resolution. The serial interface options allow you to easily integrate the device into your application. For some applications, the simple up/down interface will be adequate. Higher-resolution devices (7-bit, 8-bit) often require direct read/write to the wiper register. This is supported with SPI or I2C interfaces. SPI is simpler to implement, but I2C uses only two signals (pins) and can support multiple devices on the serial bus without additional pins. Microchip offers both volatile and non-volatile (EEPROM) devices, allowing you the flexibility to optimize your system design. The integrated EEPROM option allows you to save digital potentiometer settings at power-down and restore to its original value and power-up. -

Conductive Plastic and Cermet MODPOT Panel Potentiometers
Series 70 Custom Potentiometer Designer Guide .015 [0.38mm] 1/8 [3.18mm] .250 .055 [6.35mm] [1.47mm] 36 ROUTE 10, STE 6 • EAST HANOVER • NEW JERSEY Phone 973-887-2550 • T oll Free 1-800-631-8083 • Fax 973-887-1940 Internet http://www • 07936 .potentiometers.com POT PROTOTYPES PRONTO! Dual Potentiometer, Dual Rotary Switch, Single Potentiometer, Single Rotary Switch, Single Potentiometer, Dual Potentiometer, Single Flatted 1/8” Shaft, Solder Lugs Single Slotted 1/4” Shaft, Solder Lugs Single 1/4” Shaft, Solder Lugs Dual Shaft, Solder Lugs Dual Potentiometer, Single Potentiometer, Triple Potentiometer, Quad Potentiometer, Single 1/4” Shaft, PC Pins Single Slotted 1/4” Shaft, PC Pins Single 1/8” Shaft, PC Pins Single 1/4” Shaft, Solder Lugs Now almost any special combination potentiometer you specify can be manufactured and shipped soon after your order is received. Since Clarosystem and Mod Pot potentiometers are modular in construction, we can produce prototype quantities of 1/2 or 5/8 inch square, conductive plastic, cermet, or hot molded carbon pots for you in just a few hours . and even production quantities in a matter of days with our VIP (Very Important Potentiometer) service! Over one billion combinations of single, dual, triple, quad arrangements, push-pull or rotary switches and hundreds of shaft terminal variations can be produced. If you need a potentiometer and you need it fast, call our product manager or fax us your requirements using the WHY WAIT? Custom Potentiometer Order Forms included in this catalog. 36 Route 10, STE 6 East Hanover, NJ 07936-0436 Phone 973-887-2550 Toll Free 1-800-631-8083 FAX 973-887-1940 http://www.potentiometers.com Series 70, 72 Hot-Molded Carbon*, Conductive Plastic (CP), and Cermet Panel Potentiometers Unmatched Flexibility The MOD POT® Family includes: Series 70 – Metal or Plastic Shaft – Metal Bushing. -

AN-1206 Application Note
AN-1206 APPLICATION NOTE One Technology Way • P. O. Box 9106 • Norwood, MA 02062-9106, U.S.A. • Tel: 781.329.4700 • Fax: 781.461.3113 • www.analog.com Variable Gain Inverting Amplifier Using the AD5292 Digital Potentiometer and the OP184 Op Amp VDD CIRCUIT FUNCTION AND BENEFITS R3 1kΩ +15V/+30V This circuit provides a low cost, high voltage, variable gain V+ OP184 VOUT inverting amplifier using the AD5292 digital potentiometer V V– IN –15V/GND R2 in conjunction with the OP184 operational amplifier. 4.99kΩ ± 1% C1 V 10pF SS The circuit offers 1024 different gains, controllable through an SPI-compatible serial digital interface. The ±1% resistor tolerance VDD R +15V/+30V AW performance of the AD5292 provides low gain error over the RAB 20kΩ full resistor range, as shown in Figure 2. AD5292 SERIAL INTERFACE VSS The circuit supports input and output rail to rail for both single –15V/GND 08426-001 supply operation at +30 V and dual supply operation at ±15 V; Figure 1. Variable Gain Inverting Amplifier (Simplified Schematic: and is capable of delivering up to ±6.5 mA output current. Decoupling and All Connections Not Shown) In addition, the AD5292 has an internal 20-times programmable The circuit gain equation is memory that allows a customized gain setting at power-up. The (1024 − D)× RAB circuit provides accuracy, low noise, low THD, and is well suited G = − 1024 (3) for signal instrumentation conditioning. R2 CIRCUIT DESCRIPTION where D is the code loaded in the digital potentiometer. Table 1. Devices Connected/Referenced When the circuit input is an ac signal, the parasitic capacitances Product Description of the digital potentiometer can cause undesirable oscillation in AD5292 10-bit, 1% resistor tolerance digital potentiometer the output. -
The Transistor, Fundamental Component of Integrated Circuits
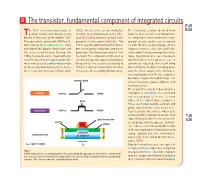
D The transistor, fundamental component of integrated circuits he first transistor was made in (SiO2), which serves as an insulator. The transistor, a name derived from Tgermanium by John Bardeen and In 1958, Jack Kilby invented the inte- transfer and resistor, is a fundamen- Walter H. Brattain, in December 1947. grated circuit by manufacturing 5 com- tal component of microelectronic inte- The year after, along with William B. ponents on the same substrate. The grated circuits, and is set to remain Shockley at Bell Laboratories, they 1970s saw the advent of the first micro- so with the necessary changes at the developed the bipolar transistor and processor, produced by Intel and incor- nanoelectronics scale: also well-sui- the associated theory. During the porating 2,250 transistors, and the first ted to amplification, among other func- 1950s, transistors were made with sili- memory. The complexity of integrated tions, it performs one essential basic con (Si), which to this day remains the circuits has grown exponentially (dou- function which is to open or close a most widely-used semiconductor due bling every 2 to 3 years according to current as required, like a switching to the exceptional quality of the inter- “Moore's law”) as transistors continue device (Figure). Its basic working prin- face created by silicon and silicon oxide to become increasingly miniaturized. ciple therefore applies directly to pro- cessing binary code (0, the current is blocked, 1 it goes through) in logic cir- control gate cuits (inverters, gates, adders, and memory cells). The transistor, which is based on the switch source drain transport of electrons in a solid and not in a vacuum, as in the electron gate tubes of the old triodes, comprises three electrodes (anode, cathode and gate), two of which serve as an elec- transistor source drain tron reservoir: the source, which acts as the emitter filament of an electron gate insulator tube, the drain, which acts as the col- source lector plate, with the gate as “control- gate drain ler”. -
Fundamentals of MOSFET and IGBT Gate Driver Circuits
Application Report SLUA618A–March 2017–Revised October 2018 Fundamentals of MOSFET and IGBT Gate Driver Circuits Laszlo Balogh ABSTRACT The main purpose of this application report is to demonstrate a systematic approach to design high performance gate drive circuits for high speed switching applications. It is an informative collection of topics offering a “one-stop-shopping” to solve the most common design challenges. Therefore, it should be of interest to power electronics engineers at all levels of experience. The most popular circuit solutions and their performance are analyzed, including the effect of parasitic components, transient and extreme operating conditions. The discussion builds from simple to more complex problems starting with an overview of MOSFET technology and switching operation. Design procedure for ground referenced and high side gate drive circuits, AC coupled and transformer isolated solutions are described in great details. A special section deals with the gate drive requirements of the MOSFETs in synchronous rectifier applications. For more information, see the Overview for MOSFET and IGBT Gate Drivers product page. Several, step-by-step numerical design examples complement the application report. This document is also available in Chinese: MOSFET 和 IGBT 栅极驱动器电路的基本原理 Contents 1 Introduction ................................................................................................................... 2 2 MOSFET Technology ...................................................................................................... -

Power MOSFET Basics by Vrej Barkhordarian, International Rectifier, El Segundo, Ca
Power MOSFET Basics By Vrej Barkhordarian, International Rectifier, El Segundo, Ca. Breakdown Voltage......................................... 5 On-resistance.................................................. 6 Transconductance............................................ 6 Threshold Voltage........................................... 7 Diode Forward Voltage.................................. 7 Power Dissipation........................................... 7 Dynamic Characteristics................................ 8 Gate Charge.................................................... 10 dV/dt Capability............................................... 11 www.irf.com Power MOSFET Basics Vrej Barkhordarian, International Rectifier, El Segundo, Ca. Discrete power MOSFETs Source Field Gate Gate Drain employ semiconductor Contact Oxide Oxide Metallization Contact processing techniques that are similar to those of today's VLSI circuits, although the device geometry, voltage and current n* Drain levels are significantly different n* Source t from the design used in VLSI ox devices. The metal oxide semiconductor field effect p-Substrate transistor (MOSFET) is based on the original field-effect Channel l transistor introduced in the 70s. Figure 1 shows the device schematic, transfer (a) characteristics and device symbol for a MOSFET. The ID invention of the power MOSFET was partly driven by the limitations of bipolar power junction transistors (BJTs) which, until recently, was the device of choice in power electronics applications. 0 0 V V Although it is not possible to T GS define absolutely the operating (b) boundaries of a power device, we will loosely refer to the I power device as any device D that can switch at least 1A. D The bipolar power transistor is a current controlled device. A SB (Channel or Substrate) large base drive current as G high as one-fifth of the collector current is required to S keep the device in the ON (c) state. Figure 1. Power MOSFET (a) Schematic, (b) Transfer Characteristics, (c) Also, higher reverse base drive Device Symbol.