Development and Definition of a Cubesat Demonstrator for a Water Propulsion System
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Space Industry Bulletin July 2019
VOLUME 2 • ISSUE 7 www.spaceindustrybulletin.com Space Industry Bulletin Market analysis and business intelligence for the space community Commercialising LEO will need destinations beyond the ISS ommercialisation of low investors. And it will depend on and a few private companies Earth orbit will require having destinations beyond just does not make a sustainable in - Cnew models for public- the International Space Station. frastructure. So how do we build private partnership, and it will be For almost two decades, the this community? built on a technology infras- ISS has been the sole hub for Kerry Timmons, LEO com - tructure that will include the commercialisation activities, pro - mercial programme manage - CONTENTS likes of robotics and machine viding unique access to research ment lead at Lockheed Martin learning. and development in a micro- Space, said: “It requires collab - Industry news 2 But commercial success will gravity environment. oration. It needs ‘old space’ and l Virgin Galactic to go public hinge on an infrastructure that Doug Comstock, deputy chief ‘new space’ working in partner - following merger “buys down the risk” for financial officer for integration ship. It needs the commercial l Launch of balloon marks the commercial partners and at NASA, said: “The ISS has 14 market to be energised to bring beginning of a new space era different facilities built by 11 dif - their money and ideas to space.” l Innovation loans offer a share of ferent companies. We don’t want When we talk about commer - £10m funding a gap in capability for human cialising LEO, it’s important to l Galileo outage helps build the access to LEO.” recognise that space is not the case for sovereign UK GNSS Along with destinations, suc - first frontier, and also that Earth l OneWeb takes sustainability into cessful commercialisation of LEO imagery is an industry success orbit and calls on the wider industry will depend on a community, story. -
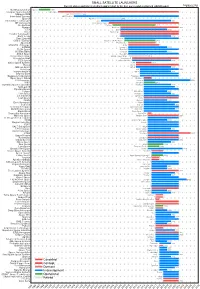
Small Satellite Launchers
SMALL SATELLITE LAUNCHERS NewSpace Index 2020/04/20 Current status and time from development start to the first successful or planned orbital launch NEWSPACE.IM Northrop Grumman Pegasus 1990 Scorpius Space Launch Demi-Sprite ? Makeyev OKB Shtil 1998 Interorbital Systems NEPTUNE N1 ? SpaceX Falcon 1e 2008 Interstellar Technologies Zero 2021 MT Aerospace MTA, WARR, Daneo ? Rocket Lab Electron 2017 Nammo North Star 2020 CTA VLM 2020 Acrux Montenegro ? Frontier Astronautics ? ? Earth to Sky ? 2021 Zero 2 Infinity Bloostar ? CASIC / ExPace Kuaizhou-1A (Fei Tian 1) 2017 SpaceLS Prometheus-1 ? MISHAAL Aerospace M-OV ? CONAE Tronador II 2020 TLON Space Aventura I ? Rocketcrafters Intrepid-1 2020 ARCA Space Haas 2CA ? Aerojet Rocketdyne SPARK / Super Strypi 2015 Generation Orbit GoLauncher 2 ? PLD Space Miura 5 (Arion 2) 2021 Swiss Space Systems SOAR 2018 Heliaq ALV-2 ? Gilmour Space Eris-S 2021 Roketsan UFS 2023 Independence-X DNLV 2021 Beyond Earth ? ? Bagaveev Corporation Bagaveev ? Open Space Orbital Neutrino I ? LIA Aerospace Procyon 2026 JAXA SS-520-4 2017 Swedish Space Corporation Rainbow 2021 SpinLaunch ? 2022 Pipeline2Space ? ? Perigee Blue Whale 2020 Link Space New Line 1 2021 Lin Industrial Taymyr-1A ? Leaf Space Primo ? Firefly 2020 Exos Aerospace Jaguar ? Cubecab Cab-3A 2022 Celestia Aerospace Space Arrow CM ? bluShift Aerospace Red Dwarf 2022 Black Arrow Black Arrow 2 ? Tranquility Aerospace Devon Two ? Masterra Space MINSAT-2000 2021 LEO Launcher & Logistics ? ? ISRO SSLV (PSLV Light) 2020 Wagner Industries Konshu ? VSAT ? ? VALT -

SHOW DAILY SHOW Aug
Aug. 8, 2019 • Visit us at 239T DAY 3 SHOW DAILY OFFICIAL SHOW DAILY OF THE 33RD AIAA/USU CONFERENCE ON SMALL SATELLITES NASA seeking proposals for cubesats on second SLS launch ASA is soliciting proposals to fly cubesats on the second flight of its Space Launch N System, even as those cubesats chosen for the first SLS launch patiently await their ride. At an agency town hall meeting during the Conference on Small Satellites Aug. 5, Renee Cox, deputy manager for SLS payload integration at NASA’s Marshall Space Flight Center, said the agency was planning to fly cubesats on Artemis 2, the second flight of the SLS, tentatively sched- uled for 2022. “Recently we achieved a level of maturity that has allowed us to identify performance margin, so that means we get to fly cubesats,” she said of the decision to add cubesats to the mission. NASA announced in 2016 it would fly 13 cubesats on the first SLS mission, originally called Explora- tion Mission (EM) 1 and renamed Artemis 1 earlier this year. Those satellites include NASA-funded science and technology demonstration missions, payloads from international partners and compet- itors in the Cube Quest Challenge competition. As with the Artemis 1 mission, the cubesats flying on Artemis 2 will be mounted on the inside of a stage adapter ring between the SLS upper stage and the Orion spacecraft, and will be de- Renee Cox, deputy manager for SLS payload integration, at SmallSat on Wednesday holds a model of an adapter ployed after Orion separates. Unlike Artemis 1, ring that can accomodate six-unit and 12-unit cubesats between the SLS upper stage and Orion spacecraft. -

MIT Japan Program Working Paper 01.10 the GLOBAL COMMERCIAL
MIT Japan Program Working Paper 01.10 THE GLOBAL COMMERCIAL SPACE LAUNCH INDUSTRY: JAPAN IN COMPARATIVE PERSPECTIVE Saadia M. Pekkanen Assistant Professor Department of Political Science Middlebury College Middlebury, VT 05753 [email protected] I am grateful to Marco Caceres, Senior Analyst and Director of Space Studies, Teal Group Corporation; Mark Coleman, Chemical Propulsion Information Agency (CPIA), Johns Hopkins University; and Takashi Ishii, General Manager, Space Division, The Society of Japanese Aerospace Companies (SJAC), Tokyo, for providing basic information concerning launch vehicles. I also thank Richard Samuels and Robert Pekkanen for their encouragement and comments. Finally, I thank Kartik Raj for his excellent research assistance. Financial suppport for the Japan portion of this project was provided graciously through a Postdoctoral Fellowship at the Harvard Academy of International and Area Studies. MIT Japan Program Working Paper Series 01.10 Center for International Studies Massachusetts Institute of Technology Room E38-7th Floor Cambridge, MA 02139 Phone: 617-252-1483 Fax: 617-258-7432 Date of Publication: July 16, 2001 © MIT Japan Program Introduction Japan has been seriously attempting to break into the commercial space launch vehicles industry since at least the mid 1970s. Yet very little is known about this story, and about the politics and perceptions that are continuing to drive Japanese efforts despite many outright failures in the indigenization of the industry. This story, therefore, is important not just because of the widespread economic and technological merits of the space launch vehicles sector which are considerable. It is also important because it speaks directly to the ongoing debates about the Japanese developmental state and, contrary to the new wisdom in light of Japan's recession, the continuation of its high technology policy as a whole. -

ESPI Insights Space Sector Watch
ESPI Insights Space Sector Watch Issue 12 January 2021 THIS MONTH IN THE SPACE SECTOR… 2021 AND NEW EUROPEAN SPACE AMBITIONS ............................................................................. 1 POLICY & PROGRAMMES .............................................................................................................. 2 Josef Aschbacher elected new ESA DG .................................................................................................. 2 BREXIT deal and future UK participation in EU space programmes..................................................... 2 French space sector to receive €500 million investment boost ........................................................... 2 Multiple new U.S. Space Policies released ............................................................................................. 3 Updates on Artemis Accords: new MoU with Brazil ............................................................................... 4 Jim Bridenstine bids farewell to NASA as the agency awaits new administrator nomination.......... 4 Phil Evans becomes new EUMETSAT DG ............................................................................................... 4 NASA and FAA sign MoU on Commercial Space Activities .................................................................. 4 Congress approves Omnibus spending bill for Fiscal Year 2021 ......................................................... 4 Hayabusa-2 capsule returns Ryugu asteroid sample to Earth ............................................................. -

Facts & Figures
OVERVIEW A specialised strategic sector _facts & figures 23rd edition, June 2019 Te European space industry in 2018 _f&f // 23rd edition, June 2019 // The European space industry in 2018 02 CONTENTS ABOUT EUROSPACE 01 OUTPUT OF THE EUROPEAN SPACE INDUSTRY IN 2018 35 FOREWORD 02 European spacecraft deliveries to launch 35 European spacecraft launched in 2018 35 OVERVIEW 03 Correlation between spacecraft mass A specialised strategic sector 03 at launch and industry revenues 37 Markets and customers 04 Ariane and VEGA launches 37 MAIN INDICATORS 06 METHODOLOGY 39 Long series indicators 07 Perimeter of the survey 39 Data Collection 39 SECTOR DEMOGRAPHICS 09 Consolidation Model 39 Industry employment - The need for consolidation 39 age and gender distribution 09 Methodological update in 2010 39 Industry employment - Qualification structure 09 Industry employment - distribution by country 10 DEFINITIONS 40 Industry employment - distribution by company 12 Space systems and related products Employment in large groups 12 considered in the survey 40 SMEs in the space sector 12 Launcher systems 40 Spacecraft/satellite systems 40 FINAL SALES BY MARKET SEGMENT 13 Ground Segment (and related services) 40 Overview: European sales vs. Export 13 Sector concentration: employment Overview - Public vs. Private customers 16 in space units, employment by unit and cumulated % 40 Customer details 17 Focus: SURVEY INFORMATION 41 European public/institutional customers 17 Eurospace economic model 41 Focus: The commercial market (private customers and exports) -

News Release
NEWS RELEASE TRISEPT SECURES DEDICATED RIDESHARE MISSION ABOARD ORBEX PRIME With the mission procurement complete, TriSept set to begin rideshare spacecraft selection and initiate integration process ahead of 2022 Orbex Prime launch from Scotland CHANTILLY, Virginia and FORRES, Scotland – January 14, 2020 – TriSept Corporation, a leading provider of launch integration, management and brokerage services for commercial and government missions, today announced it has procured a full mission aboard an Orbex Prime launch vehicle set to lift off in the fall of 2022 from the UK's first spaceport in Sutherland, Scotland. With its expansion into the UK space market already underway, TriSept is building a multiple spacecraft manifest for a dedicated rideshare mission aboard the reusable Orbex Prime small satellite launcher. TriSept is a long-time go-to launch integration provider in the US space market, enabling the launch of more than 200 satellites on 70 different missions aboard 20 different launch vehicles from 13 launch sites across the globe. TriSept announced last month it will have a full-time presence at the Harwell Space Campus in Oxford, England beginning this year. Designed and developed by UK-based Orbex, the Orbex Prime launch vehicle offers a payload capacity of 150kg to Sun Synchronous Orbit (SSO), ideally suited for a broad range of commercial, government and scientific missions lifting off from Europe. In December 2019, Orbex revealed the advanced engineering techniques and materials that it is using at its factory in Forres, Scotland, to create the next generation of renewably-fuelled European launch vehicles. The Orbex Prime, which is up to 30 percent lighter than other small launch vehicles, utilizes bio-propane, a clean-burning, renewable fuel that cuts carbon emissions by 90 percent compared to traditional hydrocarbon fuels. -

Path to the First Flight of the SL-OMV
SSC19-SI-02 Path to the First Flight of the SL-OMV Christopher Loghry Moog Inc, Space and Defense Group, Advanced Programs 21339 Nordhoff St, Chatsworth, CA 91311; 818-734-3445 [email protected] Marissa Stender Moog Inc, Space and Defense Group, Advanced Programs 16080 Table Mountain Parkway Suite 500, Golden, CO 80403; 720-557-3872 [email protected] ABSTRACT The growing number of dedicated small launch vehicles will lower the cost of space access in the coming years but many challenges remain in utilizing these for small payloads particularly CubeSat missions. Cubesats still have a similar number of concerns and obstacles as a secondary payload on a larger rocket as they do on a small rocket such as desired orbital location. Constellation phasing creates another challenge without using on-board propulsion or time consuming differential drag strategies. All of these create additional challenges for the mass/cost constrained CubeSat developer. Many of these challenges can be met through the use of a propulsive rideshare adapter or Small Launch Orbital Maneuvering Vehicle (SL-OMV). The SL-OMV is a low mass and low cost propulsive adapter that can be used to distribute CubeSat payloads (1U, 3U, 6U, 12U, and non-standard sizes) with different orbital parameters than the primary payload or each CubeSat with a different orbital destination. This is important for both Rideshare launches but single mission dedicated cluster launches. The SL-OMV can remain on orbit for a longer duration allowing for constellation phasing for payloads without propulsion. This can be used for “on demand” deployments that are useful across commercial, civil, and military space applications. -

The Future of the European Space Sector How to Leverage Europe’S Technological Leadership and Boost Investments for Space Ventures
The future of the European space sector How to leverage Europe’s technological leadership and boost investments for space ventures The future of the European space sector How to leverage Europe’s technological leadership and boost investments for space ventures Prepared for: The European Commission By: Innovation Finance Advisory in collaboration with the European Investment Advisory Hub, part of the European Investment Bank’s advisory services Authors: Alessandro de Concini, Jaroslav Toth Supervisor: Shiva Dustdar Contact: [email protected] Consultancy support: SpaceTec Partners © European Investment Bank, 2019. All rights reserved. All questions on rights and licensing should be addressed to [email protected] Disclaimer This Report should not be referred to as representing the views of the European Investment Bank (EIB), of the European Commission (EC) or of other European Union (EU) institutions and bodies. Any views expressed herein, including interpretation(s) of regulations, reflect the current views of the author(s), which do not necessarily correspond to the views of EIB, of the EC or of other EU institutions and bodies. Views expressed herein may differ from views set out in other documents, including similar research papers, published by the EIB, by the EC or by other EU institutions and bodies. Contents of this Report, including views expressed, are current at the date of publication set out above, and may change without notice. No representation or warranty, express or implied, is or will be made and no liability or responsibility is or will be accepted by EIB, by the EC or by other EU institutions and bodies in respect of the accuracy or completeness of the information contained herein and any such liability is expressly disclaimed. -

Espinsights the Global Space Activity Monitor
ESPInsights The Global Space Activity Monitor Issue 5 January-March 2020 CONTENTS FOCUS ..................................................................................................................... 1 The COVID-19 pandemic crisis: the point of view of space ...................................................... 1 SPACE POLICY AND PROGRAMMES .................................................................................... 3 EUROPE ................................................................................................................. 3 Lift-off for ESA Sun-exploring spacecraft ....................................................................... 3 ESA priorities for 2020 ............................................................................................. 3 ExoMars 2022 ........................................................................................................ 3 Airbus’ Bartolomeo Platform headed toward the ISS .......................................................... 3 A European Coordination Committee for the Lunar Gateway ................................................ 4 ESA awards contract to drill and analyse lunar subsoil ........................................................ 4 EU Commission invests in space .................................................................................. 4 Galileo’s Return Link Service is operational .................................................................... 4 Quality control contract on Earth Observation data .......................................................... -

Premier League Is the Uk No Longer a Tier 1 Military Power?
February 2019 February MICRO SPACE LAUNCH LAUNCH SPACE MICRO REVOLUTION CHINA RISING CHINA AIR SERVICES POST BREXIT? PREMIER LEAGUE PREMIER IS THE UK NO LONGER A TIER 1 POWER?MILITARY www.aerosociety.com AEROSPACE February 2019 Volume 46 Number 2 Royal Aeronautical Society Don’t forget to renew your membership subscription for 2019 Membership fees were due on the 1st January and any unpaid memberships will lapse on 31 March 2019 As per the Society’s Regulations, all How to renew: memberships will be suspended where a payment for an individual subscription has Online: Log in to your account on the Society’s not been received after three months of the website to pay at: due date. This excludes members paying their www.aerosociety.com/login annual subscriptions by Direct Debit in monthly instalments. If you do not have an account, you can register Your membership benefits include: online and pay your subscription straight away. ⚫ Your monthly subscription to AEROSPACE Telephone: Call the Subscriptions Department magazine on: ⚫ Use of your RAeS post nominals, as applicable +44 (0)20 7670 4315 / 4304 ⚫ Access to over 400 global events yearly Cheque: Cheques should be made payable to ⚫ Discounted rates for conferences the Royal Aeronautical Society and sent to the ⚫ Online publications including Society News, Subscriptions Department at No.4 Hamilton blogs and podcasts Place, London W1J 7BQ, UK. ⚫ Involvement with your local Branch BACS Transfer: Pay by Bank Transfer (or by BACS) into the Society’s bank account, quoting ⚫ Networking opportunities your name and membership number. Bank ⚫ Support gaining Professional Registration details: ⚫ Recognition of achievement through the Bank: HSBC plc Society’s Medals and Awards Sort Code: 40-05-22 ⚫ Opportunities for professional development Account No: 01564641 .. -

SMALL SATELLITE LAUNCHERS Cancelled Concept Dormant In
SMALL SATELLITE LAUNCHERS NewSpace Index 2020/03/09 Current status and time from development start to the first successful or planned orbital launch NEWSPACE.IM Northrop Grumman Pegasus 1990 Scorpius Space Launch Demi-Sprite ? Makeyev OKB Shtil 1998 Interorbital Systems NEPTUNE N1 ? SpaceX Falcon 1e 2008 Interstellar Technologies Zero 2021 MT Aerospace MTA, WARR, Daneo ? Rocket Lab Electron 2017 Nammo North Star 2020 CTA VLM 2020 Acrux Montenegro ? Frontier Astronautics ? ? Earth to Sky ? 2021 Zero 2 Infinity Bloostar ? CASIC / ExPace Fei Tian 1 / Kuaizhou-1A 2017 SpaceLS Prometheus-1 ? MISHAAL Aerospace M-OV ? CONAE Tronador II 2020 TLON Space Aventura I ? Rocketcrafters Intrepid-1 2020 ARCA Space Haas 2CA ? Aerojet Rocketdyne SPARK / Super Strypi 2015 Generation Orbit GoLauncher 2 ? PLD Space Miura 5 (Arion 2) 2021 Swiss Space Systems SOAR 2018 Heliaq ALV-2 ? Gilmour Space Eris-S 2021 Roketsan UFS 2023 Independence-X DNLV 2021 Beyond Earth ? ? Bagaveev Corporation Bagaveev ? Open Space Orbital Neutrino I ? LIA Aerospace Procyon 2026 JAXA SS-520-4 2017 Swedish Space Corporation Rainbow 2021 SpinLaunch ? 2022 Pipeline2Space ? ? Perigee Blue Whale 2020 Link Space New Line 1 2021 Lin Industrial Taymyr-1A ? Leaf Space Primo ? Firefly 2020 Exos Aerospace Jaguar ? Cubecab Cab-3A 2022 Celestia Aerospace Space Arrow CM ? bluShift Aerospace Red Dwarf 2022 Black Arrow Black Arrow 2 ? Tranquility Aerospace Devon Two ? Masterra Space MINSAT-2000 2021 LEO Launcher & Logistics ? ? ISRO SSLV (PSLV Light) 2020 Wagner Industries Konshu ? VSAT ? ? VALT