Wave Setup Over a Fringing Reef with Large Bottom Roughness
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Coral Reef Algae
Coral Reef Algae Peggy Fong and Valerie J. Paul Abstract Benthic macroalgae, or “seaweeds,” are key mem- 1 Importance of Coral Reef Algae bers of coral reef communities that provide vital ecological functions such as stabilization of reef structure, production Coral reefs are one of the most diverse and productive eco- of tropical sands, nutrient retention and recycling, primary systems on the planet, forming heterogeneous habitats that production, and trophic support. Macroalgae of an astonish- serve as important sources of primary production within ing range of diversity, abundance, and morphological form provide these equally diverse ecological functions. Marine tropical marine environments (Odum and Odum 1955; macroalgae are a functional rather than phylogenetic group Connell 1978). Coral reefs are located along the coastlines of comprised of members from two Kingdoms and at least over 100 countries and provide a variety of ecosystem goods four major Phyla. Structurally, coral reef macroalgae range and services. Reefs serve as a major food source for many from simple chains of prokaryotic cells to upright vine-like developing nations, provide barriers to high wave action that rockweeds with complex internal structures analogous to buffer coastlines and beaches from erosion, and supply an vascular plants. There is abundant evidence that the his- important revenue base for local economies through fishing torical state of coral reef algal communities was dominance and recreational activities (Odgen 1997). by encrusting and turf-forming macroalgae, yet over the Benthic algae are key members of coral reef communities last few decades upright and more fleshy macroalgae have (Fig. 1) that provide vital ecological functions such as stabili- proliferated across all areas and zones of reefs with increas- zation of reef structure, production of tropical sands, nutrient ing frequency and abundance. -

The Physical Environment in Coral Reefs of the Tayrona National Natural Park (Colombian Caribbean) in Response to Seasonal Upwelling*
Bol. Invest. Mar. Cost. 43 (1) 137-157 ISSN 0122-9761 Santa Marta, Colombia, 2014 THE PHYSICAL ENVIRONMENT IN CORAL REEFS OF THE TAYRONA NATIONAL NATURAL PARK (COLOMBIAN CARIBBEAN) IN RESPONSE TO SEASONAL UPWELLING* Elisa Bayraktarov1, 2, Martha L. Bastidas-Salamanca3 and Christian Wild1,4 1 Leibniz Center for Tropical Marine Ecology (ZMT), Coral Reef Ecology Group (CORE), Fahrenheitstraße 6, D-28359 Bremen, Germany. [email protected], [email protected] 2 Present address: The University of Queensland, Global Change Institute, Brisbane QLD 4072, Australia 3 Instituto de Investigaciones Marinas y Costeras (Invemar), Calle 25 No. 2-55 Playa Salguero, Santa Marta, Colombia. [email protected] 4 University of Bremen, Faculty of Biology and Chemistry (FB2), D-28359 Bremen, Germany ABSTRACT Coral reefs are subjected to physical changes in their surroundings including wind velocity, water temperature, and water currents that can affect ecological processes on different spatial and temporal scales. However, the dynamics of these physical variables in coral reef ecosystems are poorly understood. In this context, Tayrona National Natural Park (TNNP) in the Colombian Caribbean is an ideal study location because it contains coral reefs and is exposed to seasonal upwelling that strongly changes all key physical factors mentioned above. This study therefore investigated wind velocity and water temperature over two years, as well as water current velocity and direction for representative months of each season at a wind- and wave-exposed and a sheltered coral reef site in one exemplary bay of TNNP using meteorological data, temperature loggers, and an Acoustic Doppler Current Profiler (ADCP) in order to describe the spatiotemporal variations of the physical environment. -

The Contribution of Wind-Generated Waves to Coastal Sea-Level Changes
1 Surveys in Geophysics Archimer November 2011, Volume 40, Issue 6, Pages 1563-1601 https://doi.org/10.1007/s10712-019-09557-5 https://archimer.ifremer.fr https://archimer.ifremer.fr/doc/00509/62046/ The Contribution of Wind-Generated Waves to Coastal Sea-Level Changes Dodet Guillaume 1, *, Melet Angélique 2, Ardhuin Fabrice 6, Bertin Xavier 3, Idier Déborah 4, Almar Rafael 5 1 UMR 6253 LOPSCNRS-Ifremer-IRD-Univiversity of Brest BrestPlouzané, France 2 Mercator OceanRamonville Saint Agne, France 3 UMR 7266 LIENSs, CNRS - La Rochelle UniversityLa Rochelle, France 4 BRGMOrléans Cédex, France 5 UMR 5566 LEGOSToulouse Cédex 9, France *Corresponding author : Guillaume Dodet, email address : [email protected] Abstract : Surface gravity waves generated by winds are ubiquitous on our oceans and play a primordial role in the dynamics of the ocean–land–atmosphere interfaces. In particular, wind-generated waves cause fluctuations of the sea level at the coast over timescales from a few seconds (individual wave runup) to a few hours (wave-induced setup). These wave-induced processes are of major importance for coastal management as they add up to tides and atmospheric surges during storm events and enhance coastal flooding and erosion. Changes in the atmospheric circulation associated with natural climate cycles or caused by increasing greenhouse gas emissions affect the wave conditions worldwide, which may drive significant changes in the wave-induced coastal hydrodynamics. Since sea-level rise represents a major challenge for sustainable coastal management, particularly in low-lying coastal areas and/or along densely urbanized coastlines, understanding the contribution of wind-generated waves to the long-term budget of coastal sea-level changes is therefore of major importance. -
Upwelling As a Source of Nutrients for the Great Barrier Reef Ecosystems: a Solution to Darwin's Question?
Vol. 8: 257-269, 1982 MARINE ECOLOGY - PROGRESS SERIES Published May 28 Mar. Ecol. Prog. Ser. / I Upwelling as a Source of Nutrients for the Great Barrier Reef Ecosystems: A Solution to Darwin's Question? John C. Andrews and Patrick Gentien Australian Institute of Marine Science, Townsville 4810, Queensland, Australia ABSTRACT: The Great Barrier Reef shelf ecosystem is examined for nutrient enrichment from within the seasonal thermocline of the adjacent Coral Sea using moored current and temperature recorders and chemical data from a year of hydrology cruises at 3 to 5 wk intervals. The East Australian Current is found to pulsate in strength over the continental slope with a period near 90 d and to pump cold, saline, nutrient rich water up the slope to the shelf break. The nutrients are then pumped inshore in a bottom Ekman layer forced by periodic reversals in the longshore wind component. The period of this cycle is 12 to 25 d in summer (30 d year round average) and the bottom surges have an alternating onshore- offshore speed up to 10 cm S-'. Upwelling intrusions tend to be confined near the bottom and phytoplankton development quickly takes place inshore of the shelf break. There are return surface flows which preserve the mass budget and carry silicate rich Lagoon water offshore while nitrogen rich shelf break water is carried onshore. Upwelling intrusions penetrate across the entire zone of reefs, but rarely into the Lagoon. Nutrition is del~veredout of the shelf thermocline to the living coral of reefs by localised upwelling induced by the reefs. -

Life on the Coral Reef
Coral Reef Teacher’s Guide Life on the Coral Reef Life on the Coral Reef THE CORAL REEF ECOSYSTEM The muddy silt drifts out to sea, covering the nearby Coral reefs provide the basis for the most productive coral reefs. Some corals can remove the silt, but many shallow water ecosystem in the world. An ecosystem cannot. If the silt is not washed off within a short pe- is a group of living things, such as coral, algae and riod of time by the current, the polyps suffocate and fishes, along with their non-living environment, such die. Not only the rainforest is destroyed, but also the as rocks, water, and sand. Each influences the other, neighboring coral reef. and both are necessary for the successful maintenance of life. If one is thrown out of balance by either natural Reef Zones or human-made causes, then the survival of the other Coral reefs are not uniform, but are shaped by the is seriously threatened. forces of the sea and the structure of the sea floor into DID YOU KNOW? All of the Earth’s ecosystems are a series of different parts or reef zones. Understand- interrelated, forming a shell of life that covers the ing these zones is useful in understanding the ecol- entire planet – the biosphere. For instance, if too many ogy of coral reefs. Keep in mind that these zones can trees are cut down in the rainforest, soil from the for- blend gradually into one another, and that sometimes est is washed by rain into rivers that run to the ocean. -

Oceans in Motion TCS 2018
TCS Marine Biology C. Woodward Oceans in Motion TCS 2018 Oceans in Motion Oceans in Motion – TIDES (“la marea”) • Caused by gravitational forces between moon & Earth • Also influenced by sun, tilt of Earth, topography, and other factors DAILY TIDE CYCLE • 2 high tides, 2 low tides per 24 hrs (due to Earth’s rotation) • Tides get ~1 hr later each day gravitational pull of moon See Figs. Oceans in Motion - TIDES MONTHLY TIDE CYCLE • Due to moon’s orbit around Earth, and gravitational pull of moon & sun • 2 spring and 2 neap tides per month Fig. 3.33 Catherine Woodward 1 of 6 Tropical Conservation Semester 1 TCS Marine Biology C. Woodward Oceans in Motion TCS 2018 Oceans in Motion – WAVES (“las olas”) SURFACE WATER MOVEMENT is wind driven Waves = upper surface; move water only to ≈1/2 wavelength (λ) Nybakken Fig 1.10 See C&H Fig. 3.27 Oceans in Motion Water movement is circular But circles not closed, especially in big waves and shallow water. Stoke’s Drift = displacement of water in the direction of wave movement Oceans in Motion SWELLS Wave size determined by: • Wind speed • Fetch • Duration See C&H Fig. 3.29 Longer waves move faster Catherine Woodward 2 of 6 Tropical Conservation Semester 2 TCS Marine Biology C. Woodward Oceans in Motion TCS 2018 Oceans in Motion – CURRENTS (“la corriente”) NEAR-SHORE CURRENTS • Created by wind (= waves) and shore topography • Longshore current, undertow, rip current Undertow: The seaward return of water along the bottom underneath breaking waves Oceans in Motion NEAR-SHORE CURRENTS • Created by wind (= waves) and shore topography • Longshore current, undertow, rip current Longshore current: Results when waves hit shore at an angle, pushing water and material down the shore. -

Momentum Balance Across a Barrier Reef Damien Sous, G
Momentum balance across a barrier reef Damien Sous, G. Dodet, F. Bouchette, M. Tissier To cite this version: Damien Sous, G. Dodet, F. Bouchette, M. Tissier. Momentum balance across a barrier reef. Journal of Geophysical Research. Oceans, Wiley-Blackwell, 2020, 125 (2), pp.e2019JC015503. 10.1029/2019JC015503. hal-02520270 HAL Id: hal-02520270 https://hal.archives-ouvertes.fr/hal-02520270 Submitted on 4 Aug 2020 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. RESEARCH ARTICLE Momentum Balance Across a Barrier Reef 10.1029/2019JC015503 D. Sous1,2 , G. Dodet3 , F. Bouchette4,5 , and M. Tissier6 Key Points: 1 • The first complete evaluation of Mediterranean Institute of Oceanography (MIO), Université de Toulon, Aix Marseille Université, CNRS, IRD, La Garde, momentum balance over a reef France, 2Univ Pau & Pays Adour / E2S UPPA, Chaire HPC-Waves, Laboratoire des Sciences de lIngénieur Appliques a la barrier from measurements and Méchanique et au Génie Electrique Fédération IPRA, ANGLET, France, 3IFREMER, Univ. Brest, CNRS, IRD, Laboratoire numerical modeling -

Marine Plants in Coral Reef Ecosystems of Southeast Asia by E
Global Journal of Science Frontier Research: C Biological Science Volume 18 Issue 1 Version 1.0 Year 2018 Type: Double Blind Peer Reviewed International Research Journal Publisher: Global Journals Online ISSN: 2249-4626 & Print ISSN: 0975-5896 Marine Plants in Coral Reef Ecosystems of Southeast Asia By E. A. Titlyanov, T. V. Titlyanova & M. Tokeshi Zhirmunsky Institute of Marine Biology Corel Reef Ecosystems- The coral reef ecosystem is a collection of diverse species that interact with each other and with the physical environment. The latitudinal distribution of coral reef ecosystems in the oceans (geographical distribution) is determined by the seawater temperature, which influences the reproduction and growth of hermatypic corals − the main component of the ecosystem. As so, coral reefs only occupy the tropical and subtropical zones. The vertical distribution (into depth) is limited by light. Sun light is the main energy source for this ecosystem, which is produced through photosynthesis of symbiotic microalgae − zooxanthellae living in corals, macroalgae, seagrasses and phytoplankton. GJSFR-C Classification: FOR Code: 060701 MarinePlantsinCoralReefEcosystemsofSoutheastAsia Strictly as per the compliance and regulations of : © 2018. E. A. Titlyanov, T. V. Titlyanova & M. Tokeshi. This is a research/review paper, distributed under the terms of the Creative Commons Attribution-Noncommercial 3.0 Unported License http://creativecommons.org/licenses/by-nc/3.0/), permitting all non commercial use, distribution, and reproduction in any medium, provided the original work is properly cited. Marine Plants in Coral Reef Ecosystems of Southeast Asia E. A. Titlyanov α, T. V. Titlyanova σ & M. Tokeshi ρ I. Coral Reef Ecosystems factors for the organisms’ abundance and diversity on a reef. -

Chapter 3 Impacts of Climate Change on the Physical Oceanography of the Great Barrier Reef
Part I: Introduction Chapter 3 Impacts of climate change on the physical oceanography of the Great Barrier Reef Craig Steinberg Sea full of life, the nourisher of kinds, Purger of earth, and medicines of men; Creating a sweet climate by my breath… Ralph Waldo Emerson, Sea shore, (1803–1882) American Philosopher and Poet. Part I: Introduction 3.1 Introduction The oceans function as vast reservoirs of heat, the top three metres of the ocean alone stores all the equivalent heat energy contained within the atmosphere29. This is due to the high specific heat of water, which is a measure of the ability of matter to absorb heat. The ocean therefore has by far the largest heat capacity and hence energy retention capability of any other climate system component. Surface ocean currents (significantly forced by large scale winds) play a major role in redistributing the earth’s heat energy around the globe by transporting it from the tropical regions poleward principally via western boundary currents such as the East Australian Current (EAC). These currents therefore have a major affect on maritime and continental weather and climate. It is important to understand the temporal and spatial scales that influence ocean processes. Energy is imparted to the ocean by sun, wind and gravitational tides. The energy of the resulting large-scale motions is transmitted progressively to smaller and smaller scales of motion through to molecular vibrations where energy is finally dissipated as heat 42. The oceans therefore play an important role in climate control and change, and Figure 3.1 shows the ranges of time and space, which characterise physical processes in the ocean and their hierarchical nature. -
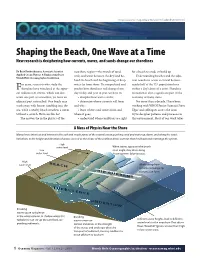
Shaping the Beach, One Wave at a Time New Research Is Deciphering How Currents, Waves, and Sands Change Our Shorelines
http://oceanusmag.whoi.edu/v43n1/raubenheimer.html Shaping the Beach, One Wave at a Time New research is deciphering how currents, waves, and sands change our shorelines By Britt Raubenheimer, Associate Scientist nearshore region—the stretch of sand, for a beach to erode or build up. Applied Ocean Physics & Engineering Dept. rock, and water between the dry land be- Understanding beaches and the adja- Woods Hole Oceanographic Institution hind the beach and the beginning of deep cent nearshore ocean is critical because or years, scientists who study the water far from shore. To comprehend and nearly half of the U.S. population lives Fshoreline have wondered at the appar- predict how shorelines will change from within a day’s drive of a coast. Shoreline ent fickleness of storms, which can dev- day to day and year to year, we have to: recreation is also a significant part of the astate one part of a coastline, yet leave an • decipher how waves evolve; economy of many states. adjacent part untouched. One beach may • determine where currents will form For more than a decade, I have been wash away, with houses tumbling into the and why; working with WHOI Senior Scientist Steve sea, while a nearby beach weathers a storm • learn where sand comes from and Elgar and colleagues across the coun- without a scratch. How can this be? where it goes; try to decipher patterns and processes in The answers lie in the physics of the • understand when conditions are right this environment. Most of our work takes A Mess of Physics Near the Shore Many forces intersect and interact in the surf and swash zones of the coastal ocean, pushing sand and water up, down, and along the coast. -

Physical Oceanography in Coral Reef Environments: Wave and Mean Flow Dynamics at Small and Large Scales, and Resulting Ecological Implications
PHYSICAL OCEANOGRAPHY IN CORAL REEF ENVIRONMENTS: WAVE AND MEAN FLOW DYNAMICS AT SMALL AND LARGE SCALES, AND RESULTING ECOLOGICAL IMPLICATIONS A DISSERTATION SUBMITTED TO THE DEPARTMENT OF CIVIL AND ENVIRONMENTAL ENGINEERING AND THE COMMITTEE ON GRADUATE STUDIES OF STANFORD UNIVERSITY IN PARTIAL FULFILLMENT OF THE REQUIREMENTS FOR THE DEGREE OF DOCTOR OF PHILOSOPHY Justin Scott Rogers December 2015 © 2015 by Justin S Rogers. All Rights Reserved. Re-distributed by Stanford University under license with the author. This work is licensed under a Creative Commons Attribution- Noncommercial 3.0 United States License. http://creativecommons.org/licenses/by-nc/3.0/us/ This dissertation is online at: http://purl.stanford.edu/fj342cd7577 ii I certify that I have read this dissertation and that, in my opinion, it is fully adequate in scope and quality as a dissertation for the degree of Doctor of Philosophy. Stephen Monismith, Primary Adviser I certify that I have read this dissertation and that, in my opinion, it is fully adequate in scope and quality as a dissertation for the degree of Doctor of Philosophy. Rob Dunbar I certify that I have read this dissertation and that, in my opinion, it is fully adequate in scope and quality as a dissertation for the degree of Doctor of Philosophy. Oliver Fringer I certify that I have read this dissertation and that, in my opinion, it is fully adequate in scope and quality as a dissertation for the degree of Doctor of Philosophy. Curt Storlazzi Approved for the Stanford University Committee on Graduate Studies. Patricia J. Gumport, Vice Provost for Graduate Education This signature page was generated electronically upon submission of this dissertation in electronic format. -

Comparative Perspectives on the Rise of the Brazilian Novel COMPARATIVE LITERATURE and CULTURE
Comparative Perspectives on the Rise of the Brazilian Novel COMPARATIVE LITERATURE AND CULTURE Series Editors TIMOTHY MATHEWS AND FLORIAN MUSSGNUG Comparative Literature and Culture explores new creative and critical perspectives on literature, art and culture. Contributions offer a comparative, cross- cultural and interdisciplinary focus, showcasing exploratory research in literary and cultural theory and history, material and visual cultures, and reception studies. The series is also interested in language-based research, particularly the changing role of national and minority languages and cultures, and includes within its publications the annual proceedings of the ‘Hermes Consortium for Literary and Cultural Studies’. Timothy Mathews is Emeritus Professor of French and Comparative Criticism, UCL. Florian Mussgnug is Reader in Italian and Comparative Literature, UCL. Comparative Perspectives on the Rise of the Brazilian Novel Edited by Ana Cláudia Suriani da Silva and Sandra Guardini Vasconcelos First published in 2020 by UCL Press University College London Gower Street London WC1E 6BT Available to download free: www.uclpress.co.uk Collection © Editors, 2020 Text © Contributors, 2020 The authors have asserted their rights under the Copyright, Designs and Patents Act 1988 to be identified as the authors of this work. A CIP catalogue record for this book is available from The British Library. This book is published under a Creative Commons 4.0 International licence (CC BY 4.0). This licence allows you to share, copy, distribute and transmit the work; to adapt the work and to make commercial use of the work providing attribution is made to the authors (but not in any way that suggests that they endorse you or your use of the work).