Shaping Asteroid Models Using Genetic Evolution (SAGE)
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Athena ΑΘΗΝΑ Zeus ΖΕΥΣ Poseidon ΠΟΣΕΙΔΩΝ Hades ΑΙΔΗΣ
gods ΑΠΟΛΛΩΝ ΑΡΤΕΜΙΣ ΑΘΗΝΑ ΔΙΟΝΥΣΟΣ Athena Greek name Apollo Artemis Minerva Roman name Dionysus Diana Bacchus The god of music, poetry, The goddess of nature The goddess of wisdom, The god of wine and art, and of the sun and the hunt the crafts, and military strategy and of the theater Olympian Son of Zeus by Semele ΕΡΜΗΣ gods Twin children ΗΦΑΙΣΤΟΣ Hermes of Zeus by Zeus swallowed his first Mercury Leto, born wife, Metis, and as a on Delos result Athena was born ΑΡΗΣ Hephaestos The messenger of the gods, full-grown from Vulcan and the god of boundaries Son of Zeus the head of Zeus. Ares by Maia, a Mars The god of the forge who must spend daughter The god and of artisans part of each year in of Atlas of war Persephone the underworld as the consort of Hades ΑΙΔΗΣ ΖΕΥΣ ΕΣΤΙΑ ΔΗΜΗΤΗΡ Zeus ΗΡΑ ΠΟΣΕΙΔΩΝ Hades Jupiter Hera Poseidon Hestia Pluto Demeter The king of the gods, Juno Vesta Ceres Neptune The goddess of The god of the the god of the sky The goddess The god of the sea, the hearth, underworld The goddess of and of thunder of women “The Earth-shaker” household, the harvest and marriage and state ΑΦΡΟΔΙΤΗ Hekate The goddess Aphrodite First-generation Second- generation of magic Venus ΡΕΑ Titans ΚΡΟΝΟΣ Titans The goddess of MagnaRhea Mater Astraeus love and beauty Mnemosyne Kronos Saturn Deucalion Pallas & Perses Pyrrha Kronos cut off the genitals Crius of his father Uranus and threw them into the sea, and Asteria Aphrodite arose from them. -

Lunar Occultations 2021
Milky Way, Whiteside, MO July 7, 2018 References: http://www.seasky.org/astronomy/astronomy-calendar-2021.html http://www.asteroidoccultation.com/2021-BestEvents.htm https://in-the-sky.org/newscalyear.php?year=2021&maxdiff=7 https://www.go-astronomy.com/solar-system/event-calendar.htm https://www.photopills.com/articles/astronomical-events-photography- guide#step1 https://www.timeanddate.com/eclipse/ All Photos by Mark Jones Unless noted Southern Cross May 6, 2018 Tulum, MX Full Moon Events 2021 Largest Apr 27 2021: diameter: 33.7’; 345,572km May 26, 2021: diameter: 33.4’; 358,014km; Eclipse Smallest Oct 20, 2021: diameter: 29.7’; 402,517km; Eclipse Image below shows the apparent size difference between largest and smallest dates Canon DSLR FL=300mm Full Moon Events 2021 May 26 – Lunar Eclipse- partial from STL Partial Start 4:23am, Alt=9 deg moon set 5:43am, 80% covered Aug 22 - Blue Moon Nov 19 – Lunar Eclipse – Almost total from STL Partial Start 1:19am, Alt=61 deg Max Partial 3:05am, Alt=42 deg Partial End 4:49am, Alt=23 deg Total Lunar Eclipse, Oct 8 2014 Canon DSLR, Celestron C-8 Other Moon Events 2021 V Lunar-X on the Moon (Start Times) • Mar 20 – 16:01 Alt=54° • May 18 – 17:34 Alt=65° • Jul 16 – 17:00 Alt=42° • Sep 13 – 16:09 Alt=15° X • Nov 11 – 18:03 Alt=32° Lunar V also seen at same Sun angles Yellow=Favorable Moon Conditions Other Moon Events 2021 Lunar V - Visible at the same time just north of the X. -

The Journey of Kratos - Pilot by Supabryanryan Brian Richardson
The Journey of Kratos - Pilot By SupaBryanRyan Brian Richardson Based on Greek Mythology, with my own OC’s (Original Character). It tells a story about a young angel named Kratos that is destined to bring the world back to it’s proper balance from the reign of his evil father (Toru),¯ with the help from his friends Aurora, and the Greek Gods/Goddesses that comes his way. He goes to mythical places like Ancient Athens, Atlantis, Mount Olympus, and many more to come. WGA Registration Number: 4299 Spring St. Apt.#32 1757620 San Diego, CA 91941 (619) 251-2425 [Text Message (Preferred)] [email protected] [Preferred] supabryanryan.wix.com/brian-richardson [For More Info] CARD: One who is injured ought not to return the injury, for on no account can it be right to do an injustice; and it is not right to return an injury, or to do evil to any man, however much we have suffered from him. - Socrates FADE OUT EXT. ROTATION OF WORLD - DAY & NIGHT The World is rotating, while the narrator is talking... NARRATOR In the 19th Century, when the Earth was still in order and developing into a peaceful state. Gods and Mortal lived separate to keep all things in order. While Narrator is talking; little bits of darkness is sprouting, but FADES OUT... NARRATOR What the world didn’t know that there was a unweighted chaos reaching towards it. Views of Angels FADE IN/OUT behind the World, and also God/Goddesses FADE IN/OUT in the background, while Narrator is talking... NARRATOR It started with a disease that plagued angels--it made them either die/had temporary memory loss/or placed in different regions around the world. -

Greek Gods and Myths – Overview Gaia and Uranus to Reign of the Olympians
GREEK GODS AND MYTHS – OVERVIEW GAIA AND URANUS TO REIGN OF THE OLYMPIANS ERA SUMMARY – GREEK GODS AND MYTHS The myths and legends of Ancient Greece are such an essential part of Greek culture that the first three units of the Ancient Greece Classical Curriculum are dedicated entirely to myth and folklore. Greek mythology is important, not only because it reflects the pagan religion of the Ancient world, but also because it gives great insight into Greek thought and expression. References to Greek Gods and folklore are present throughout the recorded history of the ancient world, in religious symbols and ceremonies, in literature, in poetry, in art, in archeological artifacts, and in day to day life. The Greeks worshiped Pagan gods but did not credit them with the same qualities of omniscience and goodness that Christians associate with their God. Greeks Gods shared many human foibles so the legends that arose concerning them were almost invariably dramas involving jealousy, indulgence, revenge, debauchery, and misunderstandings. Greek myths were often quite humorous and frequently involved morals applicable to human relations. The myths, heroes and legends of Ancient Greece are too numerous to list, but a few general categories of the types of heroes and stories can be given. The first category of Greek myths involves the Gods, or immortals, who have a human form, and decidedly human personality traits, but possess enormous powers over the earth. The twelve Olympians are the most ATHENE CHANGES ARACHNE INTO A SPIDER important, and they include Zeus, Poseidon, and Hades who rule over the heaven, Sea, and Underworld respectively. -

ATHENA Booksares in Thishades Series Artemis Hera Athena Poseidon Demeter Zeus
GODS & GODDESSES LOH-HAGAN OF THE ANCIENT WORLD Drama, passion, murder, and treachery—the ancient world of GODS & GODDESSES had it all. Gods could be fair and just or jealous and cruel. Temples were built in their honor and sacrifices were made to ensure they would bestow good fortune on mortals. Explore the whole series and get a glimpse into this thrilling ancient world! ATHENA BooksAres in thisHades Series Artemis Hera Athena Poseidon Demeter Zeus 45thHigh Parallel interest topics with Press accessible reading Features levels Considerate vocabulary Engaging content and fascinating facts Clear text and formatting Compelling photos AthenaVIRGINIA LOH-HAGAN www.cherrylakepublishing.com Page intentionally blank GODS & GODDESSES OF THE ANCIENT WORLD Athenaby Virginia Loh-Hagan Gods and goddesses were the main characters of myths. Myths are traditional stories from ancient cultures. Storytellers answered questions about the world by creating exciting explanations. People thought myths were true. Myths explained the unexplainable. They helped people make sense of human behavior and nature. Today, we use science to explain the world. But people still love myths. Myths may not be literally true. But they have meaning. They tell us something about our history and culture. Published in the United States of America by Cherry Lake Publishing Ann Arbor, Michigan www.cherrylakepublishing.com Content Adviser: Matthew Wellenbach, Catholic Memorial School, West Roxbury, MA Reading Adviser: Marla Conn MS, Ed., Literacy specialist, Read-Ability, Inc. -

Eros and the Good: the Portrayal of Erotic Experience in Plato and Bataillb
EROS AMI> THE GOOD EROS AND THE GOOD: THE PORTRAYAL OF EROTIC EXPERIENCE IN PLATO AND BATAILLB By PAULE. COREY, B.A. (Hons.) A Thesis Submitted to the School of Graduate Studies in Partial Fulfilment of the Requirements for the Degree Master of Arts McMaster University ~ Copyright by Paul E. Corey, September, 1993 MASTER OF ARTS (1993) McMaster University (Religious Studies) Hamilton, Ontario TITLE: Eros and the Good: The Portrayal of Erotic Experience in Plato and Bataille AUTHOR: Paul E. Corey, B.A. (Hons.) (University of Guelph) SUPERVISORY COMMITTEE: Dr. Zdravko Planinc Dr. P. Travis Kroeker NUMBER OF PAGES: viii, 162 ii ABSTRACT This thesis is a study of the portrayal of erotic experience given by Plato 1n the Symposium, and by Georges Bataille in his later theoretical writings, particularly Erotism and The Accursed Share. As such, this work is a comparison between an ancient and a modern understanding of eros in order to see which provides a more adequate account of erotic experience. Though Bataille does not directly critique Plato's understanding of eros, there are several passages within the Symposium that bear a striking resemblance to the erotic account given by Bataille. This is especially evident in the speech of Aristophanes, where Plato, through one of his characters, provides an erotic understanding that contains many of the same elements that are found in Bataille. The Aristophanic account of eros is directly criticized by Plato through Socrates' erotic speech in the same dialogue. By illuminating the Platonic critique of Aristophanes' erotic understanding, I will extend the critique to Bataille, thus demonstrating the crucial deficiencies within Bataille's account. -
Iso and Asteroids
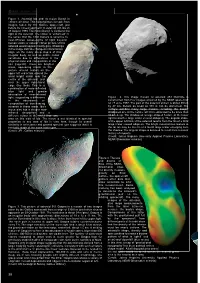
r bulletin 108 Figure 1. Asteroid Ida and its moon Dactyl in enhanced colour. This colour picture is made from images taken by the Galileo spacecraft just before its closest approach to asteroid 243 Ida on 28 August 1993. The moon Dactyl is visible to the right of the asteroid. The colour is ‘enhanced’ in the sense that the CCD camera is sensitive to near-infrared wavelengths of light beyond human vision; a ‘natural’ colour picture of this asteroid would appear mostly grey. Shadings in the image indicate changes in illumination angle on the many steep slopes of this irregular body, as well as subtle colour variations due to differences in the physical state and composition of the soil (regolith). There are brighter areas, appearing bluish in the picture, around craters on the upper left end of Ida, around the small bright crater near the centre of the asteroid, and near the upper right-hand edge (the limb). This is a combination of more reflected blue light and greater absorption of near-infrared light, suggesting a difference Figure 2. This image mosaic of asteroid 253 Mathilde is in the abundance or constructed from four images acquired by the NEAR spacecraft composition of iron-bearing on 27 June 1997. The part of the asteroid shown is about 59 km minerals in these areas. Ida’s by 47 km. Details as small as 380 m can be discerned. The moon also has a deeper near- surface exhibits many large craters, including the deeply infrared absorption and a shadowed one at the centre, which is estimated to be more than different colour in the violet than any 10 km deep. -

The Relationship Between Poverty and Eros in Plato's Symposium Lorelle D
Marquette University e-Publications@Marquette Dissertations (2009 -) Dissertations, Theses, and Professional Projects Love's Lack: The Relationship between Poverty and Eros in Plato's Symposium Lorelle D. Lamascus Marquette University Recommended Citation Lamascus, Lorelle D., "Love's Lack: The Relationship between Poverty and Eros in Plato's Symposium" (2010). Dissertations (2009 -). Paper 71. http://epublications.marquette.edu/dissertations_mu/71 LOVE’S LACK: THE RELATIONSHIP BETWEEN POVERTY AND EROS IN PLATO’S SYMPOSIUM By Lorelle D. Lamascus A Dissertation Submitted to the Faculty of the Graduate School, Marquette University, In partial fulfillment of the Requirements for the Degree of Doctor of Philosophy Department of Philosophy Milwaukee, Wisconsin December 2010 ABSTRACT LOVE’S LACK: THE RELATIONSHIP BETWEEN EROS AND POVERTY IN PLATO’S SYMPOSIUM Lorelle D. Lamascus Marquette University, 2010 This dissertation responds to a long-standing debate among scholars regarding the nature of Platonic Eros and its relation to lack. The more prominent account of Platonic Eros presents the lack of Eros as a deficiency or need experienced by the lover with respect to the object needed, lacked, or desired, so that the nature of Eros is construed as self-interested or acquisitive, subsisting only so long as the lover lacks the beloved object. This dissertation argues that such an interpretation neglects the different senses of lack present in the Symposium and presents an alternative interpretation of Eros based on the Symposium ’s presentation of Eros as the child of Poverty and Resource. Chapter one examines the origin and development of the position that Platonic Eros is acquisitive or egocentric and the influence this has had on subsequent interpretations of Plato’s thought. -
Occultations and 3D Shape Reconstruction
Asteroidal Occultations High precision astronomy for all Dave Herald A little history • Efforts to observed started in the 1980’s • Predictions initially very poor • Improvements as a result of: – Hipparcos – UCAC2, then UCAC4 – Gaia, then Gaia DR2 => Steady increase in successfully observed occultations, from 39 in 2000 to 502 in 2018 The objective • To accurately measure the size and shape of asteroids • Potentially discover satellites or rings around asteroids The problem • An occultation gives an accurate profile of an asteroid for its orientation at the time of an event • Asteroids are irregular to greater or lesser extents => an accurate asteroid diameter can’t be determined from one or two occultations – only an approximate diameter Asteroid Shape Models • A group of astronomers (largely ‘unpaid’ astronomers) measure the light curves of asteroids in different parts of their orbit • These light curves can be ‘inverted’ to derive the shape of the asteroid (30) Urania Light curve measurements (Blue dots ) and light curve from a model ( Red line ) Shape model ‘issues’ • A shape model has no size – just shape • The inversion process usually results in two different orientations of the axis of rotation – with differing shapes. Inversion process cannot determine which one is correct • The inversion process is complex. Early models were limited to convex surfaces. Over the last few years models with concave surfaces have been developed • Inversion assumes uniform surface reflectivity The two shape models for (30) Urania, with different rotational axes Two shape models for (130) Electra one convex, and one concave, model Fitting occultations to shape models • The next three slides show fits of the occultation of (90) Metis on 2008 Sept 12 to three shape models available for Metis, and the conclusions to be drawn. -

Visual Representations of the Birth of Athena/Menrva: a Comparative Study," Etruscan Studies: Vol
Etruscan Studies Journal of the Etruscan Foundation Volume 8 Article 5 2001 Visual Representations of the Birth of Athena/ Menrva: A Comparative Study Shanna Kennedy-Quigley University of California, Los Angeles Follow this and additional works at: https://scholarworks.umass.edu/etruscan_studies Recommended Citation Kennedy-Quigley, Shanna (2001) "Visual Representations of the Birth of Athena/Menrva: A Comparative Study," Etruscan Studies: Vol. 8 , Article 5. Available at: https://scholarworks.umass.edu/etruscan_studies/vol8/iss1/5 This Article is brought to you for free and open access by ScholarWorks@UMass Amherst. It has been accepted for inclusion in Etruscan Studies by an authorized editor of ScholarWorks@UMass Amherst. For more information, please contact [email protected]. Visual RepresenTaTions of The BirTh of AThena/Menrva: A ComparaTive STudy1 by Shanna Kennedy-Quigley he myth of Zeus’s miraculous ProPagation of Athena is the subject not only of such TGreek Poetic masters as Hesiod, Homer, Aeschylus, and EuriPides, but a favorite as well among Archaic and Classical Greek artists, eventually coming to occuPy the East Pediment of the Parthenon.2 PerhaPs through the imPortation of such Portable art- works as Painted vases, the Etruscans were exPosed to the legend, the fundamental iconog- raPhy of which they assimilated and transformed. The PurPose of this study is to demon- strate that Etruscan deviations from Greek archetyPes for rePresenting the birth of Athena exemPlify Etruscan cultural attitudes toward women, which differ significantly from those of their Greek contemPoraries. This study will examine Etruscan rePresentations of the myth, noting Etruscan dePartures from Greek archetyPes and demonstrating that these vari- ations reflect the comParatively liberated status of women in Etruria. -

Greek Gods/Mythology Notes - Information on the Greek Belief System Comes from Many Sources
Greek Gods/Mythology Notes - Information on the Greek belief system comes from many sources. Unlike followers of religions such as Christianity, Judaism, & Islam, the Greeks did not have a single sacred text, such as the Bible or Koran from which their beliefs and religious practices derived. Instead, they generally used oral traditions, passed on by word of mouth, to relate sacred stories. Priest and priestesses to various gods would also guide people in worship in various temples across Greece. We know something about these beliefs because Greek poets such as Homer, Hesiod and Pindar, and Greek dramatists such as Euripides, Aristophanes & Sophocles mention the myths in their various works. Greek mythology, however, was not static- it was constantly changing and evolving. Thus, there are often many different versions (and some that are contradictory toward one another) of the various Greek myths. Thus, some of the example myths you read in here may differ from ones you have previously heard. It does not necessarily make either version “wrong”- simply different. - The Greeks had many Gods & Goddesses- over three thousand if one were to count the many minor gods and goddesses. These deities made up the Greek pantheon, a word used to mean all the gods and goddesses (from the Greek word “pan” meaning all, and “theos” meaning gods). However, throughout Greece, there were always twelve (called the Twelve Olympians) that were the most important. They are: 1. Zeus 2. Hera 3. Poseidon 4. Athena 5. Apollo 6. Artemis 7. Hephaestus 8. Ares 9. Hermes 10. Aphrodite 11. Demeter 12. Dionysus 13. -

Solar System Objects in the ISOPHOT 170 Μm Serendipity Survey
A&A 389, 665–679 (2002) Astronomy DOI: 10.1051/0004-6361:20020596 & c ESO 2002 Astrophysics Solar system objects in the ISOPHOT 170 µm serendipity survey? T. G. M¨uller1,2, S. Hotzel3, and M. Stickel3 1 Max-Planck-Institut f¨ur extraterrestrische Physik, Giessenbachstraße, 85748 Garching, Germany 2 ISO Data Centre, Astrophysics Division, Space Science Department of ESA, Villafranca, PO Box 50727, 28080 Madrid, Spain (until Dec. 2001) 3 ISOPHOT Data Centre, Max-Planck-Institut f¨ur Astronomie, K¨onigstuhl 17, 69117 Heidelberg, Germany Received 14 January 2002 / Accepted 12 March 2002 Abstract. The ISOPHOT Serendipity Survey (ISOSS) covered approximately 15% of the sky at a wavelength of 170 µm while the ISO satellite was slewing from one target to the next. By chance, ISOSS slews went over many solar system objects (SSOs). We identified the comets, asteroids and planets in the slews through a fast and effective search procedure based on N-body ephemeris and flux estimates. The detections were analysed from a calibration and scientific point of view. Through the measurements of the well-known asteroids Ceres, Pallas, Juno and Vesta and the planets Uranus and Neptune it was possible to improve the photometric calibration of ISOSS and to extend it to higher flux regimes. We were also able to establish calibration schemes for the important slew end data. For the other asteroids we derived radiometric diameters and albedos through a recent thermophysical model. The scientific results are discussed in the context of our current knowledge of size, shape and albedos, derived from IRAS observations, occultation measurements and lightcurve inversion techniques.