A Mission Control Architecture for Robotic Lunar Sample Return As Field
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Martian Crater Morphology
ANALYSIS OF THE DEPTH-DIAMETER RELATIONSHIP OF MARTIAN CRATERS A Capstone Experience Thesis Presented by Jared Howenstine Completion Date: May 2006 Approved By: Professor M. Darby Dyar, Astronomy Professor Christopher Condit, Geology Professor Judith Young, Astronomy Abstract Title: Analysis of the Depth-Diameter Relationship of Martian Craters Author: Jared Howenstine, Astronomy Approved By: Judith Young, Astronomy Approved By: M. Darby Dyar, Astronomy Approved By: Christopher Condit, Geology CE Type: Departmental Honors Project Using a gridded version of maritan topography with the computer program Gridview, this project studied the depth-diameter relationship of martian impact craters. The work encompasses 361 profiles of impacts with diameters larger than 15 kilometers and is a continuation of work that was started at the Lunar and Planetary Institute in Houston, Texas under the guidance of Dr. Walter S. Keifer. Using the most ‘pristine,’ or deepest craters in the data a depth-diameter relationship was determined: d = 0.610D 0.327 , where d is the depth of the crater and D is the diameter of the crater, both in kilometers. This relationship can then be used to estimate the theoretical depth of any impact radius, and therefore can be used to estimate the pristine shape of the crater. With a depth-diameter ratio for a particular crater, the measured depth can then be compared to this theoretical value and an estimate of the amount of material within the crater, or fill, can then be calculated. The data includes 140 named impact craters, 3 basins, and 218 other impacts. The named data encompasses all named impact structures of greater than 100 kilometers in diameter. -
![1904-10-01, [P ]](https://docslib.b-cdn.net/cover/8370/1904-10-01-p-808370.webp)
1904-10-01, [P ]
îyj'^ c : 1 v ' %«!' Ka Ui-m ei« ST~I; V- : «£ää ï:'® * :m 1 :m JW I? NINE FATALLY HURT WRECK OS S. y. CENTRAL THE COMMONWEALTH.1 D0IX(iS OF A WEEK L<ÛUÜRZaR M‘yREC0ÏER THE POLITICAL OUTLOOK And Thirty Others Seriously Injured |>tü< il Published Weekly. Noted Improvement in Strength Con- DEATH LIST WILL in Iron Mountain Wreck. DEMOCRATIC MANAGERS HAVE Six People Sericus y Injured Near URKKNtTOOD, MISSISSIPPI. tmues After the Operation. fronton. Mo., Sept. 27.—One of the What Has IfaiijH itHl Throughout DONE BIG THINGS . 1 R Hi • I moat serious railçoad wrecks cm the Rochester, N. Y. ' liOAK * the Civilized World. Iron Mountain Railroad fur several REACH SIXTY-TWO •*11 > One id.-■ •»Iri-IlKlIi ; C. , Hi's occurred at 3 o'clock this morn* •I M 1 It I II I n • <1 I » Il r III It \pn 11MVIS HAS APPEASED WEST VIRGINIA Split Hull Uornilineni of in< n«*ar Vulcan, ‘•lie- smaii station in Tliree 'Ippppm, %ft«*r Wilrli » A WHI.k'S \KWS CONTjKNSED Terrible Loss of Life as Result of ■ wt ' i0 southern part ol this county, and Freight < riitli«-* Into the Train. M And Eié<ms Doesn’t Care »f Repubti- about 125 miles from St. Louis. The I/>r .'j Lady <’ur/ou of Wreck Near New Market, Tenn. cans Lose the State—Taggart Prom train was No. 17, a southbound passen Km;. Rochester, N. Y., Sept. 26.—Six pr-o. A Complete Review of the Happenings il a q let night, Sai Dr Here, urda ‘«e» to Deliver Indiana, and Con- T for Hot Springs, Ark., and was pic, who were injured in a wrccl on ill the Past Sete|l Days in ibis necticut and New York Both Look <Towd«d with visitors to the Anieri* the New York Centra] railroad, f ill CAUSE OF WRECK EXPLAINED a aud All Foreign Lauds. -

Appendix I Lunar and Martian Nomenclature
APPENDIX I LUNAR AND MARTIAN NOMENCLATURE LUNAR AND MARTIAN NOMENCLATURE A large number of names of craters and other features on the Moon and Mars, were accepted by the IAU General Assemblies X (Moscow, 1958), XI (Berkeley, 1961), XII (Hamburg, 1964), XIV (Brighton, 1970), and XV (Sydney, 1973). The names were suggested by the appropriate IAU Commissions (16 and 17). In particular the Lunar names accepted at the XIVth and XVth General Assemblies were recommended by the 'Working Group on Lunar Nomenclature' under the Chairmanship of Dr D. H. Menzel. The Martian names were suggested by the 'Working Group on Martian Nomenclature' under the Chairmanship of Dr G. de Vaucouleurs. At the XVth General Assembly a new 'Working Group on Planetary System Nomenclature' was formed (Chairman: Dr P. M. Millman) comprising various Task Groups, one for each particular subject. For further references see: [AU Trans. X, 259-263, 1960; XIB, 236-238, 1962; Xlffi, 203-204, 1966; xnffi, 99-105, 1968; XIVB, 63, 129, 139, 1971; Space Sci. Rev. 12, 136-186, 1971. Because at the recent General Assemblies some small changes, or corrections, were made, the complete list of Lunar and Martian Topographic Features is published here. Table 1 Lunar Craters Abbe 58S,174E Balboa 19N,83W Abbot 6N,55E Baldet 54S, 151W Abel 34S,85E Balmer 20S,70E Abul Wafa 2N,ll7E Banachiewicz 5N,80E Adams 32S,69E Banting 26N,16E Aitken 17S,173E Barbier 248, 158E AI-Biruni 18N,93E Barnard 30S,86E Alden 24S, lllE Barringer 29S,151W Aldrin I.4N,22.1E Bartels 24N,90W Alekhin 68S,131W Becquerei -

General Index Vols. I-X, Third Series
GENERAL INDEX VOLS. I-X, THIRD SERIES. SOTE.-The names of minerals are inserted only uuder the word XINERAL. The references to articles on Botany,Grology and Zoology, are grouped under these words, but at the same time are iu general inserted in their places elsewhere. A Adger, J B, analysis of talc, iv, 419. Abbe, C., method of least squares, i, 41 1. Adhesion, apparent. viii, 13'1. systems of telegraphy, ii, Africa, diamonds from, i, 69, 306 R. -1 dgesstz, A,, application of photography table for the computation of relative to natural history, noticed, iii, 156. altitudes, iii, 31. Revision of the Echini, noticed, v, eclipse of sun in 1869, iii. 264. 158, vii, I 61, viii, 72. auroras in Labrador, vi. 151. History of Balanoglorsus and Tor- Nebulre of Herschel's Cat., ix, 42. naria, noticed, v, 234, Abel and Brown, rapidity of detonation notice of papers on embryology by vii. 57. Kowalevsky, viii, 470. dbich, H., urork on hail in the Caucas. Hreckel's Gastrwa theory, viii, 472. sus, noticed, iv. 79. Embryology of Ctenophore, noticed, geologische Beobachtungen auf Rei. viii, 471. sen im Kaukasus, noticed, x, 390. exploration in South America, ix, 74. Abney, photographic irradiation, x, 296. Anderson School, ix, 408, x, 485. Academy, National, meeting, Nov., 1872. inctinct (1) in hermit crabs, x. 290. v, 78. Agassiz. E. C. and A,, Seaside Studies April, 1873, v, 483: 1874, vii, in Natural History, noticed, ii, 132. 603, 1875, ix. 483. Agnsszz, L.,tishaest in the Sargasso Xat. Sci.. New York. ix, 484. Sea, iii, 154, Phil. -

Native American Sacred Sites and the Department of Defense
Native American Sacred Sites and the Department of Defense Item Type Report Authors Deloria Jr., Vine; Stoffle, Richard W. Publisher Bureau of Applied Research in Anthropology, University of Arizona Download date 01/10/2021 17:48:08 Link to Item http://hdl.handle.net/10150/272997 NATIVE AMERICAN SACRED SITES AND THE DEPARTMENT OF DEFENSE Edited by Vine Deloria, Jr. The University of Colorado and Richard W. Stoffle The University of Arizona® Submitted to United States Department of Defense Washington, D. C. June 1998 DISCLAIMER The views and opinions expressed here are solely those of the authors and do not necessarily represent the views of the U. S. Department of Defense, the U.S. Department of the Interior, or any other Federal or state agency, or any Tribal government. Cover Photo: Fajada Butte, Chaco Culture National Historic Park, New Mexico NATIVE AMERICAN SACRED SITES AND THE DEPARTMENT OF DEFENSE Edited by Vine Deloria, Jr. The University of Colorado and Richard W. Stoffle The University of Arizona® Report Sponsored by The Legacy Resource Management Program United States Department of Defense Washington, D. C. with the assistance of Archeology and Ethnography Program United States National Park Service Washington, D. C. June 1998 TABLE OF CONTENTS List of Tables vii List of Figures ix List of Appendices x Acknowledgments xii Foreward xiv CHAPTER ONE INTRODUCTION 1 Scope of This Report 1 Overview of Native American Issues 3 History and Background of the Legacy Resources Management Program 4 Legal Basis for Interactions Regarding -
VV D C-A- R 78-03 National Space Science Data Center/ World Data Center a for Rockets and Satellites
VV D C-A- R 78-03 National Space Science Data Center/ World Data Center A For Rockets and Satellites {NASA-TM-79399) LHNAS TRANSI]_INT PHENOMENA N78-301 _7 CATAI_CG (NASA) 109 p HC AO6/MF A01 CSCl 22_ Unc.las G3 5 29842 NSSDC/WDC-A-R&S 78-03 Lunar Transient Phenomena Catalog Winifred Sawtell Cameron July 1978 National Space Science Data Center (NSSDC)/ World Data Center A for Rockets and Satellites (WDC-A-R&S) National Aeronautics and Space Administration Goddard Space Flight Center Greenbelt) Maryland 20771 CONTENTS Page INTRODUCTION ................................................... 1 SOURCES AND REFERENCES ......................................... 7 APPENDIX REFERENCES ............................................ 9 LUNAR TRANSIENT PHENOMENA .. .................................... 21 iii INTRODUCTION This catalog, which has been in preparation for publishing for many years is being offered as a preliminary one. It was intended to be automated and printed out but this form was going to be delayed for a year or more so the catalog part has been typed instead. Lunar transient phenomena have been observed for almost 1 1/2 millenia, both by the naked eye and telescopic aid. The author has been collecting these reports from the literature and personal communications for the past 17 years. It has resulted in a listing of 1468 reports representing only slight searching of the literature and probably only a fraction of the number of anomalies actually seen. The phenomena are unusual instances of temporary changes seen by observers that they reported in journals, books, and other literature. Therefore, although it seems we may be able to suggest possible aberrations as the causes of some or many of the phenomena it is presumptuous of us to think that these observers, long time students of the moon, were not aware of most of them. -

MARS STUDENT IMAGING PROJECT FINAL REPORT ASU MARS EDUCATION PROGRAM Waubonsie Valley High School | Period 1 | 12‐13 School Year
MARS STUDENT IMAGING PROJECT FINAL REPORT ASU MARS EDUCATION PROGRAM Waubonsie Valley High School | Period 1 | 12‐13 School Year I. Introduction What is your science question? What effect do the polar ice caps have on craters in the rock strata? Why is this question important and interesting? This question is important for the following reasons: 1. Could tell us more about the environmental conditions in the poles and their effects on geologic features. 2. Could tell us which land cover is more likely to preserve signs of past/ present water. List any hypotheses you may have had of what the answer(s) might be to your science question. 1. Craters found on the polar ice caps will be more likely to be destroyed or modified due to the erosional forces of the ice primarily through frost action and basal slip. II. Background Depressions in the This image was collected February 29, 2004 during the end of southern summer season. ice surface caused The local time at the location of the image was about 2 pm. The image shows an area in by sub‐ice craters the South Polar Region. Seasonal changes. The planet's rotation axis is tilted with respect to the orbital plane by almost 24 degrees, so Mars does experience significant seasonal differences in the amount of sunlight falling on a hemisphere during a year. The difference between winter and summer is more extreme on Mars than on Earth, due to the greater eccentricity of the Martian orbit. The Red Planet receives 40 percent more sunlight during its southern summer, when nearest the Sun, than during its southern winter, when the Sun is most distant. -

Vokietiją. Lenkai Skundžia
Organas Amerikos Lietuviu ■lt (No. 534) attbortad by An tt Octuber fl, 1917, oe flle at the Poat R. K. Švento Juosapo tfflce of Boston. Masa By order be T>n*i<ient. A_ S. Burlefion Post Darbininkų Są-gos General * | i ♦ •DARBININKAS’ Krikščionys darbininkai vi»- ----- Eina------ i AKN INKAIS, KETVEROAle i* ivkitės! S plėskitės j vieniu , SUBATOMIS Metams .............................................. JA5O fėlę darbo žmonių organiz* llžrubežy metams ........................ 5.50 »• riją Amerikoje — Lietuviu ‘Darbininkas Kttl)ADWA1 Bostob 27. M»- Darbininkų Sąjunga Tel. South Bonton ttO VOL. VII, No. 37 (735). SUBATA, BALANDŽIO 1 D., 1922. Kaina 5 centui 500.000 Angliakasiu Lenkai skundžia 3į streikan. Vokietiją.---------- 11 LENKIJOS SKUNDAS. EN-KARALIUS ris* ANGLIAKASIAI žiavimas įvyks bal. 4d. pro- MIRŠTA. STREIKAN. gramui išdirbti Genoos kon Berlin. — Lenkijos val _________ .< ferencijai. Angliakasių kontraktas džia kreipėsi į alijantų am Lisabonos.—Austro-V en- basadorių konferenciją su grijos ex-karalius Karolis, su kompanijomis pasibaigia YPATINGA DEMON skundu ant Vokietijos. Gir esąs ant Madeiro salos, mir kovo 31 d. Naujas kontrak STRACIJA. tas nepadarytas. Streikui di jau trys metai, kai Vo tinai susirgo. Jam suteiktas ivengti sutarimo nepadary P rovidence. — Rhode Is kietija komercialiai boiko paskutinis patepimas. Turi ta. Reiškia streikas prasi lando valstijos senatas kovo tuoja Lenkiją. Dabar Vo plaučių uždegimą. dės bal. 1 d. Šioje šalyje 29 d. svarstė Dilių, įvedantį kietija buvo bekalbanti apie angliakasių yra 750.000. Iš 48 vai. darbo savaite. Tai atšaukimą boikoto, bet rei NAUJA MILICIJA _ jų unijistų yra 500.000. Ne- tą dieną minių minios strei kalavo liuoso kelio pirkly- JERUZOLIME. bai su Rusija. Tai Lenkija unijistai nestreikuos. -

Advokatas Tos Policija Užsistojo Už Dar Tą Pačia Dieną Nuo Lietuvos Atstovo Prancūzijoj, Oska Danzigo
■ “PubUshed ORGANAS AMERIKOS LIETUVIŲ R K. ŠV. JUOZAPO DARBI NINKŲ SĄ-GOS. “DARBININKAS” eina utarninkais, ketvergaia ir subatomis Metams $4.00 Krikščionys darbininkai vie Bostone ir apylinkėj m. $5.00 nykitės! Spieskitės į vieninte Užrnbežyj metams $5.00 lę darbo žmonių organizaciją “DARBININKAS,” Amerikoje — Lietuvių Darbi 242-244 W. Broadway, ninkų Sąjungą. South Boston, Mass. TeL So. Boston 620. VOL. V, No. 59 (689). KAINA 5 CENTAI rovė jau pienuoja atidaryti <fi- ŽINIOS IŠ LIETUVOS. ’desnę bevielinio telegrafo sto Anglai prieš lenkus Seimo atidarymo iškilmes (Specialė “Darbininkui” korespondencija) tį, per kurią bus galima susi kalbėti su Anglija, Prancija, SEIMO ATIDARYMO DIENA BUVO DŽIAUGSMO IR Kopenhagoje lietuvių reika vienas kelias, tai yra Klaipė Danija ir Norvegija. Tada IŠKILMIŲ DIENA VISOJE LIETUVOJE. PRIE ŠLENKIŠKAS JU- ' Lenkija nesisavina tokių že- lus veda • Lietuvos Atstovas da. Iki Klaipėdos iš Kauno nors žinią galėsime gauti iš DĖJIMAS ANGLĮ- i mių, kokių savinosi pir- Jurgis Savickas. Jisai dar keliauja Valstybinis Lietuvos Lietuvos ir paskleisti po pla JOJ. miau. Girdi pirmiau reika- PIRMAM SEIMO POSĖDŽIUI PIRMININKAVO GABRIELĖ karės metu pradėjo darbuoties ti] pasaulį. PETKEVIČAITĖ, RAŠTININKAVO MURAŠKAITĖ. laivelis, bet iš1 Klaipėdos nėra London. — Westminster I lavą 9 gubernijas už ribų pa Lietuvos naudai. Nors buvo Daną kompanijos rengias nei vieno laivo. Baltisk Trans Centrai Hallėj buvo susirin čios Lenkijos, o dabar tik prispaustas neapsakomai sun didį biznį varyti su Rusija. port Kompagni veš tavorus ir kimas. Kalbėjo H. H. As- dviejų tereikalauja. Dvi IŠ RYTO KAUNE BUVO IŠKILMINGOS PAMALDOS kiomis aplinkybėmis, bet jis Jau jie nori steigti popieriaus pasažierius iš Lietuvos ir į quith, buvusis premjeras ir gubernijas užleidžiu Lietu VISŲ TIKYBŲ BAŽNYČIOSE. -
Topographic Map of Mars
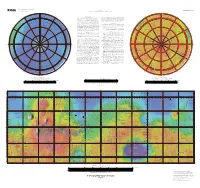
U.S. DEPARTMENT OF THE INTERIOR OPEN-FILE REPORT 02-282 U.S. GEOLOGICAL SURVEY Prepared for the NATIONAL AERONAUTICS AND SPACE ADMINISTRATION 180° 0° 55° –55° Russell Stokes 150°E NOACHIS 30°E 210°W 330°W 210°E NOTES ON BASE smooth global color look-up table. Note that the chosen color scheme simply 330°E Darwin 150°W This map is based on data from the Mars Orbiter Laser Altimeter (MOLA) 30°W — 60° represents elevation changes and is not intended to imply anything about –60° Chalcoporous v (Smith and others 2001), an instrument on NASA’s Mars Global Surveyor Milankovic surface characteristics (e.g. past or current presence of water or ice). These two (MGS) spacecraft (Albee and others 2001). The image used for the base of this files were then merged and scaled to 1:25 million for the Mercator portion and Rupes map represents more than 600 million measurements gathered between 1999 1:15,196,708 for the two Polar Stereographic portions, with a resolution of 300 and 2001, adjusted for consistency (Neumann and others 2001 and 2002) and S dots per inch. The projections have a common scale of 1:13,923,113 at ±56° TIA E T converted to planetary radii. These have been converted to elevations above the latitude. N S B LANI O A O areoid as determined from a martian gravity field solution GMM2 (Lemoine Wegener a R M S s T u and others 2001), truncated to degree and order 50, and oriented according to IS s NOMENCLATURE y I E t e M i current standards (see below). -

/ Vagos" Leidyklai
LAISVOJO PASAUUO LIETUVIU DIENRAŠTIS 4545 WEST 63rd STREET • CHICAGO, ILLINOIS 60629 TELEFONAS (312) 585-9500 UTKIUAIMIAIM W0R1_0-\A^I0E DAILY VoL IXXV Kaina 25 c. PIRMADIENIS — MONDAY, RUGPIOTIS — AUGUST 10, 1981 Nr. 185 . ; LICS KRONIKA NR. 47 Etas nuo 1972 metę BIZNIS SU RUSAIS Perskaitęs dnok kitam! VYKSTA TOLIAU // Vagos" leidyklai Sovietai perka dujų linijai traktorių (TęainyB) kariams katalikams pamaldas, tei Washingtonas. — Šią savaitę Vokietiją ir joje esančias linijas. Atsaikiau: grotos būna ne tik kia sakramentus, lanko ligonius, buvo paskelbta, kad Sovietų Są Projekto specialistai mano, kad kalėjimuose, bet ir sandėliuose. laidoja mirusius. Kipas buvo ka junga sutiko pratęsti javų pirki Amerikos bendrovės, ypač žemės Per visą savo vienuolinį gyveni pelionas karininko laipsnyje, bet mo sutartį su Amerika. Per atei kasimo ir statybos įmonės galėtų mą niekada nesu girdėjęs, kad kur jokio karo mokslo jis nėra ėjęs. nančius metus sovietai galės pirk uždirbti iš šio linijos apie bilijo nors vienuolyne būtų karceris. Štai svarbiausios jo gyvenimo da ti Amerikoje 6 —8 mil. tonų kvie ną dolerių. Mašinų pardavimą Ir kam gi jis reikalingas? Kas ne tos. Gimė 1884. XI. 4. Būdamas čių ir kukurūzų, o vėliau bus ban leido jau prezidento Carterio vy nori būti vienuoliu, tas gali visa 18 su puse metų, baigė gim doma sudaryti naują penkerių riausybė, davusi eksportavimo da išeiti. Jeigu man netikite, pa naziją ir 1903 m. pavasarį IV. 23 metų sutartį. Sakoma, kad sovie leidimus, nes parduodamos maši klauskite Juozą Stankaitį arba Ka įstojo į jėzuitų naujokyną. Po tai reikalauja garantijos, kad nos nėra laikomos "aukštos tech zį Urboną (žinoma Lietuvos ateis dviejų metų (1905 — 1908 m.) Amerikos vyriausybė sutarties lai nologijos" prekėmis ir todėl ne tai, anksčiau buvę vienuolyno no Į studijavo filosofiją, 1908 m. -

Mars and Its Mystery
Q.tjLa^cazv«g]^Ai^.p£J^^^uL>ti dm a MARS AND ITS MYSTERY Lowell's globe of mars, 1903. Frontispiece MARS AND ITS MYSTERY BY EDWARD S. MORSE Member National Academy of Sciences Author of "Japanese Homes and their Surroundings,' " Glimpses of China and Chinese Homes," etc. ILLUSTRATED BOSTON LITTLE, BROWN, AND COMPANY 1906 \ .0 Copyright, 1906, By LmxE, Brown, and Compaity. All rights reserved Published October, 1906 Asfrofnamcf Ifbraru (.HI M2Z TnE trKiySBSITT FKESB, OAUBBICOe, U. S. A. ^51 To PERCIVAL LOWELL WHO HAS BY HIS ENERGY AND SCIENTIFIC 8PIKIT ESTABLISHED A NEW STANDARD FOR THE STUDY OF MARS THIS BOOK IS AFFECTIONATELY INSCRIBED PREFACE The following pages have been written for the general reader. The controversies over the inter- . pretation of the curious markings of Mars and the (^ wide divergence of opinion as to their nature first turned my attention to the matter. The ques- tion of intelligence in other worlds is of peren- nial interest to everyone, and that question may possibly be settled by an unprejudiced study of /'^ our neighboring planet Mars. Knowing the many analogies between Mars and the Earth, we are justified in asking what conditions really exist in Mars. Instead of flouting at every at- tempt to interpret the various and complicated markings of its surface, we should soberly con- sider any rational explanation of these enigmas from the postulate that the two spheres, so near together in space, cannot be so far apart physi- cally, and from the fact that as intelligence is broadly modifying the appearance of the surface of the Earth, a similar intelligence may also be marking the face of Mars.