Magnetocentrifugal Launching of Jets from Accretion Disks. I. Cold
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

President's Column
AAAS Publication for the members N of the Americanewsletter Astronomical Society September/October 2010, Issue 154 CONTENTS President's Column Debra Meloy Elmegreen, [email protected] 2 Congratulations to all of us in the astronomical community on the completion of the Decadal From the Survey! Two years after the National Research Council organized the Astro2010 Committee to begin its arduous process, the report “New Worlds, New Horizons in Astronomy and Astrophysics” Executive Office is complete. In fact, as I write this article the public roll-out is underway at the Keck Center of the National Academies in Washington, DC. This was truly a community effort, and we should all be proud of it and feel ownership of it. The federal funding agencies and Congress widely view the 3 astronomy decadal process as a model for other disciplines to emulate, and it is extremely important for us to embrace it. Editor, The Astrophysical We are embarking on a period of unprecedented opportunities for astronomical research, thanks to great advances in technology, theory, and observations, and the report presents an exciting Journal Letters and balanced set of science-driven priorities within the framework of realistic budget scenarios. The Astro2010 committee comprised 23 astronomers, selected by the National Academies based on community solicitation of suggested names, who were assisted by panels on different science 4 disciplines, space- and ground-based activities, and study groups on the astronomical infrastructure; these subcommittees had a membership of nearly 200 astronomers from the US astronomical Journals Update community. The Survey report and the panel reports are the culmination of a careful and deliberate consideration of science goals, projects and missions and on the whole astronomical enterprise, based in part on the distillation of over 450 community-submitted white papers, over 100 proposals for 6 research activities, briefings from federal agencies, and 17 Town Halls, along with other federal and international reports. -

Science & ROGER PENROSE
Science & ROGER PENROSE Live Webinar - hosted by the Center for Consciousness Studies August 3 – 6, 2021 9:00 am – 12:30 pm (MST-Arizona) each day 4 Online Live Sessions DAY 1 Tuesday August 3, 2021 9:00 am to 12:30 pm MST-Arizona Overview / Black Holes SIR ROGER PENROSE (Nobel Laureate) Oxford University, UK Tuesday August 3, 2021 9:00 am – 10:30 am MST-Arizona Roger Penrose was born, August 8, 1931 in Colchester Essex UK. He earned a 1st class mathematics degree at University College London; a PhD at Cambridge UK, and became assistant lecturer, Bedford College London, Research Fellow St John’s College, Cambridge (now Honorary Fellow), a post-doc at King’s College London, NATO Fellow at Princeton, Syracuse, and Cornell Universities, USA. He also served a 1-year appointment at University of Texas, became a Reader then full Professor at Birkbeck College, London, and Rouse Ball Professor of Mathematics, Oxford University (during which he served several 1/2-year periods as Mathematics Professor at Rice University, Houston, Texas). He is now Emeritus Rouse Ball Professor, Fellow, Wadham College, Oxford (now Emeritus Fellow). He has received many awards and honorary degrees, including knighthood, Fellow of the Royal Society and of the US National Academy of Sciences, the De Morgan Medal of London Mathematical Society, the Copley Medal of the Royal Society, the Wolf Prize in mathematics (shared with Stephen Hawking), the Pomeranchuk Prize (Moscow), and one half of the 2020 Nobel Prize in Physics, the other half shared by Reinhard Genzel and Andrea Ghez. -

Professor Roger Blandford Stanford University, USA
2020 Jacques Solvay International Chair in Physics Professor Roger Blandford Stanford University, USA 5 ONLINE LECTURES VIA ZOOM Thursday 11 March 2021 at 5:30 PM Black Holes: Nature or Nurture?: The Role of Rotation in Powering Cosmic Sources Black holes power many of the most powerful sources in the universe through releasing the gravitational energy of accreting gas and by donating their rotational energy using electromagnetic feld. The interpre- tation of recent, remarkable images made by the Event Horizon Telescope of M87 will be discussed in the context of both modes. It will be proposed that the rotational mode dominates in sources like M87 so that the black hole spin drives away the accreting gas as a powerful hydromagnetic wind that collimates a pair of relativistic jets. Zoom Link: https://zoom.us/j/92256891111?pwd=NmROZHRBdStvbnUxR1BWb1A1ZlIydz09 Monday 15 March 2021 at 5:30 PM Cosmic Blowtorches: Relativistic Jets from Stars and Galaxies Powerful relativistic jets are made by black holes and neutron stars. They are prodigious emitters from the lowest radio frequencies to the highest energy gamma-rays. They may also create high energy cosmic rays and neutrinos. They are remarkably persistent as they escape from collapsing stars, active galaxies and merging neutron stars. It will be argued that their collimation, resilience and emission is generically due to the tensile action of electromagnetic feld. Zoom Link: https://zoom.us/j/93200154324?pwd=R2xqOEpKNVYwbU5xU1Z5bm1WL3djdz09 www.solvayinstitutes.be à 2020 Jacques Solvay International Chair in Physics Friday 19 March 2021 at 4:00 PM Fast Radio Bursts: ElectroMagnetic Pulses from Cosmologically Distant Neutron Stars with Hundred GigaTesla Magnetic Field? For over a decade, radio astronomers have been observing millisecond pulses of intense radio emission. -
Meeting Program
A A S MEETING PROGRAM 211TH MEETING OF THE AMERICAN ASTRONOMICAL SOCIETY WITH THE HIGH ENERGY ASTROPHYSICS DIVISION (HEAD) AND THE HISTORICAL ASTRONOMY DIVISION (HAD) 7-11 JANUARY 2008 AUSTIN, TX All scientific session will be held at the: Austin Convention Center COUNCIL .......................... 2 500 East Cesar Chavez St. Austin, TX 78701 EXHIBITS ........................... 4 FURTHER IN GRATITUDE INFORMATION ............... 6 AAS Paper Sorters SCHEDULE ....................... 7 Rachel Akeson, David Bartlett, Elizabeth Barton, SUNDAY ........................17 Joan Centrella, Jun Cui, Susana Deustua, Tapasi Ghosh, Jennifer Grier, Joe Hahn, Hugh Harris, MONDAY .......................21 Chryssa Kouveliotou, John Martin, Kevin Marvel, Kristen Menou, Brian Patten, Robert Quimby, Chris Springob, Joe Tenn, Dirk Terrell, Dave TUESDAY .......................25 Thompson, Liese van Zee, and Amy Winebarger WEDNESDAY ................77 We would like to thank the THURSDAY ................. 143 following sponsors: FRIDAY ......................... 203 Elsevier Northrop Grumman SATURDAY .................. 241 Lockheed Martin The TABASGO Foundation AUTHOR INDEX ........ 242 AAS COUNCIL J. Craig Wheeler Univ. of Texas President (6/2006-6/2008) John P. Huchra Harvard-Smithsonian, President-Elect CfA (6/2007-6/2008) Paul Vanden Bout NRAO Vice-President (6/2005-6/2008) Robert W. O’Connell Univ. of Virginia Vice-President (6/2006-6/2009) Lee W. Hartman Univ. of Michigan Vice-President (6/2007-6/2010) John Graham CIW Secretary (6/2004-6/2010) OFFICERS Hervey (Peter) STScI Treasurer Stockman (6/2005-6/2008) Timothy F. Slater Univ. of Arizona Education Officer (6/2006-6/2009) Mike A’Hearn Univ. of Maryland Pub. Board Chair (6/2005-6/2008) Kevin Marvel AAS Executive Officer (6/2006-Present) Gary J. Ferland Univ. of Kentucky (6/2007-6/2008) Suzanne Hawley Univ. -

Celebrating Years of 60Science Welcome to the 60Th Anni- Versary Symposium of the Miller Institute
Celebrating Years of 60Science Welcome to the 60th Anni- versary Symposium of the Miller Institute. In an age of ever increasing special- ization, the Miller Institute stands apart as one of the very few enterprises to embrace all of Science as its purview. For 60 years the Miller Institute has provided generous sup- port to some of the lead- ing postdoctoral fellows in all fields of science, has supported extended visits from famous scientists from around the world, and has provided critical adminis- trative and teaching relief for Berkeley faculty at par- ticularly important points in their career. This grand tradition lives on, even in the face of ever-greater challenges, with a refresh- ing emphasis on clarity in cross-discipline communi- cation. We have assembled a panel of eight luminaries drawn from past and pres- ent members of the Miller Institute each of whom leads their field with cre- ative research at the fron- tiers of human knowledge. So relax, enjoy, and be sure to ask that question that you always wanted to have answered. Jasper Rine, Professor of Genetics and Developmental Biology Chair, Miller Institute 60th 60th Anniversary Agenda Friday, January 15 – Sunday, January 17, 2016 Friday evening - Alumni House 5:00 - 7:00 Reception Saturday – Stanley Hall 8:00 - 8:45 Registration 8:45 - 9:00 Welcome 9:00 - 11:45 Maha Mahadevan: “On growth and form: geometry, physics and biology” Alice Guionnet: “About Universal Laws” Roger Bilham: “Earthquakes and Money: Frail Buildings, Philanthropic Engineers and a Few Corrupt Bad Guys -
Postmaster and the Merton Record 2019
Postmaster & The Merton Record 2019 Merton College Oxford OX1 4JD Telephone +44 (0)1865 276310 www.merton.ox.ac.uk Contents College News Edited by Timothy Foot (2011), Claire Spence-Parsons, Dr Duncan From the Acting Warden......................................................................4 Barker and Philippa Logan. JCR News .................................................................................................6 Front cover image MCR News ...............................................................................................8 St Alban’s Quad from the JCR, during the Merton Merton Sport ........................................................................................10 Society Garden Party 2019. Photograph by John Cairns. Hockey, Rugby, Tennis, Men’s Rowing, Women’s Rowing, Athletics, Cricket, Sports Overview, Blues & Haigh Awards Additional images (unless credited) 4: Ian Wallman Clubs & Societies ................................................................................22 8, 33: Valerian Chen (2016) Halsbury Society, History Society, Roger Bacon Society, 10, 13, 36, 37, 40, 86, 95, 116: John Cairns (www. Neave Society, Christian Union, Bodley Club, Mathematics Society, johncairns.co.uk) Tinbergen Society 12: Callum Schafer (Mansfield, 2017) 14, 15: Maria Salaru (St Antony’s, 2011) Interdisciplinary Groups ....................................................................32 16, 22, 23, 24, 80: Joseph Rhee (2018) Ockham Lectures, History of the Book Group 28, 32, 99, 103, 104, 108, 109: Timothy Foot -
An International Team of Astronomers Has Produced the First Ever Image of a Black Hole
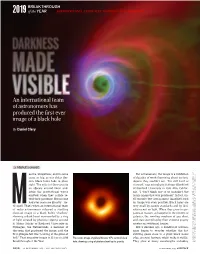
BREAKTHROUGH NEWS 2019 of the YEAR EMBARGOED UNTIL 2:00PM US ET, THURSDAY 19 DECEMBER 2019 An international team of astronomers has produced the first ever image of a black hole By Daniel Clery 3 PEOPLE’S CHOICE assive, ubiquitous, and in some For astronomers, the image is a validation cases as big as our Solar Sys- of decades of work theorizing about esoteric tem, black holes hide in plain objects they couldn’t see. “I’m still kind of sight. The effect of their gravity stunned,” says astrophysicist Roger Blandford on objects around them and, of Stanford University in Palo Alto, Califor- lately, the gravitational waves nia. “I don’t think any of us imagined the emitted when they collide re- iconic image that was produced.” In fact, un- veal their presence. But no one til recently few astronomers imagined such had ever seen one directly—un- an image was even possible. Black holes are til April. That’s when an international team very small by cosmic standards and by defi- Mof radio astronomers released a startling nition emit no light. When they grow to gar- close-up image of a black hole’s “shadow,” gantuan masses, as happens in the centers of showing a dark heart surrounded by a ring galaxies, the swirling mayhem of gas, dust, of light created by photons zipping around and stars stirred up by their extreme gravity it. Heino Falcke of Radboud University in creates an additional barrier. Nijmegen, the Netherlands, a member of But 2 decades ago, a handful of astrono- the team that produced the image, said the mers began to wonder whether the hot first glimpse felt like “looking at the gates of swirling gases close to a giant black hole’s hell.” That evocative image is Science’s 2019 The iconic image of galaxy Messier 87’s central black edge, or event horizon, might make it visible. -
THE WM KECK FOUNDATION 2006 Annual Report
THE W. M. KECK FOUNDATION 2006 ANNUAL REPORT promising directions NEWeyes THE W. M. KECK FOUNDATION 2006 ANNUAL REPORT CHAIRMAN’S MESSAGE For more than ten years, astronomers have been peering deeper into the universe using the twin telescopes at the W.M. Keck Observatory atop Hawaii’s Mauna Kea. At the same time those giant eyes are probing the vast frontiers of space, other Keck ION T grant recipients across the country are using precision instrumentation to make F O U N DA fundamental advances at nanometer dimensions. By supporting innovative basic K science and engineering through the development of new tools, the W.M. Keck THE W. M. KEC Foundation is helping scientists gain insight into our world at the subatomic, | 2 human and cosmic scales. P a g e While these tools, including the extraordinary Keck telescopes, are critically important for the advancement of science, we know that vision and discovery require more. What is also needed are ways for data captured by each lens – at any scale – to be examined, interpreted, shared and utilized by innovative minds across the full range of scientific disciplines. Because our objective is to stay at the forefront of innovative research funding, in the spring of 2006 the Foundation hosted two symposia where a diverse group of senior and junior scientists pooled their collective brilliance to discuss and debate bold new directions in scientific innovation. These insightful people confirmed our belief that innovation is not just about data. It’s about ideas. The 2006 symposia were modeled after a similar event we held in 1999, at which expert groups identified major future scientific challenges and opportunities in data management and analysis, genomics, nanotechnology and complexity. -

Fall 2013 Contents N Trade 1 N Academic Trade 28 a Letter from the Director N Princeton Reference 45
FALL 2013 Contents n Trade 1 n Academic Trade 28 A Letter from the Director n priNcetoN RefereNce 45 n NatUral HistorY 49 n Paperbacks 55 Reading and reference typically are thought of as separate activi- ties, but they come together neatly around an exciting cluster of n LiteratURE 80 highly readable fall 2013 Princeton Reference volumes. Included n Art 81 among these is a remarkable book, the Dictionary of Untrans- n ANcieNT HistorY 83 latables, edited by Barbara Cassin, an encyclopedic guide to some n ArchaeologY 84 400 terms and concepts—from a host of languages—that defy easy translation. This fall also sees the publication of The Princeton n Classics 84 Dictionary of Buddhism, the most comprehensive reference on the n MUsic 85 subject, edited by the distinguished team of Robert E. Buswell Jr. n ReligioN 86 and Donald S. Lopez Jr. An equally broad, field-defining reference in science appears this fall with The Princeton Guide to Evolution, n Middle East STUdies 87 edited by Harvard’s Jonathan B. Losos. Rounding out the quartet is n ChiNese LANGUage 88 A History of Jewish-Muslim Relations, edited by Abdelwahab Med- n World HistorY 88 deb and Benjamin Stora, a thorough guide to relations between n AmericaN HistorY 89 Jews and Muslims since the birth of Islam. n EUropeaN HistorY 91 We’re also proud to announce a new series, Princeton Classics, n EcoNomics 92 which celebrates our distinguished backlist. With bold new cover designs and in many cases new features, this series represents the n Political ScieNce 95 first concerted effort in the Press’s history to revive our greatest n INterNatioNAL RelatioNS 99 backlist titles. -

Testimony of Dr. Roger D. Blandford Luke Blossom Professor in the School of Humanities and Sciences Stanford University and Chai
Testimony of Dr. Roger D. Blandford Luke Blossom Professor in the School of Humanities and Sciences Stanford University and Chair, Committee for a Decadal Survey of Astronomy and Astrophysics National Research Council The National Academies before the Committee on Science, Space, and Technology U.S. House of Representatives December 6, 2011 Good morning. My name is Roger Blandford and I am the Luke Blossom Professor in the School of Humanities and Sciences at Stanford University. I chaired the 2010 National Research Council’s Decadal Survey in Astronomy and Astrophysics, ―New Worlds, New Horizons‖ (NWNH). The National Research Council (NRC) is the operating arm of the National Academy of Sciences, National Academy of Engineering, and the Institute of Medicine of the National Academies, chartered by Congress in 1863 to advise the government on matters of science and technology. I thank you for the opportunity to comment on James Webb Space Telescope (JWST) which was the highest priority recommendation in the 2001 decadal survey, Astronomy and Astrophysics in the New Millennium (AANM) and is a cornerstone of the scientific program advanced in NWNH. These comments are largely my own, although at times I will be referring to the findings of the 2001 and 2010 NRC Decadal Surveys. Chairman Hall, Ranking Member Johnson, allow me to begin by thanking you and your colleagues for your support of this project, most recently through the House-Senate Conference, H.R. 2112 where the budget to complete the project under the NASA ―replan‖ was restored and protection against further cost growth was instituted. I believe that this is a courageous recognition by you of the scientific importance and value of the telescope and an expression of confidence that NASA now has the management of this project under tight and realistic control. -

Events in Science, Mathematics, and Technology | Version 3.0
EVENTS IN SCIENCE, MATHEMATICS, AND TECHNOLOGY | VERSION 3.0 William Nielsen Brandt | [email protected] Classical Mechanics -260 Archimedes mathematically works out the principle of the lever and discovers the principle of buoyancy 60 Hero of Alexandria writes Metrica, Mechanics, and Pneumatics 1490 Leonardo da Vinci describ es capillary action 1581 Galileo Galilei notices the timekeeping prop erty of the p endulum 1589 Galileo Galilei uses balls rolling on inclined planes to show that di erentweights fall with the same acceleration 1638 Galileo Galilei publishes Dialogues Concerning Two New Sciences 1658 Christian Huygens exp erimentally discovers that balls placed anywhere inside an inverted cycloid reach the lowest p oint of the cycloid in the same time and thereby exp erimentally shows that the cycloid is the iso chrone 1668 John Wallis suggests the law of conservation of momentum 1687 Isaac Newton publishes his Principia Mathematica 1690 James Bernoulli shows that the cycloid is the solution to the iso chrone problem 1691 Johann Bernoulli shows that a chain freely susp ended from two p oints will form a catenary 1691 James Bernoulli shows that the catenary curve has the lowest center of gravity that anychain hung from two xed p oints can have 1696 Johann Bernoulli shows that the cycloid is the solution to the brachisto chrone problem 1714 Bro ok Taylor derives the fundamental frequency of a stretched vibrating string in terms of its tension and mass p er unit length by solving an ordinary di erential equation 1733 Daniel Bernoulli -

Trustees, Administration, Faculty
Section Six Trustees, Administration, Faculty 546 Trustees, Administration, Faculty OFFICERS Robert B. Chess (2006) Chairman Nektar Therapeutics Kent Kresa, C hairman Lounette M. Dyer (1998) David L. Lee, V ice Chairman Gilad I. Elbaz (2008) Founder Jean-Lou Chameau, President Factual Inc. Edward M. Stolper, Provost William T. Gross (1994) C hairman and Founder Dean W. Currie Idealab V ice President for Business and Frederick J. Hameetman (2006) Finance Chairman Charles Elachi Cal American Vice President and Director, Jet R obert T. Jenkins (2005) Propulsion Laboratory Peter D. Kaufman (2008) Peter D. Hero Chairman and CEO Vice President for Glenair, Inc. Development and Institute Jon Faiz Kayyem (2006) Relations CEO Sharon E. Patterson Osmetech PLC Associate Vice President for Louise Kirkbride (1995) Finance and Treasurer Board Member Scott Richland State of California Contractors Chief Investment Officer State License Board Anneila I. Sargent Jon B. Kutler (2005) Vice President for Student Chairman and CEO Affairs Admiralty Partners, Inc. Victoria D. Stratman Louis J. Lavigne Jr. (2009) General Counsel Management Consultant Mary L. Webster Lavigne Group Secretary David Li Lee (2000) Managing General Partner Clarity Partners, L.P. BOARD OF TRUSTEES York Liao (1997) Managing Director Winbridge Company Ltd. Trustees Alexander Lidow (1998) (with date of first election) CEO EPC Corporation Robert C. Bonner (2008) Ronald K. Linde (1989) Senior Partner Independent Investor Sentinel HS Group, L.L.C. Chair, The Ronald and Maxine Brigitte M. Bren (2009) Linde Foundation John E. Bryson (2005) Founder/Former CEO Chairman and CEO (Retired) Envirodyne Industries, Inc. Edison International Shirley M. Malcom (1999) Jean-Lou Chameau (2006) Director, Education and Human President Resources Programs California Institute of Technology American Association for the Milton Chang (2005) Advancement of Science Managing Director Deborah McWhinney (2007) President Incubic Venture Capital 547 John S.