Aerobot Dynamics Simulations for Planetary Exploration of Titan
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Venus Aerobot Multisonde Mission
w AIAA Balloon Technology Conference 1999 Venus Aerobot Multisonde Mission By: James A. Cutts ('), Viktor Kerzhanovich o_ j. (Bob) Balaram o), Bruce Campbell (2), Robert Gershman o), Ronald Greeley o), Jeffery L. Hall ('), Jonathan Cameron o), Kenneth Klaasen v) and David M. Hansen o) ABSTRACT requires an orbital relay system that significantly Robotic exploration of Venus presents many increases the overall mission cost. The Venus challenges because of the thick atmosphere and Aerobot Multisonde (VAMuS) Mission concept the high surface temperatures. The Venus (Fig 1 (b) provides many of the scientific Aerobot Multisonde mission concept addresses capabilities of the VGA, with existing these challenges by using a robotic balloon or technology and without requiring an orbital aerobot to deploy a number of short lifetime relay. It uses autonomous floating stations probes or sondes to acquire images of the (aerobots) to deploy multiple dropsondes capable surface. A Venus aerobot is not only a good of operating for less than an hour in the hot lower platform for precision deployment of sondes but atmosphere of Venus. The dropsondes, hereafter is very effective at recovering high rate data. This described simply as sondes, acquire high paper describes the Venus Aerobot Multisonde resolution observations of the Venus surface concept and discusses a proposal to NASA's including imaging from a sufficiently close range Discovery program using the concept for a that atmospheric obscuration is not a major Venus Exploration of Volcanoes and concern and communicate these data to the Atmosphere (VEVA). The status of the balloon floating stations from where they are relayed to deployment and inflation, balloon envelope, Earth. -

Titan and Enceladus $1 B Mission
JPL D-37401 B January 30, 2007 Titan and Enceladus $1B Mission Feasibility Study Report Prepared for NASA’s Planetary Science Division Prepared By: Kim Reh Contributing Authors: John Elliott Tom Spilker Ed Jorgensen John Spencer (Southwest Research Institute) Ralph Lorenz (The Johns Hopkins University, Applied Physics Laboratory) KSC GSFC ARC Approved By: _________________________________ Kim Reh Dr. Ralph Lorenz Jet Propulsion Laboratory The Johns Hopkins University, Applied Study Manager Physics Laboratory Titan Science Lead _________________________________ Dr. John Spencer Southwest Research Institute Enceladus Science Lead Pre-decisional — For Planning and Discussion Purposes Only Titan and Enceladus Feasibility Study Report Table of Contents JPL D-37401 B The following members of an Expert Advisory and Review Board contributed to ensuring the consistency and quality of the study results through a comprehensive review and advisory process and concur with the results herein. Name Title/Organization Concurrence Chief Engineer/JPL Planetary Flight Projects Gentry Lee Office Duncan MacPherson JPL Review Fellow Glen Fountain NH Project Manager/JHU-APL John Niehoff Sr. Research Engineer/SAIC Bob Pappalardo Planetary Scientist/JPL Torrence Johnson Chief Scientist/JPL i Pre-decisional — For Planning and Discussion Purposes Only Titan and Enceladus Feasibility Study Report Table of Contents JPL D-37401 B This page intentionally left blank ii Pre-decisional — For Planning and Discussion Purposes Only Titan and Enceladus Feasibility Study Report Table of Contents JPL D-37401 B Table of Contents 1. EXECUTIVE SUMMARY.................................................................................................. 1-1 1.1 Study Objectives and Guidelines............................................................................ 1-1 1.2 Relation to Cassini-Huygens, New Horizons and Juno.......................................... 1-1 1.3 Technical Approach............................................................................................... -
A01 the Most Important Industrial Gases – Applications and Properties
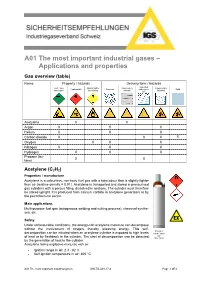
A01 The most important industrial gases – Applications and properties Gas overview (table) Name Property / hazards Delivery form / hazards Liquefied Inert / non- Oxidising/fire Dissolved (in Cryogenically Combustible Gaseous under pres- Solid flammable intensifying solvent) liquefied sure Acetylene X X Argon X X X Helium X X X Carbon dioxide X X X X Oxygen X X X Nitrogen X X X Hydrogen X X X Propane (bu- X X tane) Acetylene (C2H2) Properties / manufacture Acetylene is a colourless, non-toxic fuel gas with a faint odour that is slightly lighter than air (relative density = 0.91). Acetylene is transported and stored in pressurised gas cylinders with a porous filling, dissolved in acetone. The cylinder must therefore be stored upright. It is produced from calcium carbide in acetylene generators or by the petrochemical sector. Main applications Multi-purpose fuel gas (autogenous welding and cutting process), chemical synthe- ses, etc. Safety Under unfavourable conditions, the energy-rich acetylene molecule can decompose without the involvement of oxygen, thereby releasing energy. This self- Shoulder decomposition can be initiated when an acetylene cylinder is exposed to high levels colour “oxide red” of heat or by flashback in the cylinder. The start of decomposition can be detected RAL 3009 by the generation of heat in the cylinder. Acetylene forms explosive mixtures with air. Ignition range in air: 2.3 - 82 % Self-ignition temperature in air: 305 °C A01 The most important industrial gases IGS-TS-A01-17-d Page 1 of 4 Argon (Ar) Properties / manufacture Argon is a colourless, odourless, non-combustible gas, extremely inert noble gas and heavier than air (relative density = 1.78). -

Colonization of Venus
Conference on Human Space Exploration, Space Technology & Applications International Forum, Albuquerque, NM, Feb. 2-6 2003. Colonization of Venus Geoffrey A. Landis NASA Glenn Research Center mailstop 302-1 21000 Brook Park Road Cleveland, OH 44135 21 6-433-2238 geofrq.landis@grc. nasa.gov ABSTRACT Although the surface of Venus is an extremely hostile environment, at about 50 kilometers above the surface the atmosphere of Venus is the most earthlike environment (other than Earth itself) in the solar system. It is proposed here that in the near term, human exploration of Venus could take place from aerostat vehicles in the atmosphere, and that in the long term, permanent settlements could be made in the form of cities designed to float at about fifty kilometer altitude in the atmosphere of Venus. INTRODUCTION Since Gerard K. O'Neill [1974, 19761 first did a detailed analysis of the concept of a self-sufficient space colony, the concept of a human colony that is not located on the surface of a planet has been a major topic of discussion in the space community. There are many possible economic justifications for such a space colony, including use as living quarters for a factory producing industrial products (such as solar power satellites) in space, and as a staging point for asteroid mining [Lewis 19971. However, while the concept has focussed on the idea of colonies in free space, there are several disadvantages in colonizing empty space. Space is short on most of the raw materials needed to sustain human life, and most particularly in the elements oxygen, hydrogen, carbon, and nitrogen. -

Demonstrating Real-World Cooperative Systems Using Aerobots
In Proceedings of the 9th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2006' ESTEC, Noordwijk, The Netherlands, November 28-30, 2006 DEMONSTRATING REAL-WORLD COOPERATIVE SYSTEMS USING AEROBOTS Ehsan Honary1, Frank McQuade1, Roger Ward1, Ian Woodrow2, Andy Shaw3, Dave Barnes3, Matthew Fyfe4 1SciSys [email protected], [email protected], [email protected] Clothier Road, Bristol BS4 5SS, UK TEL: +44 (117) 9717251, FAX: +44 (117) 9721846 2SEA [email protected] Systems Engineering & Assessment Ltd, Beckington Castle, Castle Corner, Beckington, Frome BA11 6TB, UK, TEL: +44 (1373) 852120, FAX: +44 (1373) 831133 3University of Wales Aberystwyth Andy Shaw: [email protected], Dave Barnes: [email protected] Computer Science Department, Penglais, Aberystwyth, Ceredigion, SY23 3DB, Wales, UK TEL: +44 (1970) 621561, FAX: +44 (1970) 622455 4SCS [email protected] Systems Consultants Services Limited, Henley-on-Thames, Oxfordshire, England, RG9 2JN TEL: +44 (1491) 412102, FAX: +44 (1491) 412082 ABSTRACT Use of multiple autonomous robots for practical applications has become more important over the years [1][2][3][4]. The potential for applications of collective robotics is high, in particular in the aerospace environment. SciSys has been involved in the development of Planetary Aerobots funded by ESA for use on Mars and has developed image-based localisation technology as part of the activity. It is however possible to use the Aerobots in a different environment to investigate issues in regard with robotics behaviour such as data handling, communications, limited processing power, limited sensors, GNC, etc. This paper summarises the activity where Aerobot platform was used to investigate the use of multiple autonomous Unmanned Underwater Vehicles (UUVs), basically simulating their movement and behaviour. -

2013 News Archive
Sep 4, 2013 America’s Challenge Teams Prepare for Cross-Country Adventure Eighteenth Race Set for October 5 Launch Experienced and formidable. That describes the field for the Albuquerque International Balloon Fiesta’s 18th America’s Challenge distance race for gas balloons. The ten members of the five teams have a combined 110 years of experience flying in the America’s Challenge, along with dozens of competitive years in the other great distance race, the Coupe Aéronautique Gordon Bennett. Three of the five teams include former America’s Challenge winners. The object of the America’s Challenge is to fly the greatest distance from Albuquerque while competing within the event rules. The balloonists often stay aloft more than two days and must use the winds aloft and weather systems to their best advantage to gain the greatest distance. Flights of more than 1,000 miles are not unusual, and the winners sometimes travel as far as Canada and the U.S. East Coast. This year’s competitors are: • Mark Sullivan and Cheri White, USA: Last year Sullivan, from Albuquerque, and White, from Austin, TX, flew to Beauville, North Carolina to win their second America’s Challenge (their first was in 2008). Their winning 2012 flight of 2,623 km (1,626 miles) ended just short of the East Coast and was the fourth longest in the history of the race. The team has finished as high as third in the Coupe Gordon Bennett (2009). Mark Sullivan, a multiple-award-winning competitor in both hot air and gas balloons and the American delegate to the world ballooning federation, is the founder of the America’s Challenge. -

Atmospheric Planetary Probes And
SPECIAL ISSUE PAPER 1 Atmospheric planetary probes and balloons in the solar system A Coustenis1∗, D Atkinson2, T Balint3, P Beauchamp3, S Atreya4, J-P Lebreton5, J Lunine6, D Matson3,CErd5,KReh3, T R Spilker3, J Elliott3, J Hall3, and N Strange3 1LESIA, Observatoire de Paris-Meudon, Meudon Cedex, France 2Department Electrical & Computer Engineering, University of Idaho, Moscow, ID, USA 3Jet Propulsion Laboratory, California Institute of Technology, Pasadena, CA, USA 4University of Michigan, Ann Arbor, MI, USA 5ESA/ESTEC, AG Noordwijk, The Netherlands 6Dipartment di Fisica, University degli Studi di Roma, Rome, Italy The manuscript was received on 28 January 2010 and was accepted after revision for publication on 5 November 2010. DOI: 10.1177/09544100JAERO802 Abstract: A primary motivation for in situ probe and balloon missions in the solar system is to progressively constrain models of its origin and evolution. Specifically, understanding the origin and evolution of multiple planetary atmospheres within our solar system would provide a basis for comparative studies that lead to a better understanding of the origin and evolution of our Q1 own solar system as well as extra-solar planetary systems. Hereafter, the authors discuss in situ exploration science drivers, mission architectures, and technologies associated with probes at Venus, the giant planets and Titan. Q2 Keywords: 1 INTRODUCTION provide significant design challenge, thus translating to high mission complexity, risk, and cost. Since the beginning of the space age in 1957, the This article focuses on the exploration of planetary United States, European countries, and the Soviet bodies with sizable atmospheres, using entry probes Union have sent dozens of spacecraft, including and aerial mobility systems, namely balloons. -

Energy Efficient Trajectory Generation for a State-Space Based JPL Aerobot
The 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems October 18-22, 2010, Taipei, Taiwan Energy Efficient Trajectory Generation for a State-Space Based JPL Aerobot Weizhong Zhang, Tamer Inanc and Alberto Elfes Abstract— The 40th anniversary of Apollo 11 project with For aerial robotic planetary exploration, some aerial vehi- man landing on the moon reminds the world again by what cles such as airplanes, gliders, helicopters, balloons [4] and science and engineering can do if the man is determined airships [5][6][7][8] have been considered. Airplanes and to do. However, a huge step can only be achieved step by step which may be relatively small at the beginning. Robotic helicopters require significant energy to just stay airborne, exploration can provide necessary information needed to do the flight time of gliders depend mainly on wind, while balloons further step safely, with less cost, more conveniently. Trajectory have limited navigation capabilities. Lighter-Than-Air (LTA) generation for a robotic vehicle is an essential part of the vehicles combine long term mission capability and low total mission planning. To save energy by exploiting possible energy requirement of balloons with the maneuverability of resources such as wind will assist a robotic explorer extend its life span and perform tasks more reliably. In this paper, airplanes. LTA systems, a.k.a. Aerobots or Robotic Airships, we propose to utilize Nonlinear Trajectory Generation (NTG) bring a new opportunity for robotic exploration of planets methodology to generate energy efficient trajectores for the JPL and their moons which have atmosphere. Aerobots can pro- Aerobot by exploiting wind. -

Mabvap: One Step Closer to an Aerobot Mission to Mars
Fifth International Conference on Mars 6119.pdf MABVAP: ONE STEP CLOSER TO AN AEROBOT MISSION TO MARS V.V.Kerzhanovich1, J.A.Cutts1, A.D.Bachelder1, J.M.Cameron1, J.L.Hall1, J.D.Patzold1, M.B.Quadrelli1, A.H.Yavrouian1, J.A.Cantrell2, T. T. Lachenmeier3, M.G.Smith4, 1 Jet Propulsion Laboratory, California Institute of Technology, Pasadena, CA; 2 Space Dynamics Laboratory, Utah State University, Logan, UT; 3 GSSL, Inc., Hillsboro, OR; 4 Raven Industries, Sulphur Springs, TX Lighter-than-air planetary missions continued attract MABTEX would employ a ~10-m spherical super- growing interest in Mars exploration due to unique pressure balloon with 2.5-3 kg payload providing a combination of proximity to the surface and mobility lifetime in excess of 1 week and possibly much that far surpasses capability of surface vehicles. longer. Recent progress in microminiaturization - Following the experience with the Sojourner rover Sojourner(10 kg) and Muses-C(1.2 kg) rovers, DS-2 and subsequent development of powerful rovers for Mars Microprobes(3.5 kg) - proves that this payload Mars 2003 and 2005 missions it became clear that can serve not only as a technology demonstration but on Mars surface rover mobility is quite restricted. alos can provide a significant opportunity for new Realistic travel distances may be limited to tens of types of scientific measurements. High spatial reso- kilometers per year on relatively obstacle-free plains lution measurements of the remanent magnetic field and a few kilometers or less on the more rugged ter- on Mars, high-resolution imaging and sub-surface rains. -
Development of Small, Mobile, Special-Purpose
NATIONAL AERONAUTICS AND SPACE ADMINISTRATION CONTRACT NO. NAS 7-918 TECHNICAL SUPPORT PACKAGE On DEVELOPMENT OF SMALL, MOBILE, SPECIAL-PURPOSE . ROBOTS I for March 98 NASA TECH BRIEF Vol. 22, No. 2, Item #109 from JPL NEW TECHNOLOGY REPORT NPO-20267 Inventor(s): NOTICE Sarita Thakoor Neither the United States Government, nor NASA, nor any person acting on behalf of NASA: a. Makes any warranty or representation, express or implied, with respect of the accuracy, completeness, or usefulness of the information contained in this document, or that the use of any information, apparatus, method, or process disclosed in this document may not infringe privately owned rights; or b. Assumes any liabilities with respect to the use of, or for damages resulting from the use of, any information, apparatus, method or process disclosed in this document. TSP assembled by: JPL Technology Reporting Office pp. i, 1-15 JET PRO PULSION LABORATORY CA LIFO RN IA IN ST IT UTEOF TECHNOLOGY PA SAD EN A, CALIFORNIA March 98 Development of Small, Mobile, Special-Purpose Robots A report presents a scenario for the pro- communicate with fewer larger, more- various robotic tasks. A list of tentative posed development of insectlike robots complex robots, and so forth up a hierar- development goals is presented; the final that would be equipped with microsensors chy to a central robot or instrumentation goal in this list is the demonstration of an and/or micromanipulators, and would be system. The report discusses the historical insectlike exploratory robot in the year designed, variously, to crawl, burrow, background of the concept, presents an 2001 and beyond. -
Rest of the Solar System” As We Have Covered It in MMM Through the Years
As The Moon, Mars, and Asteroids each have their own dedicated theme issues, this one is about the “rest of the Solar System” as we have covered it in MMM through the years. Not yet having ventured beyond the Moon, and not yet having begun to develop and use space resources, these articles are speculative, but we trust, well-grounded and eventually feasible. Included are articles about the inner “terrestrial” planets: Mercury and Venus. As the gas giants Jupiter, Saturn, Uranus, and Neptune are not in general human targets in themselves, most articles about destinations in the outer system deal with major satellites: Jupiter’s Io, Europa, Ganymede, and Callisto. Saturn’s Titan and Iapetus, Neptune’s Triton. We also include past articles on “Space Settlements.” Europa with its ice-covered global ocean has fascinated many - will we one day have a base there? Will some of our descendants one day live in space, not on planetary surfaces? Or, above Venus’ clouds? CHRONOLOGICAL INDEX; MMM THEMES: OUR SOLAR SYSTEM MMM # 11 - Space Oases & Lunar Culture: Space Settlement Quiz Space Oases: Part 1 First Locations; Part 2: Internal Bearings Part 3: the Moon, and Diferent Drums MMM #12 Space Oases Pioneers Quiz; Space Oases Part 4: Static Design Traps Space Oases Part 5: A Biodynamic Masterplan: The Triple Helix MMM #13 Space Oases Artificial Gravity Quiz Space Oases Part 6: Baby Steps with Artificial Gravity MMM #37 Should the Sun have a Name? MMM #56 Naming the Seas of Space MMM #57 Space Colonies: Re-dreaming and Redrafting the Vision: Xities in -

Are Airships Making a Comeback? Nicolas Raymond
Mike Follows Are airships making a comeback? Nicolas Raymond Hot air balloons over When hot air balloons are propelled through the Quebec, Canada air rather than just being pushed along by the wind they are known as airships or dirigibles. The heyday of airships came to an abrupt end when the Hindenburg crashed dramatically in 1937. But, as Mike Follows explains, modern airships may Key words have a role in the future. density According to Archimedes’ Principle, any object forces immersed in a fluid receives an upthrust equal to the weight of the fluid it displaces. This can be Newton’s laws applied to lighter-than-air balloons: a balloon aircraft will descend if its weight exceeds that of the air displaced and rise if its weight is less. We can also think of this in terms of density. A balloon will rise if its overall density (balloon + air inside) is less than the density of the surrounding air. In hot-air balloons, the volume is constant and the density of air is varied by changing its temperature. Heating the air inside the envelope using the open flame from a burner in the gondola suspended beneath causes the air to expand and escape out through the bottom of the envelope. The top of the balloon usually has a vent of some sort, enabling the pilot to release hot air to slow an ascent. Colder, denser air will enter through the hole at the bottom of the envelope. Burning gas to give a hot air balloon greater lift 16 Catalyst February 2015 www.catalyststudent.org.uk Airships of the past airships.